 Products Home / 自動(電動)ステージ / 電動直線移動ステージ(リニアステージ) / 電動直線移動ステージ(リニアステージ):移動量50 mm / ダイレクトドライブサーボモーター直線移動ステージ(リニアステージ): 移動量50 mm
Products Home / 自動(電動)ステージ / 電動直線移動ステージ(リニアステージ) / 電動直線移動ステージ(リニアステージ):移動量50 mm / ダイレクトドライブサーボモーター直線移動ステージ(リニアステージ): 移動量50 mmダイレクトドライブサーボモーター直線移動ステージ(リニアステージ): 移動量50 mm
- 50 mm Travel at Speeds Up to 500 mm/s
- Brushless DC Servo Motors
- Stackable in XY Configuration
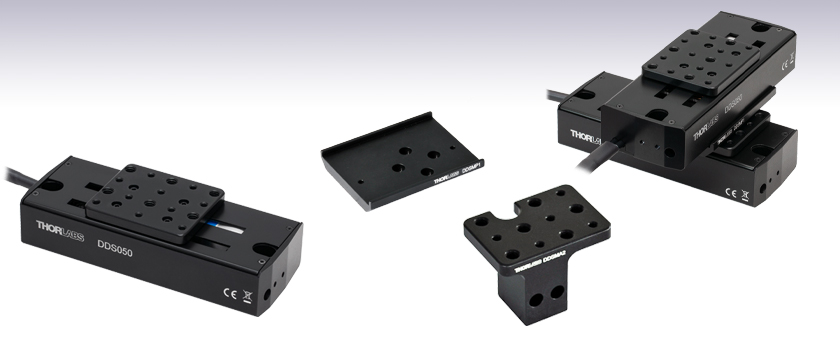
DDS050
50 mm (1.97") Servo Motor
Translation Stage
Application Idea
Two DDS050 Stages in XY Configuration,
Using an DDSMP1 Adapter Plate
DDSMP1
XY Adapter Plate
DDSMA2
End Mounting Adapter






Please Wait
| Item # | DDS050(/M) |
|---|---|
| Travel Range | 50 mm (1.97") |
| Speed (Max)a | 500 mm/s |
| Acceleration (Max) | 5000 mm/s2 |
| Bidirectional Repeatabilityb | ±1.5 µm |
| Straightness/Flatness | ±5.0 µm |
| Horizontal Load Capacity (Max) | 0.9 kg (1.98 lbs) |
| Min Incremental Movementc | 5.0 µm |
| Absolute On-Axis Accuracy | ±6.5 µm |
| Actuator Type | Brushless DC Servo Motor |
| Dimensions (L x W x H) | 145.0 mm x 57.0 mm x 35.0 mm (5.71" x 2.24" x 1.38") |
特長
- 移動量:50 mm
- ブラシレスDCリニアサーボモータ内蔵
- 光学式リニアエンコーダ
- 高品質で精密なリニアベアリング
- 水平耐荷重0.9 kg
- XY構成にスタック可能
DDS050/Mは、移動量50 mm、軸上精度±6.5 µm、最高移動速度500 mm/sの薄型ダイレクトドライブ直線移動ステージ(リニアステージ)です。この自動ステージは、自動アライメント、表面検査、マッピング、プロービングをはじめとする、高速で高精度の位置決めを必要とする用途に適しています。
ブラシレスリニアモータを内蔵した薄型設計を採用したことで、機械的な衝突や移動プラットフォームにアクセスする際の妨げの原因となる外部筐体を取り除きました。ブラシレスDCサーボモータは送りネジを必要としないためバックラッシュが生じません。また、内部にフレキシブルな管路を設けたため、機構部分が動いてもケーブル類が引っ掛かりません。精密溝付きのリニアベアリングによって、優れた剛性と直線性、および高い軸上精度を実現しています。バックラッシュのない操作性と高分解能の閉ループ光学フィードバックにより、±1.5 μmという高い双方向再現性が得られています。

Click to Enlarge
これらのステージを駆動するには、K-CubeブラシレスDCサーボモーターコントローラKBD101(別売り、下記参照)が必要です。
| Motorized Linear Translation Stages | |
|---|---|
| 12 mm | Standard |
| 25 mm | Compact |
| Standard | |
| TravelMax | |
| 50 mm | Compact |
| Direct-Drive Servo | |
| TravelMax | |
| Long Travel: 100 mm to 300 mm | |
コントローラ
ダイレクトドライブの直線移動ステージDDS050/Mを操作するには、K-Cube®ブラシレスDCモーターコントローラKBD101が必要です。コントローラではS字加減速を自由に設定できるため、振動や衝撃の無い高速で滑らかな位置決めが可能です。ブラシレスDCモーターコントローラの製品概要については下記をご覧ください。またはこちらをクリックして詳しい製品説明をご参照ください。
取付けアダプタ
2軸構成が必要な場合には、上の写真のようにXYアダプタープレートDDSMP1/Mを用いて2つのステージをボルトで固定し、XYステージを構成することができます。なおこのステージは垂直方向(Z軸)の移動には適していません。詳しくは当社までお問い合わせください。
ディレイラインを構築するときのように、リニア移動ステージに近接してオプトメカニクス部品を取り付けたいときに利用できる、アダプターブラケットもご用意しております。詳細については下記をご参照ください。
注:磁性部品はステージのプラットフォーム上には取り付けないでください。磁界により正確なホーミングができなくなり、磁性部品を取り外した後もステージのエンコーダの精度に影響を及ぼす可能性があります。電源が入ってないときのプラットフォームは、ほとんど慣性の無い実質的にフリーランの状態になります。そのため、電源が入ってないときには定めた位置に留まっていることが求められる用途には適しません。
| Item # | DDS050(/M) |
|---|---|
| Travel Range | 50 mm (1.97") |
| Speed (Max)a | 500 mm/s |
| Speed (Min)b | 70 nm/s |
| Acceleration (Max) | 5000 mm/s2 |
| Acceleration (Max) at 0.9 kg Load | 500 mm/s2 |
| Resolution | 500 nm |
| Bidirectional Repeatabilityc | ±1.5 µm |
| Backlash | N/A (No Leadscrew) |
| Min Incremental Movementd | 5.0 µm |
| Horizontal Load Capacity (Max) | 0.9 kg (1.98 lbs) |
| Absolute On-Axis Accuracy | ±6.5 µm |
| Straightness/Flatness | ±5.0 µm |
