 Products Home
Products Home電動直線移動ステージ(リニアステージ)、移動量12 mm
- 12 mm (0.47") of Travel per Axis
- 1/4"-20 or M6 Tapped Holes for Mounting Standard Optomechanics
- Sold in Single-Axis and XYZ Configurations
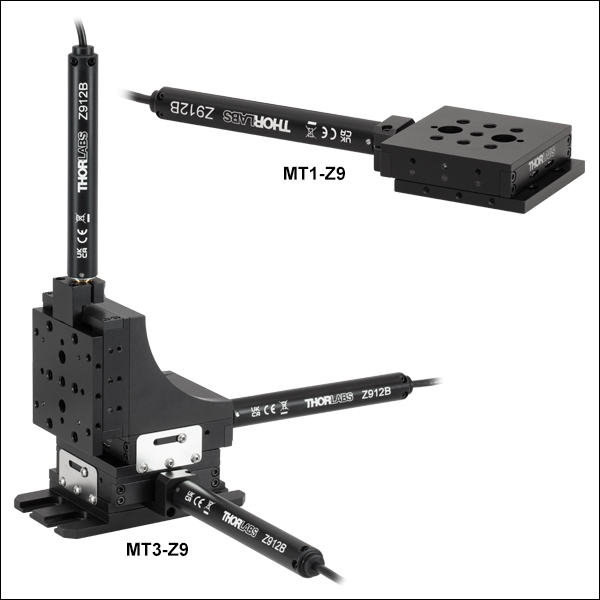
MT1-Z9
1-Axis Stage
MT401
Breadboard Mounting Adapter
MT405
Side-Mounted Actuator Adapter
MT3-Z9
3-Axis Stage








Please Wait
| Key Specificationsa | |
|---|---|
| Travel Range | 12 mm (0.47") |
| Velocity (Max)b | 2.6 mm/s |
| Uncompensated Backlash | 13 µm |
| Residual Backlash After Compensationc | 0.7 µm |
| Min Repeatable Incremental Movement | 0.2 µm |
| Uncompensated/Compensated Bidirectional Repeatability | ±7 µm / ±0.7 µm |
| Horizontal Load Capacity (Max) | 20 lbs (9.0 kg) |
| Vertical Load Capacity (Max)d | Motor Pushing Down: 4.4 lbs (2.0 kg) |
| Motor Pushing Up: 10 lbs (4.5 kg) | |
| Included Actuator | Z912B DC Motor |
| Cable Length | 485 mm (1.59 ft) |
| Recommended Controller | KDC101 |
| Motorized Linear Translation Stages | |
|---|---|
| 12 mm | Standard |
| 25 mm | Compact |
| Standard | |
| TravelMax | |
| 50 mm | Compact |
| Direct-Drive Servo | |
| TravelMax | |
| Long Travel: 100 mm to 300 mm | |
特長
- 移動量:12 mm
- キャリッジにはM6のタップ穴が7個
- ステージ位置は固定ネジで固定
- ブレッドボードへの取付けやXY/XZ/XYZステージ構築のためのアダプタもご用意
- DCサーボモーターアクチュエータ
電動移動ステージ(リニアステージ)を使用すると、電子制御により、精密に定められた軸に沿って直線移動をさせることができます。1軸移動ステージMT1/M-Z9の移動量は12 mmです。3軸移動ステージMT3/M-Z9は3次元での移動が可能です。3軸ステージは、3つの1軸ステージMT1/M-Z9、ベースプレートMT401、および直角ブラケットMT402で構成されています(別売りでもご用意、下記参照)。各ステージには7個のM6タップ穴が25.0 mm x 25.0 mmのマトリックス状に配置されており、標準的なオプトメカニクスを取り付けることができます。
可動プラットフォームにはアライメントピン用の穴が付いているため、ステージを他のステージに重ねたりアクセサリに接続したりするときに、それらの直交性を確保できます。水平方向の耐荷重9 kg、垂直方向の耐荷重2.0 kg(モータがステージを押し下げているとき)または4.5 kg(モータがステージを押し上げているとき)は、アクチュエータの67.49:1のインライン遊星ギアヘッドにより支持されています。3軸ステージMT3/M-Z9の場合は垂直のアクチュエータがステージを押し下げており、従って垂直方向の耐荷重は2.0 kgになります。このステージは、硬化スチール製のリニアベアリングを採用することで、精密な移動と長寿命を実現しています。
取付けアダプタとステージの組合せについて
当社では移動ステージMT1/M-Z9を光学テーブルやブレッドボードに取り付けたり、いくつかのステージを組み合わせてXY、XZ、またはXYZステージを構築したりできるように、アダプタープレートやブラケットをご用意しています。またアクチュエータの取付け位置を変えることで、ステージ全体を短くすることも可能です。アダプタの使用例については下の写真をご覧ください。
付属品および対応するアクチュエータについて
付属するDCサーボアクチュエータZ912Bには、長さ485 mmのケーブル、移動範囲を制限するリミットスイッチ、および分解能29 nmのエンコーダが付いています(詳細は「仕様」タブをご覧ください)。このアクチュエータは、Ø9.5 mm(Ø3/8インチ)バレルをフレクシャークランプで締め付けて移動ステージに取り付けられています。必要に応じて、Z912Bの代わりにステッピングモータ用アクチュエータや手動マイクロメータなど、Ø9.5 mm(Ø3/8インチ)バレルの付いた移動量12 mmの手動または電動のアクチュエータに交換することができます。
コントローラについて
MT1/M-Z9などの低電力ステージ用としては、DCサーボモーターコントローラKDC101をお勧めします。KDC101は1軸用のコントローラですが、PCの有無に関わらずお使いいただけます。このコントローラにはソフトウェアKinesis®が付属しており、これを用いれば製品到着後すぐにPCによるステージ制御が可能になります。また、このソフトウェアはLabVIEW、LabWindows、ActiveXなどの一般的なプログラミングインターフェイスもサポートしています。KDC101にはUSBケーブルが付属します。電源は別売りです。詳しくは下記をご覧ください。
| Motor Specifications | |
|---|---|
| Motor Type | DC Servo |
| Cable Length | 485 mm (1.59 ft) |
| Motor Drive Voltage | 6 VDC |
| Feedback | Motor-Mounted Rotary Encoder |
| Encoder Counts per Lead Screw Revolution | 34,555 |
| Planetary Gear Head Ratio | 67.49:1 |
分解能の計算
Z912Bでは、モータ1回転あたりのエンコーダ出力は512カウントです。モータの出力軸はギア比67:49:1の遊星ギアヘッドに取り付けられています。従って、1.0 mmピッチの送りネジを1回転させるには、モータを67.49回転させる必要があります。送りネジを1.0 mm移動させる場合を考えると、エンコーダの1カウント毎のアクチュエータの直線移動量は以下のように計算できます。
送りネジ1回転あたりのエンコーダのカウント数は、512 x 67.49 = 34,555 になります。
従って、エンコーダの1カウントに対する送りネジの直線移動量は以下のように与えられます。
1.0 mm / 34,555 カウント = 2.9 x 10-5 mm (29 nm).
