 Products Home / 自動(電動)ステージ / 電動直線移動ステージ(リニアステージ) / 電動直線移動ステージ(リニアステージ):移動量50 mm / 電動直線移動ステージ(リニアステージ)、移動量50 mm、クロスローラーベアリング
Products Home / 自動(電動)ステージ / 電動直線移動ステージ(リニアステージ) / 電動直線移動ステージ(リニアステージ):移動量50 mm / 電動直線移動ステージ(リニアステージ)、移動量50 mm、クロスローラーベアリング電動直線移動ステージ(リニアステージ)、移動量50 mm、クロスローラーベアリング

- 50 mm (1.97") of Travel
- Horizontal Load Capacity of 48 kg (105 lbs)
- Rigid, Durable, Thermally Matched Steel Construction
- Available With or Without an Optical Encoder
LNR502E
Optically Encoded Version
LNR502
Standard Version
LNR50P2
LNR50P3
Mounting Adapters Used to
Create an XYZ TravelMax™
Stage Configuration
ENCLNR50
Stage Position Encoder
Attached to LNR502 Stage
(Each Sold Separately)








Please Wait
| Key Specificationsa | ||
|---|---|---|
| Item # | LNR502(/M) | LNR502E(/M) |
| Travel Range | 50 mm (1.97") | |
| Velocity (Max) | 50 mm/s | |
| Min Achievable Incremental Movementb,c | 0.05 µm | |
| Min Repeatable Incremental Movementb,c | 1 µm | 0.1 µm |
| Bidirectional Repeatabilityd | ±3.9 µm | ±0.75 µm |
| Backlashe | < 6 µm | |
| Horizontal Load Capacity (Max) | 48 kg (105 lbs) | |
| Vertical Load Capacity (Max) | 10 kg (22 lbs) | |
| Included Actuator | DRV250 Stepper Motor | |
| Cable Length | 0.5 m (1.64 ft) | |
| Recommended Controller | Stepper Motor Controllers | |
| Motorized Linear Translation Stages | |
|---|---|
| 12 mm | Standard |
| 25 mm | Compact |
| Standard | |
| TravelMax™ | |
| 50 mm | Compact |
| Direct-Drive Servo | |
| TravelMax | |
| Long Travel: 100 mm to 300 mm | |
特長
- 移動量:50 mm
- 頑丈で熱特性が同一のスチール構造と高耐荷重クロスローラーベアリング
- 可動プラットフォームにはM6タップ穴が13個
- 台形親ネジ付きのステッピングモータではより汚れが少なく、また摩耗の少ない動作が実現
- ブレッドボードやXY/XZ/XYZ軸取付用のアダプタもご用意
- リニアエンコーダ付き、または無しのご提供
移動量50 mmの電動直線移動ステージ(リニアステージ)は、安定な長距離移動かつ高耐荷重の自動ステージが必要な用途向けに設計されています。水平方向の耐荷重は48 kg、垂直方向の耐荷重は10 kgです。ステージの可動プラットフォームにはM6タップ穴が13個あり、標準的なオプトメカニクスが取り付け可能です。
可動プラットフォームにはアライメント用のピン穴が付いているので直交してステージを他のステージと積み重ねたり、アクセサリに接続したりすることができます。頑丈で熱特性が同一のスチール製の構造と高耐荷重クロスローラーベアリングが、精密な動作と長寿命を実現します。
エンコーダ無しの移動ステージLNR502/Mの繰り返し可能な最小移動量は1 µm、双方向再現性は±3.9 µmです。さらに精密な移動が必要な場合にはエンコーダ付きの移動ステージLNR502E/Mもご用意しております。 LNR502/Mにリニアエンコーダを組み合わせたステージで、繰り返し可能な最小移動量は0.1 µm、双方再現性は±0.75 µmと向上します。
エンコーダ(別売り)
光学式エンコーダENCLNR50をエンコーダの付いていない移動ステージLNR502/M(やエンコーダ付きステージLNR502E/M)に取付けることで、1.0 µmの分解能と10.0 µmの確度で位置情報を表示させることができます(単位はミリまたはインチ)。
取付用アダプタならびにステージの組合せ部品
当社ではこれらのステージに様々な部品が柔軟に取り付けられるよう3種類のアダプタープレートをご用意しております。直角ブラケットLNR50P2/MならびにスペーサープレートLNR50P3/Mにより、右手系あるいは左手系のXY、XZ、またはXYZシステムの構築が簡単にできます。ステージとステッピングモーターアクチュエータDRV250が作動する面との干渉を防ぐベースプレートが各ステージに付属します。
付属アクチュエータ
こちらのページの移動ステージにはステッピングモーターアクチュエータDRV250が付属します。微細な位置決めが必要な用途には、ステージのモーターアクチュエータを止める役割を果たす取り外し可能な静的ピンの代わりにピエゾアクチュエータを取り付けることもできます。 標準的なステッピングモーターアクチュエータにピエゾアクチュエータを組み合わせることにより長距離移動と微調整が可能となります。開ループまたは閉ループのピエゾアクチュエータがご提供可能です。どちらも移動量は20 µm~100 µmで、最小分解能は5 nmです。
