 Products Home
Products Home電動直線移動ステージ(リニアステージ)、移動量25 mm
- 25 mm (0.98") of Travel per Axis
- 1/4"-20 or M6 Tapped Holes for Mounting Standard Optomechanics
- Sold in Single-Axis and XYZ Configurations
PT1-Z9
1-Axis Stage
PT101
Breadboard
Mounting Adapter
PT102
Right-Angle Bracket
PT3-Z9
3-Axis Stage










Please Wait
| Key Specificationsa | |
|---|---|
| Travel Range | 25 mm (0.98") |
| Maximum Speedb | 2.6 mm/s |
| Min Repeatable Incremental Movement | 0.2 µm |
| Uncompensated/Compensated Bidirectional Repeatability | ±7 µm / ±0.8 µm |
| Uncompensated Backlash | 13 µm |
| Horizontal Load Capacity (Max) | 20 lbs (9 kg) |
| Vertical Load Capacity (Max)c | Motor Pushing Down: 7 lbs (3.2 kg) |
| Motor Pushing Up: 10 lbs (4.5 kg) | |
| Included Actuator | Z925B DC Motor |
| Cable Length | 485 mm (1.59 ft) |
| Required Controller | KDC101 |
| Motorized Linear Translation Stages | |
|---|---|
| 12 mm | Standard |
| 25 mm | Compact |
| Standard | |
| TravelMax | |
| 50 mm | Compact |
| Direct-Drive Servo | |
| TravelMax | |
| Long Travel: 100 mm to 300 mm | |
特長
- 移動量:25 mm
- キャリッジにはM6のタップ穴が16個
- ブレッドボード取付け用アダプタや、XY/XZ/XYZ軸構成用のブラケットもご用意
- DCサーボモーターアクチュエータ
自動直線移動ステージ(リニアステージ)は、特定の軸に沿った直線移動を電子制御します。1軸移動ステージPT1/M-Z9は移動量25 mmを1軸に沿って移動し、3軸移動ステージPT3/M-Z9は、3次元移動を可能にします。各ステージには75.0 mm x 50.0 mm内にM6タップ穴が16個配列されているので標準的なオプトメカニクスを取付けることができます。
可動プラットフォームにはアライメントピン用の穴が付いているのでステージを他のステージと積み重ねたり、アクセサリに接続したりするときの直交性が確保できます。水平方向に9 kg、垂直方向に3.2 kg(モータにより押し下げられる構成のとき)、または4.5 kg(モータにより押し上げられる構成のとき)までの荷重は、アクチュエータのインラインの67:1遊星ギアヘッドにより支持されています。3軸ステージPT3/M-Z9の場合は、垂直のアクチュエータにより押し下げられる構成なので、垂直方向の荷重は3.2 kgとなります。 ステージは精密な移動と長寿命のために硬化スチール製のリニアベアリングを使用しています。
取付アダプタとステージの組合せについて
当社では移動ステージPT1/M-Z9を光学テーブルやブレッドボードに取り付けたり、いくつかのステージを組み合わせてXY、XZ、またはXYZステージを構築するためのアダプタープレートやブラケットをご用意しております。アダプタの使用例については下の写真をご覧ください。個々のコンポーネントを組み合わせてXYZ構成を構築する方法は、「XYZアセンブリ」タブをご覧ください。
付属品ならびに対応するアクチュエータについて
付属するDCサーボアクチュエータZ912Bのケーブルの長さは485.0 mmです。移動範囲を制限するスイッチがあり、分解能29 nmのエンコーダが付いています(詳細については「仕様」タブをご覧ください)。このアクチュエータはフレクシャークランプをØ9.5 mm(Ø3/8インチ)バレルに締め付けることによって移動ステージに取付けられています。必要であればZ925Bの代わりに、移動量が25 mmでØ9.5 mm(Ø3/8インチ)バレル付きの手動マイクロメータヘッド、または電動アクチュエータ(ステッピングモータ用アクチュエータなど)が使用可能です。
コントローラ
こちらのステージの操作には当社のモーターコントローラK-Cube™ KDC101が必要です。KDC101は、PCが無くても1軸を制御できます。付属しているソフトウェアKinesis®は、製品到着後PCを用いてすぐにステージの制御が可能で、またLabVIEW、LabWindows、ActiveXなど一般的なプログラミングインターフェイスもサポートしています。KDC101にはUSBケーブルが付属します。対応する電源については下記をご参照ください。
当社では、アクチュエータ内蔵型の電動移動ステージMTS25/M-Z8もご用意しており、全体のパッケージサイズを小さくできます。
| Motor Specifications | |
|---|---|
| Motor Type | DC Servo |
| Cable Length | 0.485 m (1.59 ft) |
| Feedback | Motor Mounted Rotary Encoder |
| Encoder Counts per Lead Screw Revolution | 34,555 |
| Planetary Gear Head Ratio | 67.49:1 |
| Max Recommended Current | 80 mA |
分解能の計算
電動式アクチュエータZ925Bは、モータ 1 回転あたり 512 回のエンコーダーカウント(回転検出)を行います。モータの出力軸はギア比67.49:1の遊星ギアヘッドに取り付けられています。これは1.0 mmピッチの送りネジを1回転させるためにモータを67.49回転させる必要があることを意味しています。送りネジを1.0 mm移動させる場合を考えると、エンコーダの1カウント毎のアクチュエータの直線変位量は以下のように計算できます。
エンコーダーカウント毎のアクチュエータの直線移動距離は以下のようになります。
送りねじ1回転ごとのエンコーダーカウントは、512 x 67.49 = 34,555
そしてエンコーダーカウント毎の送りネジの直線移動距離は
1.0 mm / 34,555 counts = 2.9 x 10-5 mm (29 nm).