| Pitch | ±175 µrad |
| Yaw | ±175 µrad |
| Continuous Motor Forcee | 0.8 N |
| Peak Motor Force (5 s)f | 2.0 N |
| Bearing Type | High Rigidity Recirculating Precision Linear Bearing |
| Limit Switches | Magnetic Sensor at Each End of Stage |
| Operating Temperature Range | 5 to 40 °C (41 to 104 °F) |
| Motor Type | Brushless DC Linear Motor |
| Cable Length | 1 m (3.3') |
| Dimensions (L x W x H) | 145.0 mm x 57.0 mm x 35.0 mm (5.71" x 2.24" x 1.38") |
| Weight (with Cables) | 0.60 kg (1.3 lbs) |
モータ制御コネクタ
Dタイプオス型
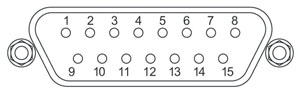
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Quadrature A- | 9 | Ground |
| 2 | Quadrature A+ | 10 | Motor Phase C |
| 3 | Quadrature B+ | 11 | Motor Phase A |
| 4 | Quadrature B- | 12 | Motor Phase B |
| 5 | Encoder Index I- | 13 | +5 V |
| 6 | Encoder Index I+ | 14 | Ground |
| 7 | Negative Limit | 15 | Stage ID |
| 8 | Positive Limit |
ソフトウェア
Kinesisバージョン1.14.52
XAバージョン1.0.0
KinesisおよびXAソフトウェアパッケージには、当社のモーションコントローラを制御するためのGUIが含まれています。
下記もご利用いただけます。
- 通信プロトコル

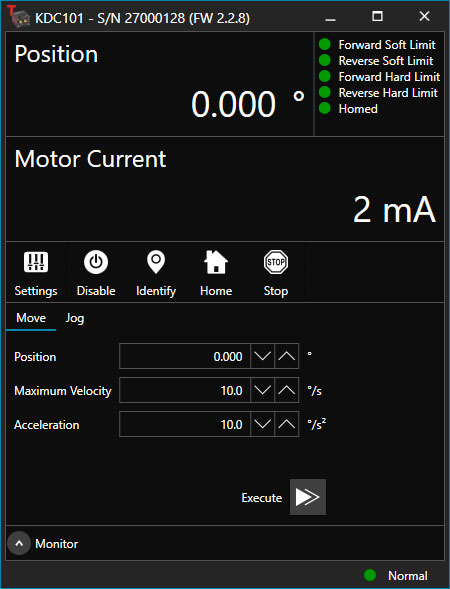
Figure 789AソフトウェアのGUI画面
当社では、様々なモーションコントローラを駆動するためのプラットフォームとして、XAソフトウェアパッケージと、今後段階的に終了していくKinesisソフトウェアパッケージの2種類をご用意しています。Kinesisソフトウェアは、当社の全てのモーションコントロール製品に対応しています。XAソフトウェアは開発者向けに改良されたプラットフォームですが、現在のところ定番のモーションコントロール製品の一部に対応している状況です(製品リストはこちらをご覧ください)。このソフトウェアは、継続して重点的に開発が進められており、最終的には当社の全てのモーションコントロール製品に対応する予定です。XAソフトウェアアプリケーションは、2040年までフルサポートを行います。
Kinesis モーションコントロールソフトウェア
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。また、.NETフレームワークを使用しないアプリケーション用に、ローレベルのDLLライブラリも付属しています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期をサポートしています。
この共通のソフトウェアプラットフォームにより、1種類のソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
Click to Enlarge
Figure 789B ブラシ付きDCサーボモーターコントローラKDC101用のXA GUI
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、この場合はコントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
XAモーションコントロールソフトウェア:開発者向けに改良されたプラットフォーム
XAはその基本から理解しやすいように設計されており、スレッドセーフで言語パラダイムに依存しないC、C++、C#/.NETのアプリケーションプログラミングインターフェイスを提供します。また、ネイティブ、.NET言語、PythonまたはLabVIEWアプリケーションに簡単に統合できる言語ラッパーも用意されています。これは前述のKinesisにおけるソフトウェア開発キット(SDK)と同じ機能を果たす一方で、開発者に対してはより効率化されたツールキットを提供します。このソフトウェアは、付属の開発者用ガイドとSDK内のコード例を組み合わせて、複雑でカスタマイズされたアプリケーションとインターフェースを作成しようとするユーザー向けに設計されています。完全なAPIドキュメントはネイティブCライブラリ用に提供されており、.NETラッパーのドキュメントは現在開発中です。.NETラッパーの詳細については当社までお問い合わせください。
XAはKinesisと同等のGUIを備えているだけでなく、デバイスの状態を保存する機能の追加や、異なる種類のデバイス間インテーフェイスにおける一貫性の向上など、利用者のための様々な改善や工夫が実装されています。Kinesisソフトウェアは段階的に終了となりますが、XAは更に改善を進めるとともに、2040年までフルサポートしていく計画です。現行バージョンのXAソフトウェアは、まだ当社のモーションコントローラの一部にのみ対応している状況です。しかし、このソフトウェアは、継続して重点的に開発が進められており、最終的には当社の全てのモーションコントロール製品に対応する予定です。ソフトウェアの適合性に関する情報は、XAのユーザーガイドに記載されています。また、サポートしているデバイスのリストなど、ソフトウェアのその他の詳細情報はこちらをご覧ください。
| Posted Comments: | |
Mattia Ronch
(posted 2021-07-21 13:23:33.08) Dear Madam/Sir,
would you be so kind to send me the 3D cad of this product?
Thanks for your attention.
Best regards,
MR DJayasuriya