コントローラの選択
移動ステージLNR502/MならびにLNR502E/Mに付属するステッピングモータには、ステッピングモータ用コントローラBSC201、BSC202、BSC203をお勧めいたします。これらのコントローラは別売りです。
当社では、アクチュエータ内蔵型の電動移動ステージMTS50-Z8もご用意しており、全体のパッケージサイズを小さくできます。
モータの仕様
| Parameter | Value |
|---|---|
| Motor Type | DRV250 2-Phase Stepper Motor |
| Cable Length | 0.5 m (1.64 ft) |
| Maximum Pushing Forcea | 180 N |
| Microsteps per Revolution | 409 600 |
| Leadscrew Pitch | 1.0 mm |
| Limit Switches | Hall Effect |
| Maximum Speed | 50 mm/s |
| Full Step Angle | 1.8° |
| Rated Phase Current | 0.85 A |
| Phase Resistance | 3.6 Ω |
| Phase Inductance | 4.6 mH |
| Holding Torque | 0.2 N•m |
| Rotor Inertia | 24 x 10-7 kg•m2 |
ステージの仕様
| Item # | LNR502(/M) | LNR502E(/M) |
|---|---|---|
| Translation | ||
| Travel Range | 50 mm (1.97") | |
| Bidirectional Repeatabilitya | ±3.9 µm | ±0.75 µm |
| Unidirectional Repeatability | ±1.6 µm | ±0.36 µm |
| Backlashb | < 6 µm | |
| Min Achievable Incremental Movementc,d | 0.05 µm | |
| Min Repeatable Incremental Movementd,e | 1 µm | 0.1 µm |
| Home Location Accuracy | ±1.0 µm | |
| Motion Parameters | ||
| Velocity (Max) | 50 mm/s | |
| Velocity Stability | ±0.4 mm/s | |
| Acceleration (Max) | 50 mm/s2 | |
| Load Capacity | ||
| Vertical Load | Recommended: ≤10 kg (22 lbs) Max: 10 kg (22 lbs) | |
| Horizontal Load | Recommended: ≤25 kg (55 lbs) Max: 48 kg (105 lbs) | |
| Orthogonality | ||
| Pitch | 0.03° (524 µrad) | |
| Yaw | 0.015° (262 µrad) | |
| Bidirectional Accuracy | 35 µm | 6 µm |
| Physical | ||
| Dimensionsf | 10.49" x 5.39" x 2.01" (266.7 mm x 136.8 mm x 51.0 mm) | |
| Weight | 2.8 kg (6.17 lbs) | 3.1 kg (6.83 lbs) |
お手持ちのコントローラを電動移動ステージTravelMax™にご使用になるときは、下記をご参照ください。
ステッピングモータアクチュエータDRV250のコネクタピン
高密度コネクタDE-15、オス型
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Limit Grounda | 9 | Ident (for Future Use) |
| 2 | CCW Limit Switch | 10 | +5 V |
| 3 | CW Limit Switch | 11 | Reserved for Future Use |
| 4 | Motor Phase B- | 12 | Reserved for Future Use |
| 5 | Motor Phase B+ | 13 | +5 V |
| 6 | Motor Phase A- | 14 | Reserved for Future Use |
| 7 | Motor Phase A+ | 15 | Ground |
| 8 | Reserved for Future Use | - | - |

Click to Enlarge
高密度コネクタDE-15、オス型
ソフトウェア
Kinesisバージョン1.14.52
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Figure 58A KinesisソフトウェアのGUI画面
当社のKinesisソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cube®など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
| Posted Comments: | |
natali s
(posted 2024-11-26 19:04:30.18) Dear representative,
We have combined XY motorized stages attached to LNR50M/M. But we would also like to have on-demand manual translation; I thought of combining two XR50P/M in an XY arrangement. But a little skeptical about the compatibility. Can we attach these manual stages under LNR50M/M.