| Stage Specifications | |
|---|---|
| Translation | |
| Travel Range | 25 mm (0.98") |
| Uncompensated Backlash | 13 µm |
| Residual Backlash After Compensationa | 0.7 µm |
| Min Repeatable Incremental Movement | 0.2 µm |
| Homing Repeatability | ±9 µm |
| Uncompensated/Compensated Bidirectional Repeatability | ±7 µm / ±0.8 µm |
| Resolution | 29 nm (See Calculation at Right) |
| Motion Parameters | |
| Maximum Speedb | 2.6 mm/s |
| Acceleration (Max) | 4 mm/s2 |
| Load Capacity | |
| Vertical Loadc | Motor Pushing Down: 7 lbs (3.2 kg) |
| Motor Pushing Up: 10 lbs (4.5 kg) | |
| Horizontal Load | Max: 20 lbs (9.0 kg) |
| Straightness | |
| Orthogonality | < 5 mrad |
| Angular Deviation | < 250 µrad |
| Absolute On-Axis Accuracy | < 130 µm |
| Percentage Accuracy (Max) | 0.52% |
| Physical | |
| Dimensions (for Single-Axis Stage) | 9.95" x 3.00" x 0.80" (252.6 mm x 76.2 mm x 20.3 mm) |
電動式アクチュエータZ925Bのピン接続
D型、オス
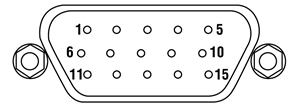
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Ground (Limit and Vcc) | 9 | Resistive Identification |
| 2 | Forward Limit | 10 | 5 VDC |
| 3 | Reverse Limit | 11 | Encoder Channel A |
| 4 | Reserved for Future Use | 12 | Reserved for Future Use |
| 5 | Motor (-) | 13 | Encoder Channel B |
| 6 | Reserved for Future Use | 14 | Pin 2 Identification EEPROM |
| 7 | Motor (+) | 15 | Pin 1 Identification EEPROM |
| 8 | Reserved for Future Use |
PTシリーズの電動式移動ステージはモジュール式設計が採用されているので、2軸や3軸の移動ステージが短時間で組み立てられます。 各ステージには2個の精密位置決めピン(付属)による精確な直交設置により、XY構成(右利き用または左利き用)が可能となります。 下記は3軸XYZ移動マウント(PT3(/M)-Z9)を部品から組み立てる手順の説明です。
Step One
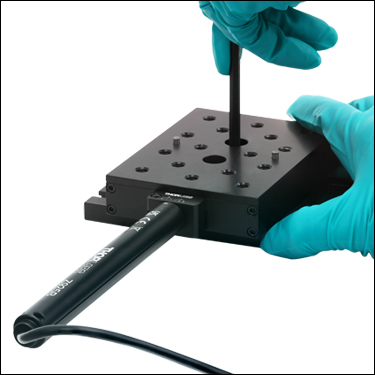
1/8インチのアライメントピン2本をPT101(/M)に差し込み、付属の1/4"-20キャップスクリュを2個使用して移動ステージPT1(/M)-Z9に固定します。 その後、2つ目のステージの直交性を保つため、1/8インチのアライメントピンを2本、所定の穴に差し込みます。
Step Two
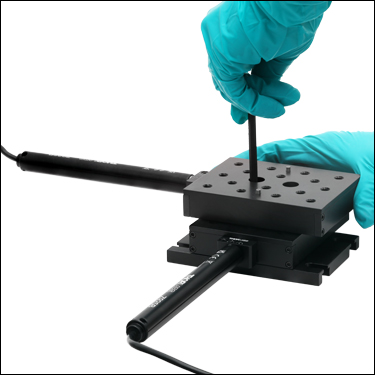
上図のように、2つ目の移動ステージPT1(/M)-Z9を直交の位置関係として、2個の1/4"-20 (M6)キャップスクリュを用いて取り付けます。 その後、直角ブラケットの位置決め用に1/8インチのアライメントピンを2ヶ所の穴に差し込みします。
Step Three

上図のように、直角ブラケットPT102(/M)を移動ステージPT1(/M)-Z9に2個の1/4"-20 (M6)キャップスクリュを用いて取り付けます。 その後、2本の1/8インチのアライメントピンを直角ブラケットの前面の穴に差し込み、最後の3つ目のステージの位置決めを行います。
Step Four

次に3つ目の移動ステージPT1(/M)-Z9を直角ブラケットPT102(/M)の前面に2個の1/4"-20 (M6)キャップスクリュを用いて取り付けます。
当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
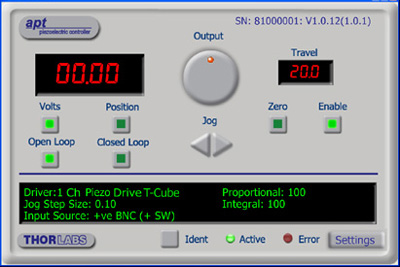
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.47
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
| Posted Comments: | |
Christopher Schnaitmann
(posted 2019-10-21 18:08:02.54) Dear Sir or Madam,
is this stage compatible with the Sutter MP-285 Controller and what is the expected min achievable incremental movement in this configuration?
Kind regards,
Christopher Schnaitmann rmiron