(posted 2021-07-22 03:28:37.0) Thank you for your inquiry. You would be able to find this on our website :https://www.thorlabs.de/thorproduct.cfm?partnumber=DDS050/M ('Drawings and Documents'' table on he right hand side, you can download the 'Solidworks' file) tillsten
(posted 2018-11-12 21:20:09.777) It is possible to use the stage vertically? AManickavasagam
(posted 2018-11-14 06:51:56.0) Response from Arunthathi at Thorlabs - Thanks for your query. These do not have enough torque to be used in the Z configuration. You probably need a stage with a lead screw that provides sufficient torque such as our LNR50 or MTS50/M-Z8. linahacker91
(posted 2018-09-03 17:42:07.397) Hello, I'm looking for a linear 50 mm motorized stage with high position accuracy (Travel speed is not important and the load will be very low) and the positioning should be repeatable. I should probably choose a stepper motor, right? Or is there a cheaper option? Thank you for your help! AManickavasagam
(posted 2018-09-06 05:43:28.0) Response from Arunthathi @ Thorlabs: Thanks for your query. Yes you are correct comparatively for better repeatability, it will be best to use a stepper motor actuator - stage such as the LNR50S which has 0.5 µm Bidirectional repeatability. However, for even more precise positioning we offer LNR50SE which has an inbuilt encoder that works in closed loop with the actuator to maintain positional accuracy. tim.may
(posted 2017-11-21 14:48:57.217) Hi, occasionally the ddsm50 will not 'home', gives 'Motor Error Detected (Value-position Error(0))' I end up closing the software and shutting off the kbd101 controller sn 28000398 and restarting, sometime it comes back ok, sometimes takes several cycles of the power. What's up with it?
the load is 0.48 kg, but even with load removed still fails to home. Thanks for any help.
Tim bhallewell
(posted 2017-12-01 09:12:28.0) Response from Ben at Thorlabs: Thank you for contacting us. This
Position Error message is posted when the achieved position is significantly different to the expected position. Typically this can be caused by running too fast with the given load. If the problem persists, it is suggested to Home the device at a lower velocity.
I will contact you directly to troubleshoot the issue. tim.may
(posted 2017-10-16 13:11:26.45) HI again, I asked about loading at .59# but realise i also have a plate mounted that is 0.48# so the total is >1 kg, beyond the 0.9 limit.
my bad, trying another plate
thanks tim bwood
(posted 2017-10-17 06:24:02.0) Response from Ben at Thorlabs: Thank you for your feedback. You should try and limit the load on the stage to below 1kg. However, you may have to change the PID loop settings to suit the load on the stage anyway. You can find more details on this in section 6.3.4 of the KBD101 manual. tim.may
(posted 2017-10-14 12:47:37.067) I have a single stage with load of 1.24# or .56 kg and the stage oscillates on positioning away from home. can some parameter in the loop be adjusted to stop the oscillation? I saw comment here that state 0.9kg is possible, but couldn't find that on spec page.