You can say why don't you go and buy LNR instead of XR, it's due to budgetary concerns. spolineni
(posted 2024-12-12 07:00:19.0) Thank you for contacting us. I will personally reach out to assist you further with your setup and provide recommendations. Hyungchul Park
(posted 2024-08-14 17:48:37.377) We would like to install piezo-drive on LNR502E. Is it possible to purchase it separately and install it by ourselves? or do we have to order it to be pre-installed. And do we need to buy separate controller for that? spolineni
(posted 2024-08-21 05:01:49.0) Thank you for reaching out to us. I will personally contact you to discuss your application and requirements in detail to assist you further. Andrey Kuznetsov
(posted 2024-07-11 17:15:10.23) LNR502E CAD STEP file has a model problem, the motor's actuator tip that holds the ball is an open sheet model, instead of a solid body. Please re-export to fix the problem. spolineni
(posted 2024-07-17 04:35:40.0) Thank you for bringing this to our attention. We appreciate your valuable feedback regarding the issue with the CAD STEP file. The suggested modification will be implemented soon, and the corrected files will be made available. Kresten Yvind
(posted 2021-08-09 07:24:18.253) I have some old LN50SE stages with a BSC102 controller (which have been idle for many years) which I have started to use in encoder mode. Unfortunately they tend to freeze up (often) and then get very warm. Cycling the power on the controller is needed. Any solution to this?
Is it most likely the stages or controller and will new parts be compatible with the older versions? cwright
(posted 2021-08-09 09:33:08.0) Response from Charles at Thorlabs: Thank you for your query. This is most likely due to some incorrect setting, such as the encoder constant constant or selected stage. We will reach out to you to discuss which software is being used and how we can narrow down the source of the issue. Fedor Talantov
(posted 2021-06-15 19:48:14.517) Does the Horizontal and vertical load capacities apply for the stage being hung upside down? i.e. if a load is suspended from it, rather than placed on top of it? cwright
(posted 2021-06-21 08:08:56.0) Response from Charles at Thorlabs: Unfortunately, we have not tested its load capacity in this orientation. With that being said, the vertical load capacity when mounted upside down should be lower than the spec for the upright configuration. The limiting factor is the spring force. When used horizontally, since the bearings are symmetrical and so there is no specification on the bearings for which way is ‘up’, the load capacity should be the same for the conventional orientation vs upside down with a hanging weight. CHEOL HONG MIN
(posted 2021-01-21 00:17:33.41) Can APT user (APT driver) program or Micro-manager be installed with window 2000 OS?