(posted 2019-10-23 04:15:05.0) Response from Radu at Thorlabs: Hello Christopher. The short answer is no. From what I can see on Sutter's website, MP-285 is a stepper motor controller. PT1-Z8/M uses a brushed DC servo motor. Consequently, it requires very different drive electronics. Mike Lin
(posted 2019-10-05 11:37:36.747) 1.Does this product have CE certification?
2.Does Thorlab have agent in Taiwan? AManickavasagam
(posted 2019-10-08 04:47:01.0) Response from Arunthathi at Thorlabs: Thanks for your query. Yes, we do have CE certificaton. We do not have an agent but we do support and ship to Taiwan. If required please contact techsupport@thorlabs.com for further assistance. user
(posted 2019-08-12 06:25:58.077) I want to buy this motorized 2D linear stage, MTS25-Z8 but I have few concerns, Can it generate triggers for synchronizing with other hardware devices? rmiron
(posted 2019-08-12 12:23:04.0) Response from Radu at Thorlabs: You can set the stage, from Kinesis, to be in one of 8 different Trigger Out modes. KDC101 can send triggers out when the stage reaches max velocity, when it is in motion, when it passes a point while going forward (or in reverse, or both) or when it reaches the forward limit switch (or the reverse, or both). The trigger polarity can also be set from Kinesis. For more freedom you could also use Kinesis' APIs to set the state of the trigger out port as desired. pallav.kant
(posted 2014-01-31 07:40:48.45) I am looking to make a XY motion using 2 PT1 Z8 translators, but facing issues in creating assembly, can you please explain how to create XY translator assembly using suitable diagrams.
Thanks sharrell
(posted 2014-02-05 08:41:46.0) Response from Sean at Thorlabs: Thank you for your feedback. We have instructions for attaching the manual versions of these stages into XYZ configurations here: http://www.thorlabs.com/newgrouppage9.cfm?objectgroup_id=706, and click on the "XYZ Assembly" tab. We are working to duplicate this content for the motorized stages. jlow
(posted 2012-10-05 08:58:00.0) Response from Jeremy at Thorlabs: We will update the webpage to include more information about the motor. The PT1/M-Z8 uses the Z825B motor, which has a bidirectional repeatability of <1.5µm. You can also find out about other specifications for this motor at http://www.thorlabs.com/NewGroupPage9.cfm?ObjectGroup_ID=1883&pn=Z825B. maarten.van.kampen
(posted 2012-10-05 02:30:44.0) Dear madam/sir,
For most motorized translators a 'bidirectional repeatability' is specified. this is a very useful number, since it will tell me how close I can approximate an absolute position. This product range only specifies a minimum step of 29 nm (calculated), which will be a highly optimistic number.