Thanks bwood
(posted 2017-10-17 06:33:26.0) Please find my responce above. d.baresch
(posted 2017-07-24 17:47:57.79) The maximum specified horizontal load is 0.9kg. Does this mean that with 2 DDSM50 mounted in XY configuration the only useful load left is 0.3kg (given 1 DDSM50 weighs 0.6kg)? bwood
(posted 2017-07-25 10:56:41.0) Response from Ben at Thorlabs: Thank you for your feedback. This is correct, according to the specifications the maximum load of an XY DDSM50 assembly will be 0.3 kg. If you need a high load, we would recommend the MTS50 and LNR50. zali023
(posted 2016-08-21 15:14:16.467) Hi
I am currently using a 50 mm (1.97") Compact Motorized Translation Stage, but its velocity stability at ±0.25 mm/sec is too high my application, could you please advise me on the velocity stability for this instrument? bhallewell
(posted 2016-08-22 11:20:52.0) Response from Ben at Thorlabs: Thank you for your feedback. The velocity ripple would be dependent upon the PID control loop settings, the load applied to the stage & also the velocity that you are moving to & from. Generally moving to a lower velocity, you will find a higher percentage ripple however at a reduced deviation. I will contact you to obtain details of your setup to see if this can be optimised. vopop
(posted 2016-06-09 15:03:32.63) I want to use DDSM50 with '30 mm Cubes with Premounted Turning Mirrors' in vertically aligned state. I saw there written we can not use in vertically aligned state. So, I wonder whether this means just due to there is no stopping force or its due to malfunctioning. besembeson
(posted 2016-06-09 09:41:15.0) Response from Bweh at Thorlabs USA: Yes it is due to no stopping force. When no power is applied, the stage has very little inertia so the platform will roll down under its weight and mounted components. cbrideau
(posted 2015-09-23 18:34:29.417) What is the typical Angular Deviation for this mount? bhallewell
(posted 2015-09-30 06:49:25.0) Response from Ben at Thorlabs: Thank you for your question here. The spec that you are looking for would be synonymous with the Pitch & Yaw Run-out, which is ±175 µrad. This detail can be located in the ‘Specs’ tab. |