| Stage Specifications | |
|---|---|
| Translation | |
| Travel Range | 12 mm (0.47") |
| Uncompensated Backlash | 13 µm |
| Residual Backlash After Compensationa | 0.7 µm |
| Min Repeatable Incremental Movement | 0.2 µm |
| Homing Repeatability | ±6 µm |
| Uncompensated/Compensated Bidirectional Repeatabilityb | ±7 µm / ±0.7 µm |
| Resolution | 29 nm (See Calculation at Right) |
| Motion Parameters | |
| Velocity (Max)c | 2.6 mm/sec |
| Acceleration (Max) | 4 mm/s2 |
| Max Load Capacity | |
| Vertical Loadd | Motor Pushing Down: 4.4 lbs (2.0 kg) |
| Motor Pushing Up: 10 lbs (4.5 kg) | |
| Horizontal Load | 20 lbs (9.0 kg) |
| Orthogonality | |
| Angular Deviation | < 250 µrad |
| Absolute On-Axis Accuracy | 95 µm |
| Percentage Accuracy (Max) | 0.82% |
| Physical | |
| Dimensionse | 7.78" x 2.41" x 0.81" (197.7 mm x 61.2 mm x 20.6 mm) |
Z912Bコネクタピン配列
Dタイプオス
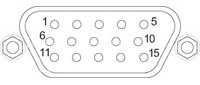
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Ground (Limit and Vcc) | 9 | Resistive Identification |
| 2 | Forward Limit | 10 | Vcc (+5 V DC) |
| 3 | Reverse Limit | 11 | Encoder Channel A |
| 4 | Reserved for Future Use | 12 | Reserved for Future Use |
| 5 | Motor (-) | 13 | Encoder Channel B |
| 6 | Reserved for Future Use | 14 | Pin 2 Ident EEPROM |
| 7 | Motor (+) | 15 | Pin 1 Ident EEPROM |
| 8 | Reserved for Future Use |
当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.47
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
| Posted Comments: | |
user
(posted 2022-09-13 13:28:34.57) What is the lifetime of the 1-axis stage MT1/M-Z8? The piezo inertia translation stage has a specified lifetime of >10 billion steps, but how about the MT1/M-Z8? For example, how many continuous cycles of 3 mm travel forward and 3 mm reverse (at 3 mm/s), with say 100 g horizontal load, can MT1/M-Z8 perform in its lifetime. Thanks in advance! cwright
(posted 2022-09-14 09:22:26.0) Response from Charles at Thorlabs: Thank you for your query. We do not specify a lifetime for this stage as it is dependent on how the stage is used (payload, travel range, duty cycle, etc). Therefore there is no single data point for life expectancy. A lifetime would create an expectation of life which may not be achieved under a users specific operating conditions and maintenance schedule. To ensure good performance and prevent wear we would suggest regreasing every 50,000 cycles or every 6 months. If only a limited travel range is used then periodically run the full travel to redistribute the grease. rubing Li
(posted 2022-08-01 21:44:38.197) Kinesis version 1.14.33 is installed, but when I use it to move the Z812B stage, the distance displayed by the KDC101 is not the same as what the software displays. DJayasuriya
(posted 2022-08-02 08:41:58.0) Thank you for your inquiry. This maybe a rounding issue with the software and the firmware. We will get in touch with you directly to resolve this. Tyler Fiebig
(posted 2021-12-09 17:47:40.54) The vertical stage relies entirely on a spring to return it back after being pushed out. This is a huge problem if the stage has any amount of weight on it. jgreschler
(posted 2021-12-14 09:57:06.0) Thank you for reaching out to Thorlabs. The vertical load capacity of the MT3-Z8 stage is 10 lbs or 4.5 kgs. If your application requires a load greater than that I'd recommend MLJ150 as an alternative stage with 44 lbs or 20 kg load capacity. Kim Hyeonjin
(posted 2021-02-16 11:27:28.353) Hello, recently I found that the stage is not going straight, but rotates every 1mm. Can we fix this issue? Thank you very much. asundararaj
(posted 2021-03-10 04:22:57.0) Thank you for contacting Thorlabs. I have directly contacted you to troubleshoot via email. Bryan Hennelly
(posted 2020-09-16 10:57:50.727) Just wondering if there is a micromanager plugin for the controller. I know the older version did work with MM but I cant get this one to. If not can you please supply serial commands to the controller. Thanks. llamb
(posted 2020-09-18 08:51:12.0) Thank you for contacting Thorlabs. Since Micromanager plugins are not developed by Thorlabs, we unfortunately cannot thoroughly support its usage. Serial commands can certainly be used though, and can be found in the Communications Protocol document, downloadable from here: https://www.thorlabs.com/software_pages/viewsoftwarepage.cfm?code=Motion_Control. I have reached out to you directly by email as well. Daniela Comelli
(posted 2020-03-23 11:09:25.363) Dear sirs,
I'm intersted in your MT1/M-Z8 linear translator.