What is the repeatability of this device series? tcohen
(posted 2012-09-06 15:12:00.0) Response from Tim at Thorlabs to Mixalis: Thank you for contacting us. I would like to go over your measurement setup with you and have contacted you directly to do so. If the stage is not performing to spec we will of course take it in for evaluation and repair. mikeloul
(posted 2012-09-05 14:42:28.0) Dear Sir/Madam,
I had bought some PT1/M-Z8 2-e months ago but I'm encountering some problems concerning the angular deviation. In the space of 0 - 25,4mm the laser beam goes up 1,5mm measured in a distance of 1850mm, which means that the angular deviation is approx 800µrad, instead of <250 µrad that you refer at the specs. The laser beam seems to rise when I move the motors back. Have you noticed something like that?
Best regards
Mixalis |
電動リニアステージ
電動の直線移動ステージとしては、ピエゾ駆動の20 µm移動ステージからダイレクトドライブ方式の600 mm移動ステージまで、様々な最大移動量の製品をご用意しております。ステージの多くは、それらを用いてXY軸やXYZ軸などの多軸ステージを構築することができます。ファイバ結合用としては、多軸ステージのページをご覧ください。標準の電動ステージを用いるよりも精密な調整が可能です。直線移動ステージのほかに、電動の回転ステージおよびゴニオステージもご用意しております。また手動移動ステージもございます。
ピエゾステージ
これらのステージでは、様々な駆動機構にピエゾ素子が組み込まれています。ステージORIC®シリーズでは、「スティック-スリップ」と呼ばれる摩擦特性を利用したピエゾ慣性アクチュエータが用いられており、それにより長い移動距離が得られています。移動ステージNanoflex™シリーズは、手動アクチュエータに加えて標準的なピエゾアクチュエータが用いられています。ステージElliptec®シリーズでは共振ピエゾモータが用いられており、共振に伴うモータ先端の楕円形の動きで可動プラットフォームを押したり引いたりします。Z軸ステージLPS710E/Mにはピエゾ移動に対する機械的な増幅機構が組み込まれており、またそれに適したコントローラが付属しています。
| Piezoelectric Stages | ||||
|---|---|---|---|---|
| Product Family | ORIC® PDXZ1 Closed-Loop 4.5 mm Vertical Stage | ORIC® PD2 Open-Loop 5 mm Stage | ORIC® PDX2 Closed-Loop 5 mm Stage | |
| Click Photo to Enlarge |  |  |  | |
| Travel | 4.5 mm | 5 mm | ||
| Speed | 1 mm/s (Typ.)a | 10 mm/s (Typ. Max)b | 8 mm/s (Typ.)c | |
| Drive Type | Piezoelectric Inertia Drive | |||
| Possible Axis Configurations | Z | X, XY, XYZ | ||
| Mounting Surface Size | 45.0 mm x 42.0 mm | 13 mm x 13 mm | ||
| Additional Details | ||||
| Piezoelectric Stages | |||||
|---|---|---|---|---|---|