電動リニアステージ
電動の直線移動ステージとしては、ピエゾ駆動の20 µm移動ステージからダイレクトドライブ方式の600 mm移動ステージまで、様々な最大移動量の製品をご用意しております。ステージの多くは、それらを用いてXY軸やXYZ軸などの多軸ステージを構築することができます。ファイバ結合用としては、多軸ステージのページをご覧ください。標準の電動ステージを用いるよりも精密な調整が可能です。直線移動ステージのほかに、電動の回転ステージおよびゴニオステージもご用意しております。また手動移動ステージもございます。
ピエゾステージ
これらのステージでは、様々な駆動機構にピエゾ素子が組み込まれています。ステージORIC®シリーズでは、「スティック-スリップ」と呼ばれる摩擦特性を利用したピエゾ慣性アクチュエータが用いられており、それにより長い移動距離が得られています。当社のモジュール式クイック接続型移動ステージXR25シリーズは、同じ原理で動作するピエゾ慣性アクチュエータPIA25で駆動できます。移動ステージNanoflex™シリーズは、手動アクチュエータに加えて標準的なピエゾアクチュエータが用いられています。ステージElliptec®シリーズでは共振ピエゾモータが用いられており、共振に伴うモータ先端の楕円形の動きで可動プラットフォームを押したり引いたりします。Z軸ステージLPS710E/Mにはピエゾ移動に対する機械的な増幅機構が組み込まれており、またそれに適したコントローラが付属しています。
| Piezoelectric Stages | ||||
|---|---|---|---|---|
| Product Family | ORIC® PDXZ1 Closed-Loop 4.5 mm Vertical Stage | ORIC® PD2 Open-Loop 5 mm Stage | ORIC® PDX2 Closed-Loop 5 mm Stage | ORIC® PDX4 Closed-Loop 12 mm Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 4.5 mm | 5 mm | 12 mm | |
| Speed | 1 mm/s (Typ.)a | 10 mm/s (Typ. Max)b | 8 mm/s (Typ.)c | 15 mm/s (Typ.)a |
| Drive Type | Piezoelectric Inertia Drive | |||
| Possible Axis Configurations | Z | X, XY, XYZ | ||
| Mounting Surface Size | 45.0 mm x 42.0 mm | 13.0 mm x 13.0 mm | 13.0 mm x 23.0 mm | |
| Additional Details | ||||
| Piezoelectric Stages | |||||||
|---|---|---|---|---|---|---|---|
| Product Family | ORIC® PD1 Open-Loop 20 mm Stage | ORIC® PD1D Open-Loop 20 mm Monolithic XY Stage | ORIC® PDX1 Closed-Loop 20 mm Stage | ORIC® PD3 Open-Loop 50 mm Stage | Compact Modular XRN25X 25 mm Stage | Modular XR25X 25 mm Stage | |
| Click Photo to Enlarge |  |  | 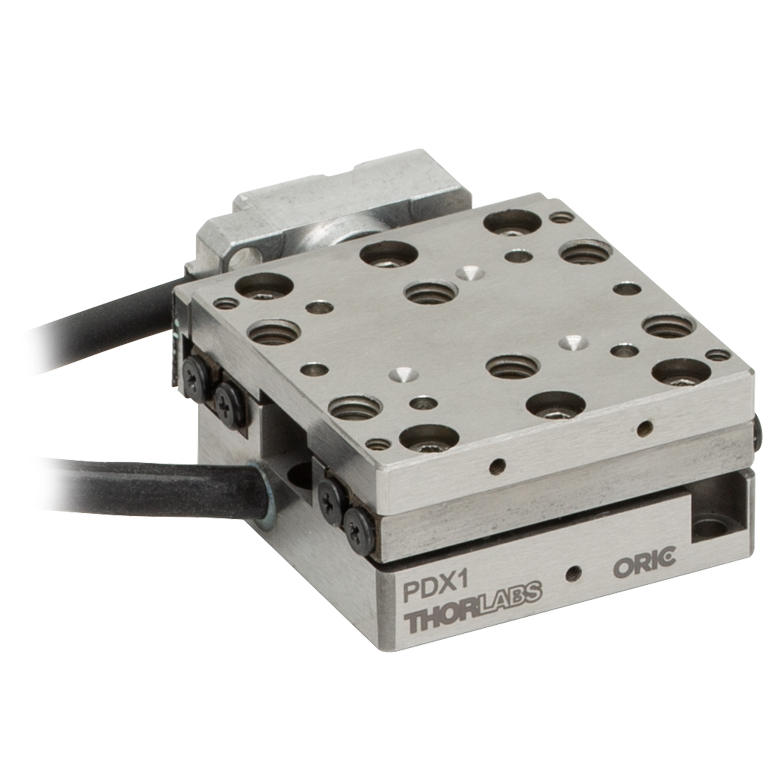 |  |  |  | |
| Travel | 20 mm | 50 mm | 25 mm | ||||
| Speed | 3 mm/s (Typ. Max)a | 20 mm/s (Typ. Max)b | 10 mm/sc | ≤3.6 mm/mind | ≤3.6 mm/mind | ||
| Drive Type | Piezoelectric Inertia Drive | ||||||
| Possible Axis Configurations | X, XY, XYZ | XY, XYZ | X, XY, XYZ | X, XY, XYZ | X, XY, YZ, XZ, XYZ | ||
| Mounting Surface Size | 30.0 mm x 30.0 mm | 80.0 mm x 30.0 mm | 85.0 mm x 50.7 mm | 110.0 mm x 75.7 mm | |||
| Additional Details | |||||||