I would like to know how Thorlabs defines unidirectional and bidirectional repeatibility for its linear translator and which are the estimated value for this specific model.
Similarly, how Thorlabs defined the backlash of its linear translator ?
My inquiry is related with the fact that I thought that bidirectional repeatibility and backlash are the same parameters, but probably I'm wrong.
Thanks in advance,
best regards,
Daniela Comelli llamb
(posted 2020-03-24 04:33:42.0) Hello Daniela, thank you for your feedback. Unidirectional repeatability is how close the stage can achieve the same position when commanded to approach that position in the same direction; bidirectional repeatability is defined the same way, but approaching that point from either direction. We unfortunately do not have a unidirectional repeatability spec for the Z812B motors used in the MT1/M-Z8 stages, though expect this to be smaller than the bidirectional repeatability spec. These repeatabiliity specs apply over the full travel range, while backlash is caused by clearance between gears or the lead screw. Backlash is always going to exist with these leadscrew-based motors, though using the backlash correction feature in our software will ensure that the commanded position is always approached from the same direction to avoid this backlash error. user
(posted 2019-11-25 18:19:52.38) Really need to upgrade your website in the "APT tutorials" section as most web browsers no longer support Adobe Flash Player. llamb
(posted 2019-11-26 12:13:31.0) Thank you for your feedback. We will look into updating our APT Tutorials. user
(posted 2019-04-11 11:37:30.323) Dear Sir/Madame,
Are there Python drivers written for the motion controllers, or would I have to write my own?
Kindest regards, llamb
(posted 2019-04-12 08:37:21.0) Thank you for contacting Thorlabs. While our motion control software can be used in Python, we do not officially support it at this time. However, we do have a few minimal working examples we can provide as a courtesy, including one in IronPython, one in CPython, and a serial command-based script. I will reach out to you directly with these examples. chuanyaozhou
(posted 2018-04-02 16:06:53.94) Dear Engineer,
I am Chuanyao Zhou from Dalian Institute of Chemical Physics, China. I am interested in your MT products. I want to use them in a vacuum (better than 10^-5 torr) chamber. I am wondering whether they are vacuum compatible and can be used in our case. Thanks!
best regards,
Chuanyao YLohia
(posted 2018-04-03 09:41:05.0) Hello Chuanyao, thank you for your interest in our products. While the MT1/M-Z8 is not vacuum-compatible (due to black anodizing and lack of vacuum grease/epoxy etc.), we may be able to offer a vacuum-compatible version as a special to you. We will reach out directly to you to discuss this further. hadi.abidin
(posted 2013-04-19 20:20:09.283) How will this linear stage perform when mounted vertically under low vacuum(100mbar).
Can you provide a quotation for a vacuum version of this stage tcohen
(posted 2013-04-25 11:08:00.0) Response from Tim at Thorlabs: The stage itself should be fine for this low vacuum. The motor, however, would likely require adding vacuum compatible greases. We will contact you with a quotation. klee
(posted 2009-10-01 12:32:45.0) A response from Ken at Thorlabs to kraghunath: The weight of the MT3-Z8 is about 3.2 lbs. The length of the motor cable is 0.5m. The length of the USB cable is 2m. kraghunath
(posted 2009-10-01 06:54:43.0) 1. what is the total weight of the MT3-Z8 with base plate
2. what is the typical length of RS 232 cable provided for control from TDC001 to MT3-Z8.
3. what is the typical length of USB cable provided for PC control to TDC001.
Raghunath jens
(posted 2009-06-19 09:04:18.0) A reply from Jens at Thorlabs: the calculated displacement is indeed 2.9 x 10-5mm which is the same as 29nm. The first number is given in millimeter which might be confusing so it is 2.9 x 10-8 meter. kadri
(posted 2009-06-18 22:17:23.0) I am thinking whether 29 nm or 29 micron is the correct value in the information below
"The linear displacement of the actuator per encoder count is given by
512 x 67 = 34,304 encoder counts per revolution of the lead screw,
whereas the linear displacement of the lead screw per encoder count is given by
1.0 mm / 34,304 counts = 2.9 x 10-5 mm (29 nm)." jens
(posted 2009-05-27 08:32:31.0) A reply from Jens at Thorlabs: the standard stage as offered on the web page is not designed for vaccuum application, we can however offer a custom version which will be unanodized, using vacuum compatible actuator, grease and epoxy. We will contact you with a quotation. rafal.rakowski
(posted 2009-05-27 08:18:33.0) Hello,
My question is: will be work this stage under vacuum ?