| Product Family | ORIC® PD1 Open-Loop 20 mm Stage | ORIC® PD1D Open-Loop 20 mm Monolithic XY Stage | ORIC® PDX1 Closed-Loop 20 mm Stage | ORIC® PD3 Open-Loop 50 mm Stage | |
| Click Photo to Enlarge |  |  | 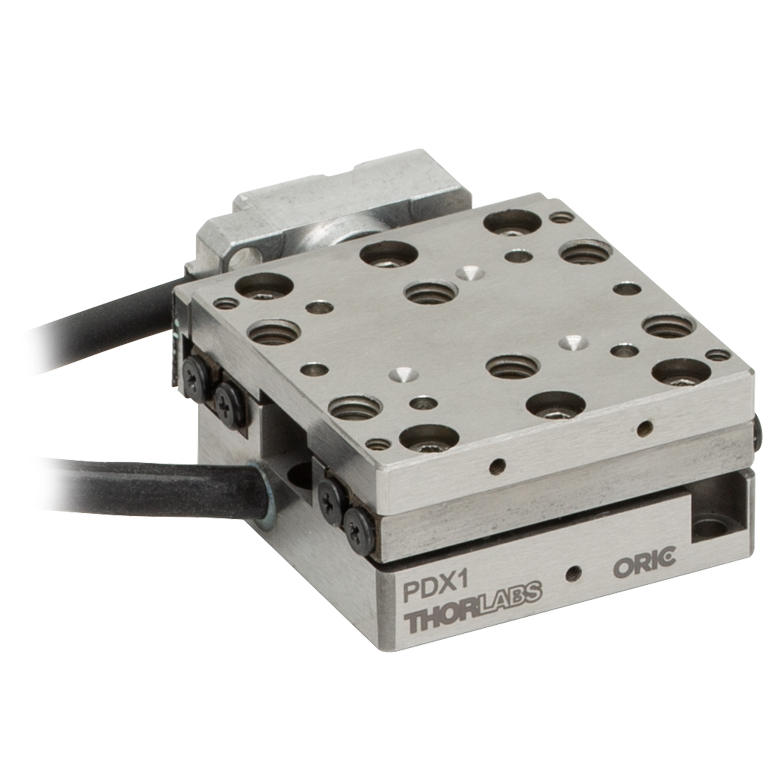 |  | |
| Travel | 20 mm | 50 mm | |||
| Speed | 3 mm/s (Typ. Max)a | 20 mm/s (Typ. Max)b | 10 mm/sc | ||
| Drive Type | Piezoelectric Inertia Drive | ||||
| Possible Axis Configurations | X, XY, XYZ | XY, XYZ | X, XY, XYZ | X, XY, XYZ | |
| Mounting Surface Size | 30 mm x 30 mm | 80 mm x 30 mm | |||
| Additional Details | |||||
| Piezoelectric Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | Nanoflex™ 20 µm Stage with 5 mm Actuator | Nanoflex™ 25 µm Stage with 1.5 mm Actuator | Elliptec® 28 mm Stage | Elliptec® 60 mm Stage | LPS710E 1.1 mm Vertical Stage | |
| Click Photo to Enlarge |  |  | 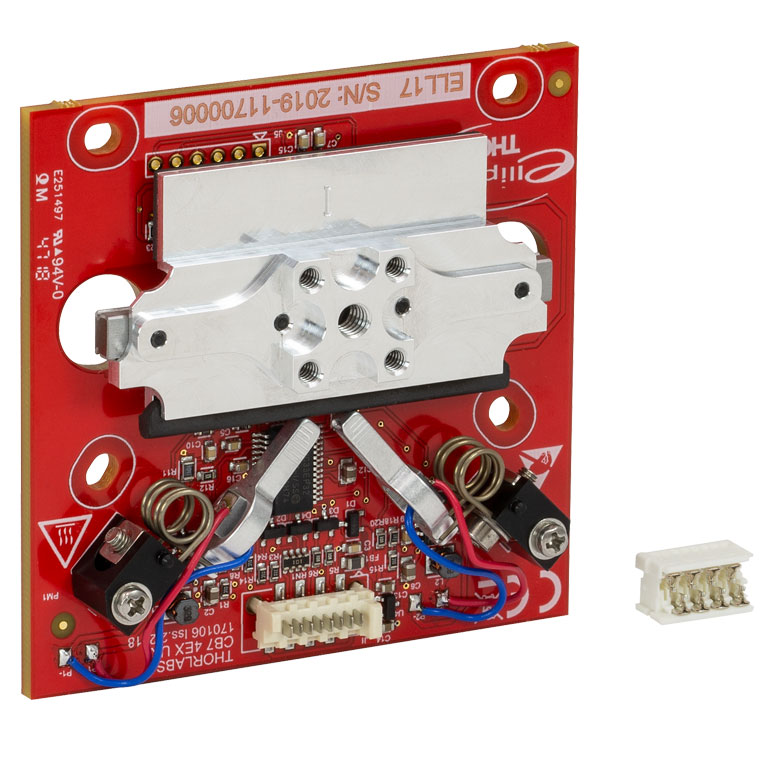 | 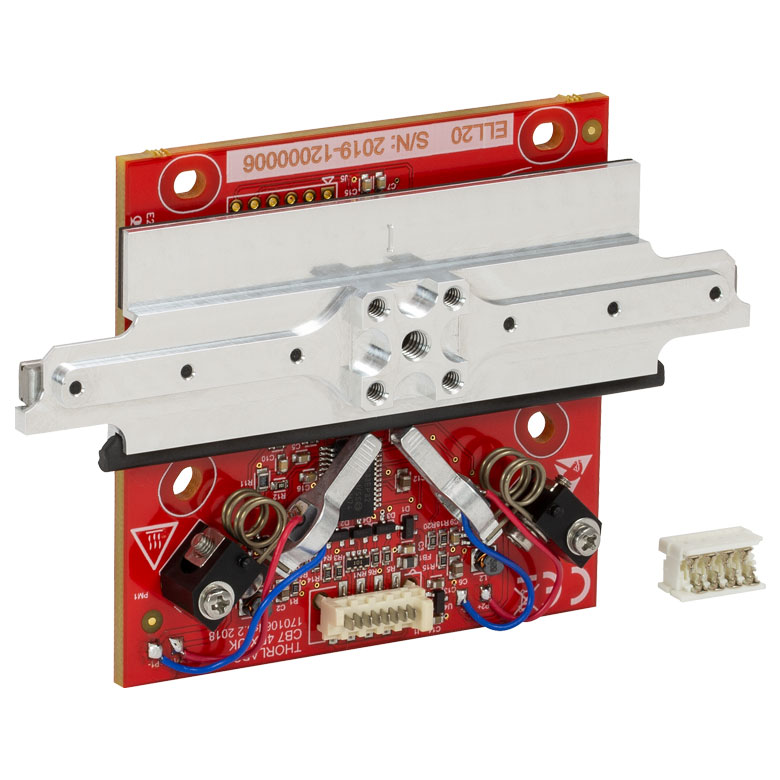 |  | |
| Travel | 20 µm + 5 mm Manual | 25 µm + 1.5 mm Manual | 28 mm | 60.0 mm | 1.1 mm | |
| Maximum Velocity | - | 180 mm/s | 90 mm/s | - | ||
| Drive Type | Piezo with Manual Actuator | Resonant Piezoelectric Motor | Amplified Piezo | |||
| Possible Axis Configurations | X, XY, XYZ | X | Z | |||
| Mounting Surface Size | 75 mm x 75 mm | 30 mm x 30 mm | 15 mm x 15 mm | 21 mm x 21 mm | ||
| Additional Details | ||||||
ステッピングモーターステージ
こちらの移動ステージは脱着型あるいは内蔵型のステッピングモータを用いており、また300 mmまでの長い移動量が可能です。ステージの多くは多軸構成(PLSXY)や、多軸ステージ(PLSX、LNRシリーズ、NRTシリーズ、LTSシリーズ)への組み込みが可能です。ステージMLJ150/Mは高荷重にも対応する垂直移動ステージです。
| Stepper Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | PLSX with and without PLST(/M) Top Plate 1" Stage | PLSXY with and without PLST(/M) Top Plate 1" Stage | LNR Series 25 mm Stage | LNR Series 50 mm Stage | |
| Click Photo to Enlarge |  |  |  |  | |
| Travel | 1" | 25 mm | 50 mm | ||
| Maximum Velocity | 7.0 mm/s | 2.0 mm/s | 50 mm/s | ||
| Possible Axis Configurations | X, XY | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 3" x 3" | 60 mm x 60 mm | 100 mm x 100 mm | ||