| Piezoelectric Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | Nanoflex™ 20 µm Stage with 5 mm Actuator | Nanoflex™ 25 µm Stage with 1.5 mm Actuator | Elliptec® 28 mm Stage | Elliptec® 60 mm Stage | LPS710E 1.1 mm Vertical Stage | |
| Click Photo to Enlarge |  |  | 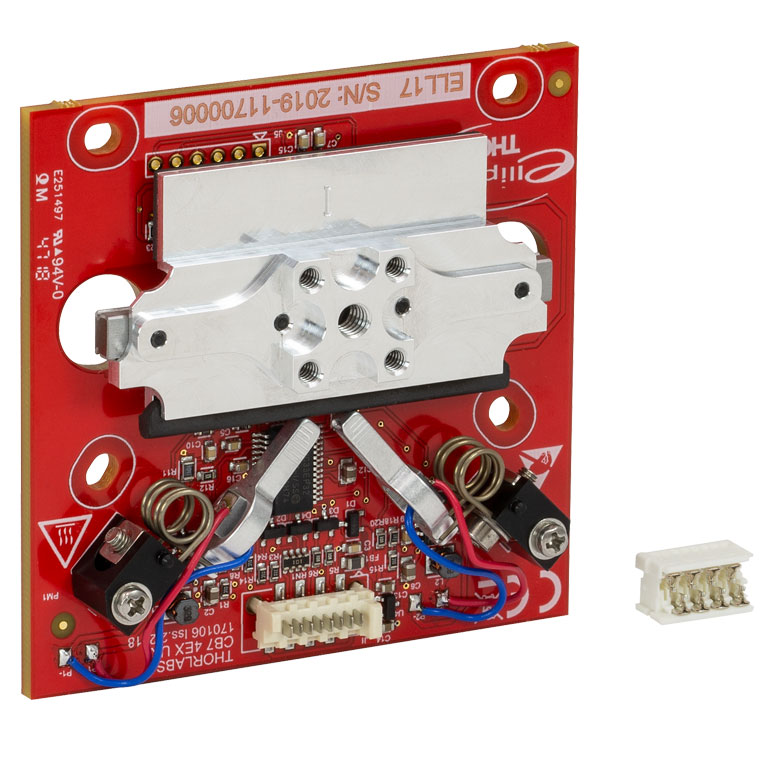 | 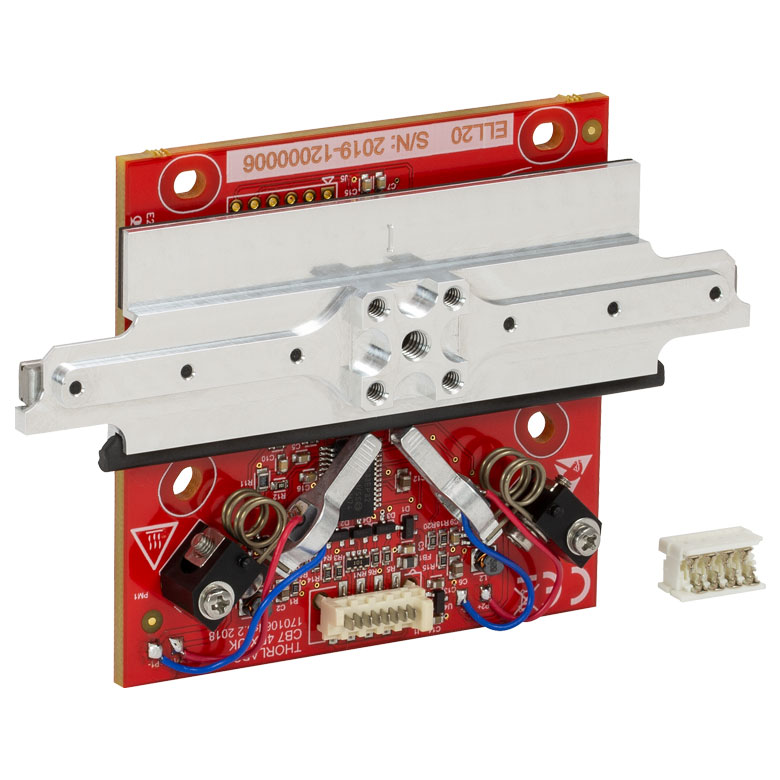 |  | |
| Travel | 20 µm + 5 mm Manual | 25 µm + 1.5 mm Manual | 28.0 mm | 60.0 mm | 1.1 mm | |
| Speed | - | 180 mm/s (Max) | 90 mm/s (Max) | - | ||
| Drive Type | Piezo with Manual Actuator | Resonant Piezoelectric Motor | Amplified Piezo | |||
| Possible Axis Configurations | X, XY, XYZ | X | Z | |||
| Mounting Surface Size | 75.0 mm x 75.0 mm | 30.0 mm x 30.0 mm | 15.0 mm x 15.0 mm | 21.0 mm x 21.0 mm | ||
| Additional Details | ||||||
ステッピングモーターステージ
こちらの移動ステージは脱着型あるいは内蔵型のステッピングモータを用いており、また300 mmまでの長い移動量が可能です。これらのステージの多くは多軸移動機能を有していたり(PLSXY)、あるいは多軸ステージを組み立てることが可能であったりします(PLSX、クイック接続型XR25シリーズ、LNRシリーズ、NRTシリーズ、LTSシリーズ)。ステージMLJ150/Mは高荷重にも対応する垂直移動ステージです。
| Stepper Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | MVSN1(/M) 13 mm Vertical Stage | PLS Series 1" Stages | Modular XR25 Series 25 mm Stage | LNR Series 25 mm Stage | LNR Series 50 mm Stage |
| Click Photo to Enlarge |  |  |  |  | 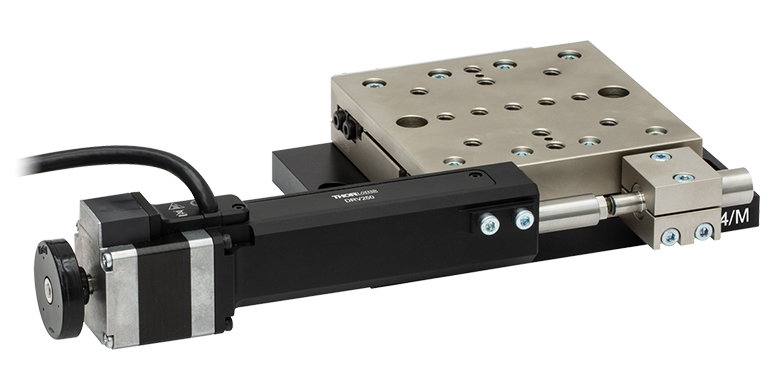 |
| Travel | 13 mm | 1" (25.4 mm) | 25 mm | 25 mm | 50 mm |
| Maximum Velocity | 5.0 mm/s | 7.0 mm/s | 2.0 mm/s | 2.0 mm/s | 50 mm/s |
| Possible Axis Configurations | Z | X, XY | X, XY, YZ, XZ, XYZ | X, XY, XYZ | X, XY, XYZ |
| Mounting Surface Size | 24.5 mm x 50.0 mm | 3" x 3" (76.2 mm x 76.2 mm) | 110.0 mm x 75.7 mm | 60 mm x 60 mm | 100 mm x 100 mm |
| Additional Details | |||||
| Stepper Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | NRT Series 100 mm Stage | NRT Series 150 mm Stage | LTS Series 150 mm Stage | LTS Series 300 mm Stage | MLJ250 50 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 100 mm | 150 mm | 150 mm | 300 mm | 50 mm | |
| Maximum Velocity | 30 mm/s | 50 mm/s | 3.0 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | Z | |||
| Mounting Surface Size | 84 mm x 84 mm | 100 mm x 90 mm | 148 mm x 131 mm | |||
| Additional Details | ||||||
DCサーボモーターステージ