Thank you in advance for reply,
Best regards,
Rafal Rakowski, PhD
********************* Tyler
(posted 2008-06-05 15:56:03.0) A response from Tyler at Thorlabs to gogabis: An application engineer attempted to simulate the situation you described and found that the stage functioned without any issues, even when oriented upside down. They will be contacting you with more details regarding the simulation. Thank you for your interest in our products. gogabis
(posted 2008-06-05 06:10:20.0) I have MT1/M-Z6 and planning load it with substanshial moment (2kg*0.10cm not load specified in yours specification) and main problem upside down is it possible ? Will it be backslash problem ? stifout
(posted 2007-12-26 03:35:58.0) Is it possible to request MT1/M Translation Stage eqquipped with a step motor instead
of DC motor? If possible, how much such product will cost?
Thanks, A. Stifutkin |
電動リニアステージ
電動の直線移動ステージとしては、ピエゾ駆動の20 µm移動ステージからダイレクトドライブ方式の600 mm移動ステージまで、様々な最大移動量の製品をご用意しております。ステージの多くは、それらを用いてXY軸やXYZ軸などの多軸ステージを構築することができます。ファイバ結合用としては、多軸ステージのページをご覧ください。標準の電動ステージを用いるよりも精密な調整が可能です。直線移動ステージのほかに、電動の回転ステージおよびゴニオステージもご用意しております。また手動移動ステージもございます。
ピエゾステージ
これらのステージでは、様々な駆動機構にピエゾ素子が組み込まれています。ステージORIC®シリーズでは、「スティック-スリップ」と呼ばれる摩擦特性を利用したピエゾ慣性アクチュエータが用いられており、それにより長い移動距離が得られています。移動ステージNanoflex™シリーズは、手動アクチュエータに加えて標準的なピエゾアクチュエータが用いられています。ステージElliptec®シリーズでは共振ピエゾモータが用いられており、共振に伴うモータ先端の楕円形の動きで可動プラットフォームを押したり引いたりします。Z軸ステージLPS710E/Mにはピエゾ移動に対する機械的な増幅機構が組み込まれており、またそれに適したコントローラが付属しています。
| Piezoelectric Stages | ||||
|---|---|---|---|---|
| Product Family | ORIC® PDXZ1 Closed-Loop 4.5 mm Vertical Stage | ORIC® PD2 Open-Loop 5 mm Stage | ORIC® PDX2 Closed-Loop 5 mm Stage | |
| Click Photo to Enlarge |  |  |  | |
| Travel | 4.5 mm | 5 mm | ||
| Speed | 1 mm/s (Typ.)a | 10 mm/s (Typ. Max)b | 8 mm/s (Typ.)c | |
| Drive Type | Piezoelectric Inertia Drive | |||
| Possible Axis Configurations | Z | X, XY, XYZ | ||
| Mounting Surface Size | 45.0 mm x 42.0 mm | 13 mm x 13 mm | ||
| Additional Details | ||||
| Piezoelectric Stages | |||||
|---|---|---|---|---|---|