| Additional Details | |||||
| Stepper Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | NRT Series 100 mm Stage | NRT Series 150 mm Stage | LTS Series 150 mm Stage | LTS Series 300 mm Stage | MLJ250 50 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 100 mm | 150 mm | 150 mm | 300 mm | 50 mm | |
| Maximum Velocity | 30 mm/s | 50 mm/s | 3.0 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | Z | |||
| Mounting Surface Size | 84 mm x 84 mm | 100 mm x 90 mm | 148 mm x 131 mm | |||
| Additional Details | ||||||
DCサーボモーターステージ
脱着型あるいは内蔵型のDCサーボモータを用いた直線移動ステージをご用意しております。これらのステージは薄型で、多軸ステージの構築が可能です。
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | MT Series 12 mm Stages | PT Series 25 mm Stages | MTS Series 25 mm Stage | MTS Series 50 mm Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 12 mm | 25 mm | 25 mm | 50 mm |
| Maximum Velocity | 2.6 mm/s | 2.4 mm/s | ||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 61 mm x 61 mm | 101.6 mm x 76.2 mm | 43 mm x 43 mm | |
| Additional Details | ||||
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | M30 Series 30 mm Stage | M30 Series 30 mm Monolithic XY Stage | M150 Series 150 mm XY Stage | KVS30 30 mm Vertical Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 30 mm | 150 mm | 30 mm | |
| Maximum Velocity | 2.4 mm/s | X-Axis: 170 mm/s Y-Axis: 230 mm/s | 8.0 mm/s | |
| Possible Axis Configurations | X, Z | XY, XZ | XY | Z |
| Mounting Surface Size | 115 mm x 115 mm | 272.4 mm x 272.4 mm | 116.2 mm x 116.2 mm | |
| Additional Details | ||||
ダイレクトドライブステージ
こちらの薄型ステージにはブラシレスDCサーボモータが内蔵されており、バックラッシュの無い高速移動が可能です。電源が入ってないときは、ステージのプラットフォームにはほとんど慣性が無く、実質的にフリーラン状態になります。そのため電源が入ってないときにステージのプラットフォームが定位置に留まる必要のある用途には適していません。これらのステージを垂直方向に取付けることは推奨しません。
| Direct Drive Stages | |||||
|---|---|---|---|---|---|
| Product Family | DDS Series 50 mm Stage | DDS Series 100 mm Stage | DDS Series 220 mm Stage | DDS Series 300 mm Stage | DDS Series 600 mm Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 50 mm | 100 mm | 220 mm | 300 mm | 600 mm |