脱着型あるいは内蔵型のDCサーボモータを用いた直線移動ステージをご用意しております。これらのステージは薄型で、多軸ステージの構築が可能です。
| DC Servo Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | MT Series 12 mm Stages | PT Series 25 mm Stages | Compact Modular XNR25X 25 mm Stage | Modular XR25X 25 mm Stage | M30 Series 30 mm Stage | M30 Series 30 mm Monolithic XY Stage |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Travel | 12 mm | 25 mm | 25 mm | 30 mm | ||
| Max Speed | 2.6 mm/s | 2.6 mm/sa | 2.4 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, YZ, XZ, XYZ | X, Z | XY, XZ | ||
| Mounting Surface Size | 61.0 mm x 61.0 mm | 101.6 mm x 76.2 mm | 85.0 mm x 50.7 mm | 110.0 mm x 75.7 mm | 115.0 mm x 115.0 mm | |
| Additional Details | ||||||
| DC Servo Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | MTS Series 25 mm Stage | MTS Series 50 mm Stage | MTS Series 100 mm Stage | M150 Series 150 mm XY Stage | KVS30 30 mm Vertical Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 25 mm | 50 mm | 100 mm | 150 mm | 30 mm |
| Max Speed | 2.4 mm/s | X-Axis: 170 mm/s Y-Axis: 230 mm/s | 8.0 mm/s | ||
| Possible Axis Configurations | X, XY, XYZ | XY | Z | ||
| Mounting Surface Size | 43.0 mm x 43.0 mm | 272.4 mm x 272.4 mm | 116.2 mm x 116.2 mm | ||
| Additional Details | |||||
ダイレクトドライブステージ
こちらの薄型ステージにはブラシレスDCサーボモータが内蔵されており、バックラッシュの無い高速移動が可能です。電源が入ってないときは、ステージのプラットフォームにはほとんど慣性が無く、実質的にフリーラン状態になります。そのため電源が入ってないときにステージのプラットフォームが定位置に留まる必要のある用途には適していません。これらのステージを垂直方向に取付けることは推奨しません。
| Direct Drive Stages | |||||
|---|---|---|---|---|---|
| Product Family | DDS Series 50 mm Stage | DDS Series 100 mm Stage | DDS Series 220 mm Stage | DDS Series 300 mm Stage | DDS Series 600 mm Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 50 mm | 100 mm | 220 mm | 300 mm | 600 mm |
| Maximum Velocity | 500 mm/s | 300 mm/s | 400 mm/s | 400 mm/s | |
| Possible Axis Configurations | X, XY | X, XY | X | X | |
| Mounting Surface Size | 60 mm x 52 mm | 88 mm x 88 mm | 120 mm x 120 mm | ||
| Additional Details | |||||

 ズーム
ズームDDS050/Mは高速移動と高い位置確度が特長で、データを収集しながら同時にカメラやプローブを一定の速度で移動する必要がある表面マッピングや解析用途に適しています。 安定した閉ループ式制御システムとコントローラKBD101を併せて使用することで、精密で微細な位置決めと制御が簡単に得られます。