| Product Family | ORIC® PD1 Open-Loop 20 mm Stage | ORIC® PD1D Open-Loop 20 mm Monolithic XY Stage | ORIC® PDX1 Closed-Loop 20 mm Stage | ORIC® PD3 Open-Loop 50 mm Stage | |
| Click Photo to Enlarge |  |  | 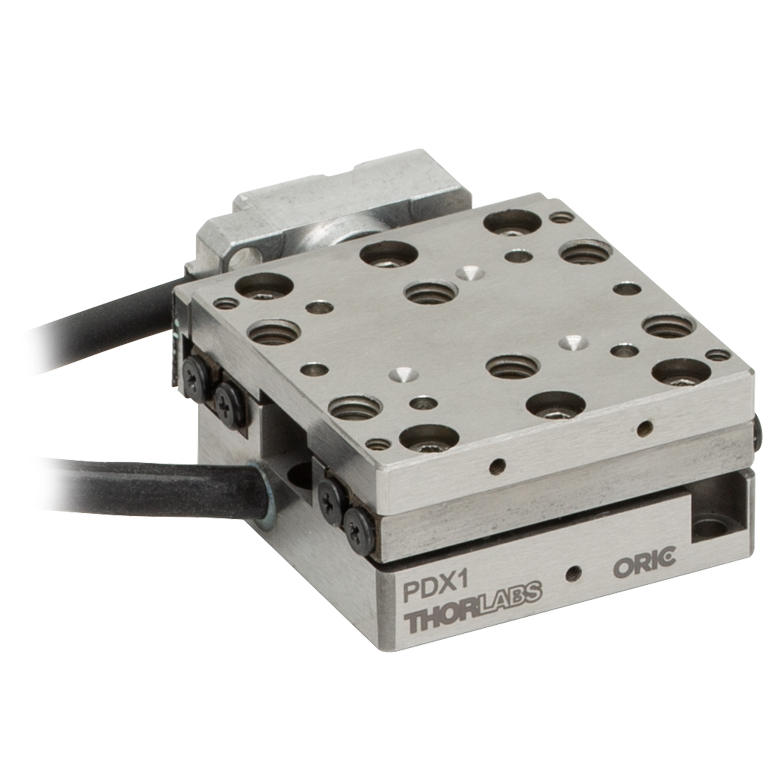 |  | |
| Travel | 20 mm | 50 mm | |||
| Speed | 3 mm/s (Typ. Max)a | 20 mm/s (Typ. Max)b | 10 mm/sc | ||
| Drive Type | Piezoelectric Inertia Drive | ||||
| Possible Axis Configurations | X, XY, XYZ | XY, XYZ | X, XY, XYZ | X, XY, XYZ | |
| Mounting Surface Size | 30 mm x 30 mm | 80 mm x 30 mm | |||
| Additional Details | |||||
| Piezoelectric Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | Nanoflex™ 20 µm Stage with 5 mm Actuator | Nanoflex™ 25 µm Stage with 1.5 mm Actuator | Elliptec® 28 mm Stage | Elliptec® 60 mm Stage | LPS710E 1.1 mm Vertical Stage | |
| Click Photo to Enlarge |  |  | 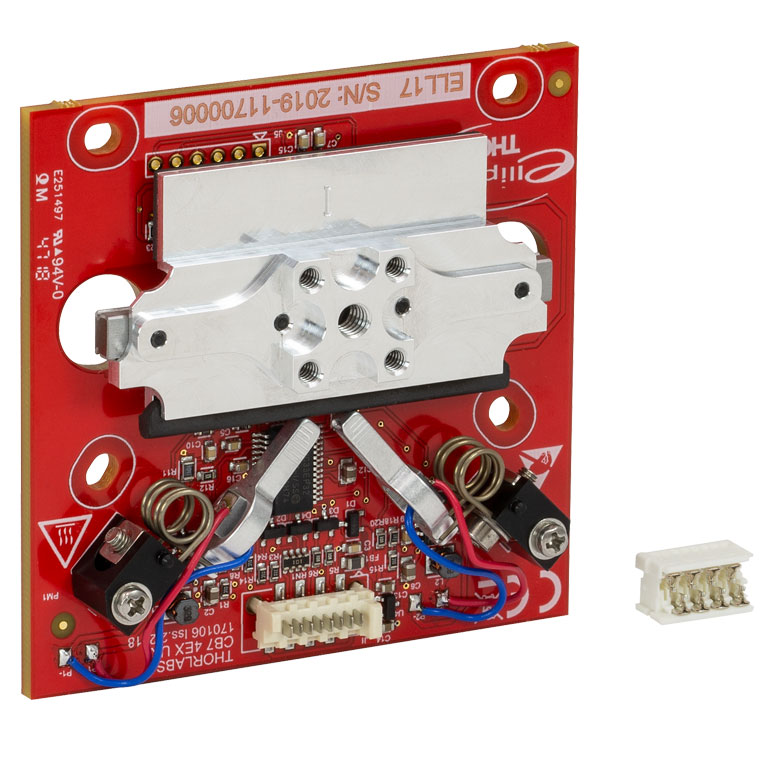 | 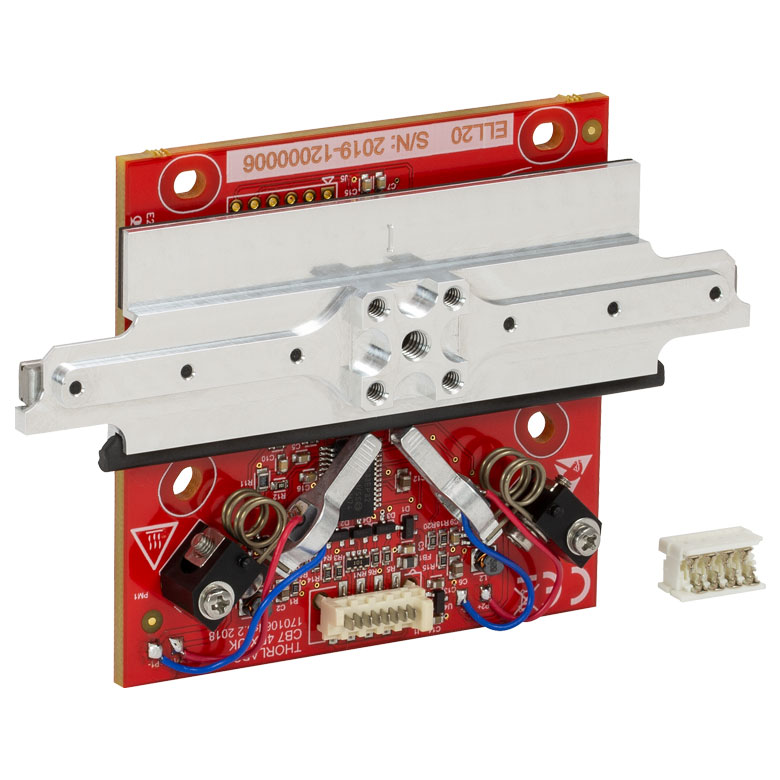 |  | |
| Travel | 20 µm + 5 mm Manual | 25 µm + 1.5 mm Manual | 28 mm | 60.0 mm | 1.1 mm | |
| Maximum Velocity | - | 180 mm/s | 90 mm/s | - | ||
| Drive Type | Piezo with Manual Actuator | Resonant Piezoelectric Motor | Amplified Piezo | |||
| Possible Axis Configurations | X, XY, XYZ | X | Z | |||
| Mounting Surface Size | 75 mm x 75 mm | 30 mm x 30 mm | 15 mm x 15 mm | 21 mm x 21 mm | ||
| Additional Details | ||||||
ステッピングモーターステージ
こちらの移動ステージは脱着型あるいは内蔵型のステッピングモータを用いており、また300 mmまでの長い移動量が可能です。ステージの多くは多軸構成(PLSXY)や、多軸ステージ(PLSX、LNRシリーズ、NRTシリーズ、LTSシリーズ)への組み込みが可能です。ステージMLJ150/Mは高荷重にも対応する垂直移動ステージです。
| Stepper Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | PLSX with and without PLST(/M) Top Plate 1" Stage | PLSXY with and without PLST(/M) Top Plate 1" Stage | LNR Series 25 mm Stage | LNR Series 50 mm Stage | |
| Click Photo to Enlarge |  |  |  |  | |
| Travel | 1" | 25 mm | 50 mm | ||
| Maximum Velocity | 7.0 mm/s | 2.0 mm/s | 50 mm/s | ||
| Possible Axis Configurations | X, XY | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 3" x 3" | 60 mm x 60 mm | 100 mm x 100 mm | ||
| Additional Details | |||||