| Maximum Velocity | 500 mm/s | 300 mm/s | 400 mm/s | 400 mm/s | |
| Possible Axis Configurations | X, XY | X, XY | X | X | |
| Mounting Surface Size | 60 mm x 52 mm | 88 mm x 88 mm | 120 mm x 120 mm | ||
| Additional Details | |||||

 ズーム
ズーム
Click for Details
ミリ規格の1軸ステージの概略図
Click for Details
インチ規格の1軸ステージの概略図
- 1軸ならびに3軸ステージ
- DCサーボアクチュエータZ925Bの移動量は1軸につき25 mm
- ステージの積み重ねやアクセサリ取付け用のアライメントピンが1軸につき2個付属
- コントローラならびに電源は別売
1軸直線移動の自動ステージPT1/M-Z9と3軸移動ステージPT3/M-Z9は、直線・直交方向に1次元または3次元移動します。M6タップ穴が16個付いているので幅広い種類のオプトメカニクス系に組み込むことが簡単です。ステージは、硬化スチール製リニアベアリングが特長で精密な移動と長寿命が実現します。
PT1/M-Z9は1軸移動用に設計されています。XY軸移動の用途には、PT1/M-Z9を2つお買い求めいただき、直交性を確保するために付属のアライメントピンを利用してステージを積み重ねてください。XYZ軸移動が必要な場合は、3軸移動ステージPT3/M-Z9のご使用をお勧めいたします。移動ステージPT3/M-Z9には、全3軸用のアライメントピンの他にベースプレートPT101/Mならびに直角ブラケットPT102/Mが含まれています。付属のアクセサリの詳細については下記をご覧ください。 各1軸ステージには大きなM6ザグリ穴が2個付いているので、取付アダプタ(下記参照)に直接取り付けることができます。お手持ちのキャップスクリュを使ってブレッドボードに取り付けることも可能です。
各軸の操作には独立したコントローラと電源が必要です。当社のモーターコントローラK-Cube™ KDC101のご使用をお勧めいたします。詳細については下記をご覧ください。
アクチュエータZ925Bに組み込まれている駆動ケーブルの長さは0.485 mです。さらに長いケーブルが必要な場合は、延長ケーブルPAA632(2.5 m)のご使用をお勧めします。延長ケーブルはこのページ下部をご覧ください。

 ズーム
ズーム
Click to Enlarge
ベースプレートPT101(/M)上にXY方向に構成された移動ステージPT1(/M)-Z9

Click to Enlarge
ベースプレートPT101(/M)のザグリ穴によって接続が簡単
- 1軸移動ステージPT1/M-Z9をブレッドボードまたは光学テーブルに取付け用
- 4個のM6ザグリ穴によってインチならびにミリ規格両方に対応
- アライメント穴によって平行性を確保
ベースプレートPT101/MはXY構成またはすでに組立て済みのXYZ多軸構成で、ステージ中央のザグリ穴が使用できない時に利用できます。上記でご案内している1軸移動ステージPT1/M-Z9は、ブレッドボードや光学テーブルに直接取付けることができますが、その際、移動プラットフォームの中心にある2個の内孔を使用しなければなりません。 ベースプレートPT101に移動ステージを取付ければ、移動プラットフォームに組込み済みの部品を取り外すことなくブレッドボードにステージを取付けることができます。 従ってこのベースプレートはXY、XZ、ならびにXYZの多軸構成時の利用にとても便利です。 このベースプレートは3軸ステージPT3/M-Z9に付属しています。
移動ステージの底部とベースプレートは2個のM6キャップスクリュで接続します。 ベースプレートには2個のアライメント穴が付いており、移動ステージPT1/M-Z9に付属するアライメントピンを使用することにより移動軸がプレートに対してしっかりと平行になります。

 ズーム
ズーム
Click to Enlarge
XZ方向に構成された移動ステージPT1(/M)-Z9

Click to Enlarge
移動ステージPT1(/M)-Z9を垂直取付けしたXY構成
- 移動ステージPT1/M-Z9を垂直面に取付け