注: 磁性部品はステージのプラットホーム上には取り付けないでください。磁石によりホーミングが正確に動作しなくなり、磁性部品を取り外した後もステージのエンコーダの精度に影響を及ぼす可能性があります。これらのステージは垂直方向(Z軸)の動作には適しておりませんのでご注意ください。電源が入ってないときのプラットフォームはロックされていない状態(フリーラン状態)になります。 そのため電源が入ってないときに定位置に留まる必要のある用途には適していません。
")
 ズーム
ズーム
Click to Enlarge
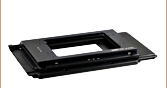
アダプタープレートDDSMA1(/M)およびDDSMA2(/M)を使用すると、ステージDDS050(/M)の移動部に近接してオプトメカニクス部品を取り付けることができます。

Click for Enlarge
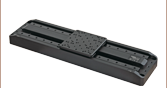
XYアダプタープレートDDSMP1(/M)を使用すると、ステージDDS050(/M)を2つ用いてXYステージを構成できます。
2軸構成が必要な場合には、右の写真のようにアダプタープレートDDSMP1/Mを用いて2つのステージDDS050/Mをボルトで固定し、XYステージを構成できます。
アダプタープレートDDSMA1/MおよびDDSMA2/Mは、付属のM3 x 20ネジ2個を使用してステージDDS050/Mの端部に取り付けられます(右の写真参照)。アダプタープレートを利用すると、ディレイラインを構成するときのように、直線移動するステージに近接してオプトメカニクス部品を取付けることができます。プレートには6つのM6 x 1.0タップ穴と5つのM4 x 0.7タップ穴があります。

 ズーム
ズーム
- 前面パネルに電動ステージやアクチュエータ制御用の速度ホイールとデジタル表示画面
- 2つの双方向SMCトリガーポート(外部機器からの信号読み取りや外部機器の制御用)
- 付属のUSBケーブルでPCに接続
- KinesisおよびXAソフトウェアに完全対応
- コンパクトな設置面積:60 mm x 60 mm x 49.2 mm
- 電源は付属しません(下記参照)
K-Cube®ブラシレスDCモーターコントローラKBD101は、1台のモータの回転軸を手動またはPCで制御します。上面のコントロールパネルには速度ホイールがあり、位置のプリセットに加えて、順方向ならびに逆方向のジョグ動作と双方向の4段階速度制御が可能です。上面パネルのデジタル表示にはバックライトが付いており、メニュー選択により暗くしたり消灯したりすることが可能です。ユニット前面には双方向のSMCトリガーポートが2つあり、5 Vの外部ロジック信号を読み取ることや、5 Vロジック信号を出力して外部機器を制御することができます。それぞれのポートの機能は独立に設定することができます。
コントローラKBD101については、当社のKinesisおよびXAの両ソフトウェアがサポートしていますが、XAは現時点ですべてのモーションコントロールデバイスをサポートしているわけではありません。XAがサポートしている製品の一覧は、こちらからご覧いただけます。詳細は「Kinesis & XAソフトウェア」タブをご参照ください。
このコントローラには電源が付属しませんのでご注意ください。対応可能な電源は下記のとおりです。詳細はブラシレスDCサーボモーターコントローラKBD101の製品紹介ページでご覧ください。

 ズーム
ズーム
Click to Enlarge
Figure 780A 電源ユニットKPS201(日本国内向けアダプタと共に発送します)
- 電源(単体)
- KPS201: K-Cube®、T-Cubes™ 用、3.5 mmジャック付き
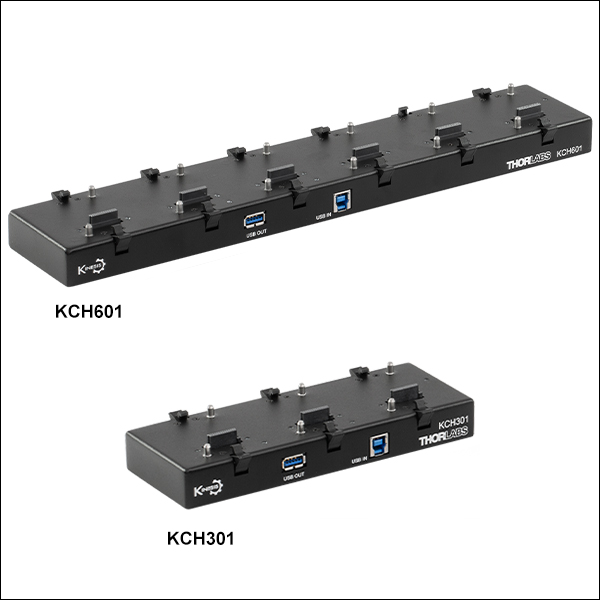
- 電源供給と通信機能を備えたUSBコントローラハブ
- KCH301: 3台までのK-CubeまたはT-Cube用
- KCH601: 6台までのK-CubeまたはT-Cube用
電源KPS201の出力電圧は+15 VDC、最大電流は2.66 Aで、3.5 mmジャックで1台のK-CubeまたはT-Cubeに電力を供給します。標準的な壁コンセントに接続して使用します。
USBコントローラーハブKCH301およびKCH601は次の2つの機能を有しています。1つはハブ機能で、最大3台(KCH301)または6台(KCH601)までのK-CubeまたはT-Cubeをサポートします。もう1つは電源機能で、標準的な壁コンセントに接続するだけで必要な電力の供給を行います。ただし、ハブが供給できる最大電流は10 Aです。お使いになる全Cubeの必要電流が合計で10 A以上にはならないことをお確かめください。 また、このハブに取り付けられたすべてのT-CubeやK-Cubeに対して、1本のUSBケーブルで接続することができます。
USBコントローラハブの詳細は、製品ページをご参照ください。