| Stepper Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | NRT Series 100 mm Stage | NRT Series 150 mm Stage | LTS Series 150 mm Stage | LTS Series 300 mm Stage | MLJ250 50 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 100 mm | 150 mm | 150 mm | 300 mm | 50 mm | |
| Maximum Velocity | 30 mm/s | 50 mm/s | 3.0 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | Z | |||
| Mounting Surface Size | 84 mm x 84 mm | 100 mm x 90 mm | 148 mm x 131 mm | |||
| Additional Details | ||||||
DCサーボモーターステージ
脱着型あるいは内蔵型のDCサーボモータを用いた直線移動ステージをご用意しております。これらのステージは薄型で、多軸ステージの構築が可能です。
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | MT Series 12 mm Stages | PT Series 25 mm Stages | MTS Series 25 mm Stage | MTS Series 50 mm Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 12 mm | 25 mm | 25 mm | 50 mm |
| Maximum Velocity | 2.6 mm/s | 2.4 mm/s | ||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 61 mm x 61 mm | 101.6 mm x 76.2 mm | 43 mm x 43 mm | |
| Additional Details | ||||
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | M30 Series 30 mm Stage | M30 Series 30 mm Monolithic XY Stage | M150 Series 150 mm XY Stage | KVS30 30 mm Vertical Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 30 mm | 150 mm | 30 mm | |
| Maximum Velocity | 2.4 mm/s | X-Axis: 170 mm/s Y-Axis: 230 mm/s | 8.0 mm/s | |
| Possible Axis Configurations | X, Z | XY, XZ | XY | Z |
| Mounting Surface Size | 115 mm x 115 mm | 272.4 mm x 272.4 mm | 116.2 mm x 116.2 mm | |
| Additional Details | ||||
ダイレクトドライブステージ
こちらの薄型ステージにはブラシレスDCサーボモータが内蔵されており、バックラッシュの無い高速移動が可能です。電源が入ってないときは、ステージのプラットフォームにはほとんど慣性が無く、実質的にフリーラン状態になります。そのため電源が入ってないときにステージのプラットフォームが定位置に留まる必要のある用途には適していません。これらのステージを垂直方向に取付けることは推奨しません。
| Direct Drive Stages | |||||
|---|---|---|---|---|---|
| Product Family | DDS Series 50 mm Stage | DDS Series 100 mm Stage | DDS Series 220 mm Stage | DDS Series 300 mm Stage | DDS Series 600 mm Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 50 mm | 100 mm | 220 mm | 300 mm | 600 mm |
| Maximum Velocity | 500 mm/s | 300 mm/s | 400 mm/s | 400 mm/s | |