- XY、XZ、XYZ軸用
- 直交性を確保するアライメント穴付き
直角ブラケットPT102/Mを用いて、1軸移動ステージPT1/M-Z9を垂直面に取付けることにより、XY、XZ、XYZステージを構築することができます。 右には構築例を2つご紹介しています。 このブラケットは3軸移動ステージPT3/M-Z9に付属しています。 この直角ブラケットは、移動量25 mmの手動および電動 のMTシリーズ移動ステージにも対応します。 そのため、異なる移動量のステージでも同じ光学系内に簡単に接続できます。
アセンブリの際には、まず移動ステージPT1/M-Z9に付属する2個のアライメントピンをステージのアライメント穴に取付けてください。 次に直角ブラケットのアライメント穴をステージのアライメントピンに合わせてください。 そしてブラケットをM6キャップスクリュで締め付けてください。 これでブラケットの垂直取付け面は移動ステージを水平に(XY用)または垂直に(XZまたはXYZ用)取付けることができます。 詳細は「XYZアセンブリ」タブをご参照ください。

 ズーム
ズーム
Click to Enlarge
K-CubeならびにT-Cube™モジュールを取り付けたUSBコントローラーハブKCH601(別売り)。(T-CubeにはアダプタKAP101が必要です。)
- 前面パネルに電動ステージやアクチュエータ制御用の速度ホイールとデジタル表示画面
- 2つの双方向トリガーポート(外部機器からの信号読み取りや外部機器の制御用)
- 付属のUSBケーブルでPCに接続
- Kinesis®ならびにAPT™ソフトウェアに完全対応
- コンパクトな設置面積:60 mm x 60 mm x 49.2 mm
- 電源は付属しません(下記参照)
当社のK-Cubeブラシ付きDCモーターコントローラKDC101は、1台のモータの回転軸を手動またはPCで制御します。上面のコントロールパネルには速度ホイールがあり、位置のプリセットに加えて、順方向ならびに逆方向のジョグ動作と双方向の4段階速度制御が可能です。上面パネルのデジタル表示にはバックライトが付いており、メニュー選択により暗くしたり消灯したりすることが可能です。ユニット前面には双方向のトリガーポートが2つあり、5 Vの外部ロジック信号を読み取ることや、5 Vロジック信号を出力して外部機器を制御することができます。それぞれのポートの機能は独立に設定することができます。
このユニットは当社の新しいKinesisソフトウェアパッケージならびに従来のAPTコントロールソフトウェアに対応します。詳細は「モーションコントロールソフトウェア」のタブをご覧ください。
このコントローラには電源が付属しませんのでご注意ください。対応可能な電源は下記のとおりです。詳細はDCサーボモーターコントローラKDC101の製品紹介ページでご覧ください。

 ズーム
ズーム
Click to Enlarge
電源ユニットKPS201(日本国内向けアダプタと共に発送します)
- 電源(単体)
- KPS201: K-Cubes™ 、T-Cubes™ 用、3.5 mmジャック付き
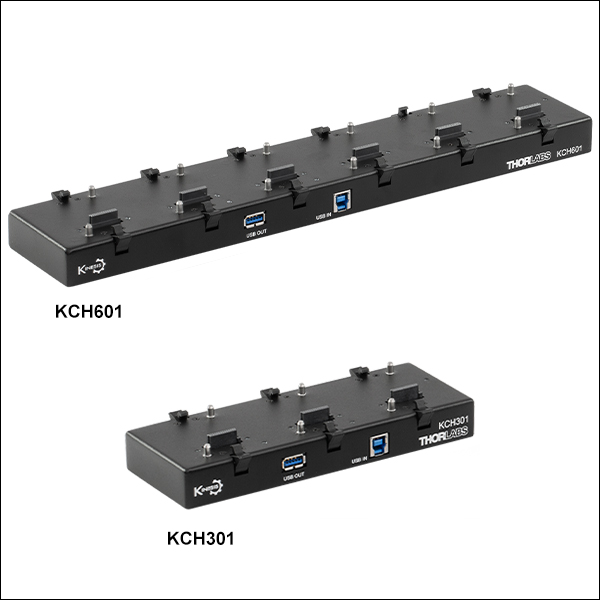
- 電源供給と通信機能を備えたUSBコントローラハブ
- KCH301: 3台までのK-CubeまたはT-Cube用
- KCH601: 6台までのK-CubeまたはT-Cube用
電源KPS201の出力電圧は+15 VDC、最大電流は2.66 Aで、3.5 mmジャックで1台のK-CubeまたはT-Cubeに電力を供給します。標準的な壁コンセントに接続して使用します。
USBコントローラーハブKCH301およびKCH601は次の2つの機能を有しています。1つはハブ機能で、最大3台(KCH301)または6台(KCH601)までのK-CubeまたはT-Cubeをサポートします。もう1つは電源機能で、標準的な壁コンセントに接続するだけで必要な電力の供給を行います。ただし、ハブが供給できる最大電流は10 Aです。お使いになる全Cubeの必要電流が合計で10 A以上にはならないことをお確かめください。 また、このハブに取り付けられたすべてのT-CubeやK-Cubeに対して、1本のUSBケーブルで接続することができます。
USBコントローラハブの詳細は、製品ページをご参照ください。

 ズーム
ズーム延長ケーブルPAA632の長さは2.5 mで、コネクタは当社の電動式アクチュエータ製品すべてに使用できる15ピンD‑サブコネクタです。 オス型のケーブル端はコントローラに、メス型はモータに接続します。