| Possible Axis Configurations | X, XY | X, XY | X | X | |
| Mounting Surface Size | 60 mm x 52 mm | 88 mm x 88 mm | 120 mm x 120 mm | ||
| Additional Details | |||||

 ズーム
ズーム
Click to Enlarge
ミリ規格の1軸ステージの外形図
Click to Enlarge
インチ規格の1軸ステージの外形図
- 1軸および3軸の2種類のステージ
- DCサーボアクチュエータZ912Bにより、1軸あたりの移動量は12 mm
- ステージの積重ねやアクセサリの取付けに必要なアライメントピンが付属(1軸ステージに2本、3軸ステージに4本)
- コントローラおよび電源は別売り
電動1軸移動ステージMT1/M-Z9は1次元での直線移動、3軸移動ステージMT3/M-Z9は3次元での直交移動が可能です。取付け面にはM6タップ穴が7個付いているため、様々なオプトメカニクスを用いたセットアップへの組込みが容易です。このステージは、硬化スチール製のリニアベアリングを採用することで、精密な移動と長寿命を実現しています。
各軸の操作には独立したコントローラと電源が必要です。当社ではモーターコントローラK-Cube™ KDC101のご使用をお勧めしています。その詳細は下記の製品紹介をご覧ください。
アクチュエータZ912Bに付いているモータ用ケーブルの長さは485 mmです。さらに長いケーブルが必要な場合は、延長ケーブルPAA632(2.5 m)のご使用をお勧めします。延長ケーブルについては、このページの下部をご覧ください。

 ズーム
ズーム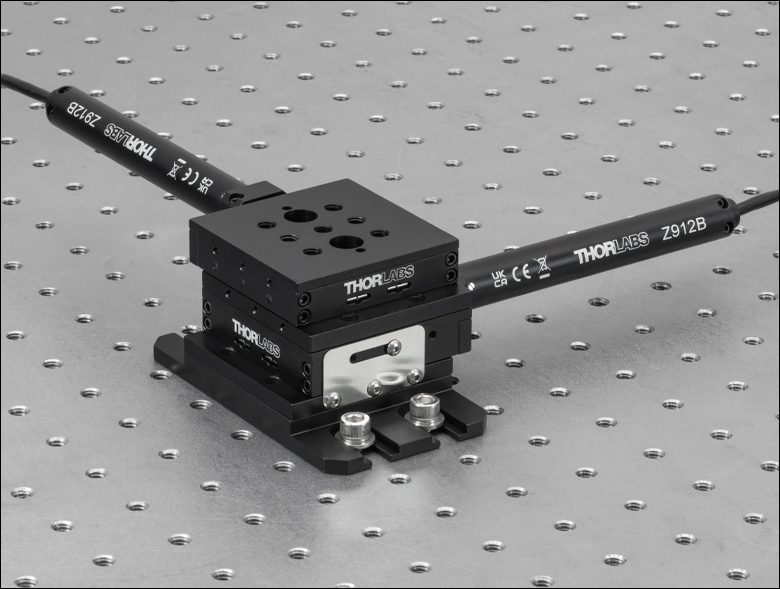
Click to Enlarge
ベースプレートMT401(/M)を使用して、ブレッドボードに2個重ねて取り付けられた単軸ステージMT1(/M)-Z9
- 単軸移動ステージMT1/M-Z9のブレッドボードまたは光学テーブルへの取付け用
- M6取付け穴が4個
- アライメント穴によって平行性を確保
- M6ザグリ穴スロットが4個
ベースプレートMT401/Mは、上記のステージを光学テーブルまたはブレッドボードに取り付ける際、ステージ中央のザグリ穴が利用できない場合に便利です。こちらのベースプレートには間隔が25 mmの取り付けフランジが付いています。単軸ステージの場合、このベースプレートに取り付けられたステージを、取付け穴にアクセスするために移動プラットフォーム上の既存のセットアップを取り外したりせずに、ブレッドボードに取付けることができます。
ベースプレートMT401/Mには、MTシリーズ取付け用にM6キャップスクリュ(5 mm六角)が2個付属しています。ステージMT1/M-Z9に付属する2個のアライメントピンはステージやベースプレートに整合するので、移動軸をプレートに対して平行にすることができます。

 ズーム
ズーム
Click to Enlarge
直角ブラケットMT402を使用してXYZ構成に取り付けた3つの単軸ステージMT1(/M)-Z9
- 移動ステージMT1/M-Z9に垂直に取付け可能
- XY、XZ、XYZステージ構築用に設計
- 直交性を確保するアライメント穴付き
- 取り付けに必要なネジなどのハードウェアが全て付属
直角ブラケットMT402を用いて、単軸移動ステージMT1/M-Z9を垂直面に取付けることにより、XY、XZ、XYZステージを構築することができます。この直角ブラケットには予め穴が加工されており、M6ネジと1/4”-20ネジが各4個付いているのでミリ規格とインチ規格の両方に対応します。ボール(六角)ドライバと六角レンチは別途こちらでご紹介しています。このベースプレートは、3軸ステージMT3/M-Z9に付属しています。
アセンブリの際には、まず移動ステージMT1/M-Z9に付属する2個のアライメントピンをステージのアライメント穴に取付けてください。 次に直角ブラケットのアライメント穴をステージのアライメントピンに合わせてください。 そしてブラケットをM6キャップスクリュで締め付けてください。 これでブラケットの垂直取付け面は移動ステージを水平に(XY用)または垂直に(XZまたはXYZ用)取り付けることができます。 詳しくは、13 mm(1/2インチ)移動ステージMT1シリーズのページ内、「XYZアセンブリ」タブをご覧ください。このページに記載されているアクチュエータは違う種類を使用していますが、アセンブリの方法は全く同じです。

 ズーム
ズーム
Click to Enlarge
アダプタMT405を使用してステージMT1(/M)-Z9の長さを短縮
- MT1/M-Z9の長さを短縮
- 取付け用ネジ(#4-40)が4個付属
側面取付けアクチュエータ用アダプタMT405をお使いいただくと、右図のように、ステージの背面から側面にアクチュエータを移動することができます。 このアダプタは、アクチュエータ用の固定機構が無いステージの側面に取り付け可能です。 これにより、ステージ全体の長さは30 mm短く、幅は18 mm増えます。

 ズーム
ズーム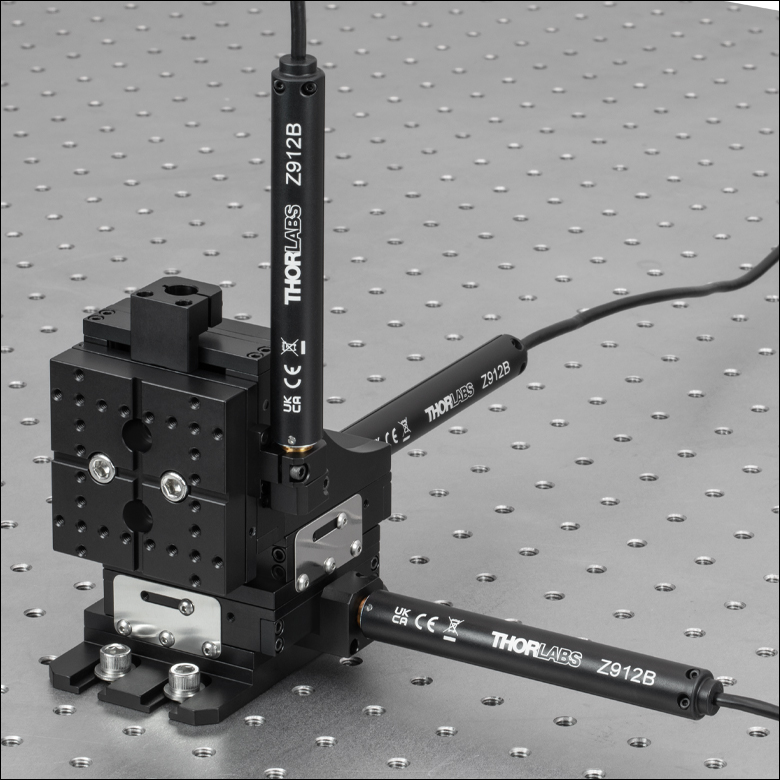
Click to Enlarge
垂直に取り付けられたフレクシャーステージアクセサリ用プレートMT406(/M)
- MT1/M-Z9と共に用いるフレクシャーステージアクセサリ
- 水平性を確保する2個のアライメント用ピンが付属
- M6キャップスクリュが2個付属
フレクシャーステージアクセサリ用アダプタープレートMT406/Mは、当社のフレクシャーステージ用アクセサリの全製品に対応しており、基本的なファイバ入射システムを構築いただくのにお使いいただけます。 2個のM6キャップスクリュでMT1/M-Z9の上部に直接固定することが可能で、M3タップ穴が28個付いています。

 ズーム
ズーム
Click to Enlarge
K-CubeならびにT-Cube™モジュールを取り付けたUSBコントローラーハブKCH601(別売り)。(T-CubeにはアダプタKAP101が必要です。)
- 前面パネルに電動ステージやアクチュエータ制御用の速度ホイールとデジタル表示画面
- 2つの双方向トリガーポート(外部機器からの信号読み取りや外部機器の制御用)
- 付属のUSBケーブルでPCに接続
- Kinesis®ならびにAPT™ソフトウェアに完全対応
- コンパクトな設置面積:60 mm x 60 mm x 49.2 mm
- 電源は付属しません(下記参照)
当社のK-Cubeブラシ付きDCモーターコントローラKDC101は、1台のモータの回転軸を手動またはPCで制御します。上面のコントロールパネルには速度ホイールがあり、位置のプリセットに加えて、順方向ならびに逆方向のジョグ動作と双方向の4段階速度制御が可能です。上面パネルのデジタル表示にはバックライトが付いており、メニュー選択により暗くしたり消灯したりすることが可能です。ユニット前面には双方向のトリガーポートが2つあり、5 Vの外部ロジック信号を読み取ることや、5 Vロジック信号を出力して外部機器を制御することができます。それぞれのポートの機能は独立に設定することができます。
このユニットは当社の新しいKinesisソフトウェアパッケージならびに従来のAPTコントロールソフトウェアに対応します。詳細は「モーションコントロールソフトウェア」のタブをご覧ください。
このコントローラには電源が付属しませんのでご注意ください。対応可能な電源は下記のとおりです。詳細はDCサーボモーターコントローラKDC101の製品紹介ページでご覧ください。

 ズーム
ズーム
Click to Enlarge
電源ユニットKPS201(日本国内向けアダプタと共に発送します)
- 電源(単体)
- KPS201: K-Cubes™ 、T-Cubes™ 用、3.5 mmジャック付き
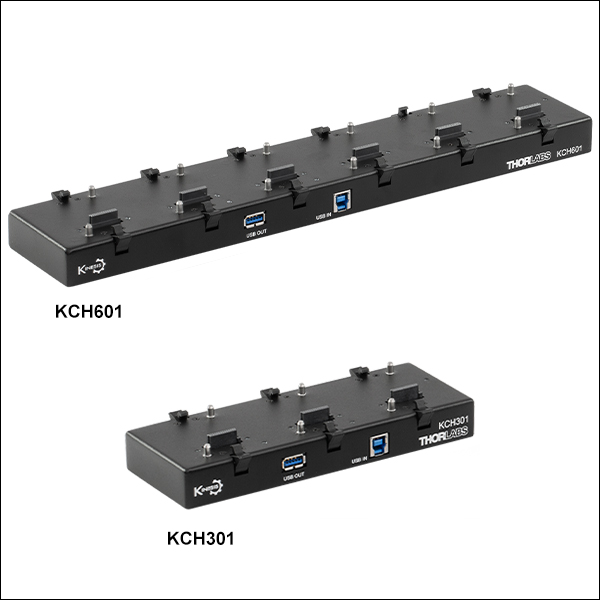
- 電源供給と通信機能を備えたUSBコントローラハブ
- KCH301: 3台までのK-CubeまたはT-Cube用
- KCH601: 6台までのK-CubeまたはT-Cube用
電源KPS201の出力電圧は+15 VDC、最大電流は2.66 Aで、3.5 mmジャックで1台のK-CubeまたはT-Cubeに電力を供給します。標準的な壁コンセントに接続して使用します。
USBコントローラーハブKCH301およびKCH601は次の2つの機能を有しています。1つはハブ機能で、最大3台(KCH301)または6台(KCH601)までのK-CubeまたはT-Cubeをサポートします。もう1つは電源機能で、標準的な壁コンセントに接続するだけで必要な電力の供給を行います。ただし、ハブが供給できる最大電流は10 Aです。お使いになる全Cubeの必要電流が合計で10 A以上にはならないことをお確かめください。 また、このハブに取り付けられたすべてのT-CubeやK-Cubeに対して、1本のUSBケーブルで接続することができます。
USBコントローラハブの詳細は、製品ページをご参照ください。

 ズーム
ズーム延長ケーブルPAA632の長さは2.5 mで、コネクタは当社の電動式アクチュエータ製品すべてに使用できる15ピンD‑サブコネクタです。 オス型のケーブル端はコントローラに、メス型はモータに接続します。