I'd like to use the LNR502 with win 2000 OS, because of the old school microscope operating application. cwright
(posted 2021-01-21 10:12:21.0) Response from Charles at Thorlabs: Thank you for your query. Unfortunately APT was not designed for Windows 2000 OS. I can see from Micromanager's website that they also do not support Windows 2000. You should still be able to communicate with these stages using serial commands listed in the APT communications protocol: https://www.thorlabs.com/Software/Motion%20Control/APT_Communications_Protocol.pdf wenzel.jakob
(posted 2017-12-08 12:56:50.187) Can rigid stands (e.g. MP100) be mounted on top of the TravelMax translation stages? bwood
(posted 2017-12-13 11:15:42.0) Response from Ben at Thorlabs: Thank you for your feedback. The counterbored slots (appropriate for both 2" and 50mm hole spacing) of the MP100 match with four of the holes on the LNR50. Therefore I am pleased to say you can mount a rigid stand on an LNR50. rayotte
(posted 2017-08-25 11:11:50.04) We have been using the LNR50S for several years. It is beginning to squeal now. Is there a recommended or suggested lubrication and application method available? Thanks. bwood
(posted 2017-09-05 10:27:26.0) Response from Ben at Thorlabs: Thank you for your feedback. There are some ways to lubricate the LNR and attached motor. I will be in direct contact with you to identify the cause of the noise, and the appropriate responce. Sdm314
(posted 2017-01-19 11:09:31.643) Is there a minumum velocity for these stages? We are looking for a stage that can reliably move at speeds of 5-100 um/s. bwood
(posted 2017-01-20 04:10:49.0) Response from Ben at Thorlabs: The theoretical minimum velocity is that which can be commanded by our motion control software, that velocity range is achievable. However, at low velocities the motion of any 2 -phase stepper motor will become unstable. As you reduce the velocity of the stage, the movement may seem to microscopically ‘stop-start’ depending on the application’s requirements. This is due to the time between motor phases increasing to produce this ultra-low velocity which consequently leads to the motor stalling if there are torque hotspots, where say the pitch of the leadscrew is not perfect. This will vary between each model as at this slow speed any irregularities in the stage are emphasised. This would also be heavily dependent upon the load employed. ludoangot
(posted 2016-11-17 09:29:32.267) Ben, thank you. You propose the DDSM50 which I had also considered but from its characteristics (direct drive with no inertia) I understood it is not suitable for z-axis translation (I specified a 600g load on the z-axis). I may be mistaken. How to set up / control the DDSM50 for z-axis translation? bwood
(posted 2016-11-17 04:23:23.0) Response from Ben at Thorlabs: Yes, you are correct, direct drive stages are not recommended for z-axis translation. Apologies if my comment caused any confusion. The LNR50S is probably the best option for the specifications you gave, however if you would like to further discuss your requirements it may be more convient if you email me at techsupport.uk@thorlabs.com ludoangot
(posted 2016-11-10 17:20:30.033) The LNR50S fits my requirements in terms of velocity, what absolute position accuracy can I expect from this non-encoded version and why isn't this accuracy not specified (it may be because it can't be guaranteed?)? Also, I don't need 50mm travel, 12~20mm is ample, but your other travelMax (LNR25ZFS) has a velocity of only 2mm/s. In the hope of finding a less expensive solution, do you offer a 12~20mm travel motorized stage with at least a 10mm/s velocity and better than 5um position accuracy (load would be about 600g, in the z-axis)? bwood
(posted 2016-11-11 05:58:22.0) Response from Ben at Thorlabs:Thank you for your question. We specify the absolute on-axis accuracy for the LNR50S as 10µm. From the specifications you have given, I think another option you may want to consider is the DDSM50. This stage offers up to 500 mm/s velocities, ±5µm accuracy and has a 0.9kg load capacity. It can be found on our website here: https://www.thorlabs.hk/newgrouppage9.cfm?objectgroup_id=8535 christopher.jones
(posted 2016-05-06 15:51:36.013) Hello. I am interested in the LNR50 series, esp. LNR50SE/M. Do you stock an adapter plate (or combination) to mount these stages onto your X95 rail system? We use the X95 rail system as a gantry and need to support a sensor with z motion off the gantry crossbar. bwood
(posted 2016-05-09 11:32:28.0) Response from Ben at Thorlabs: Thank you for your question. We have many possible mounting solutions available in this circumstance, and we will be in contact with you directly to discuss your options here. 2yongmoon
(posted 2016-04-02 02:38:51.073) I'm using LNR50S/M with TST101 controller. Since the available power of TST101 is lower than theat of BSC series, sometimes it cause problem at the end of stage(at the maximumly stretched position of spring). But, the steeper actuator(DRV014) make the scarpe of iron at the position, also. So I think it can be solved by smoothing them. So, can I use grease at the part of the contact, or is there some solutions for this problem? msoulby
(posted 2016-04-07 04:15:25.0) Response from Mike at Thorlabs: The DRV014 is a larger motor it requires more power to drive the motor therefore the recommended driver for the DRV014 is the BSC20x benchtop stepper controller. If you use the TST101 with the DRV014 then due to the lower output the controller may not be able to supply enough current to drive the stage correctly especially if the stage is loaded. The sound you are hearing is likely the motor stalling due to the TST101 not being able to supply enough current to drive the motor against the load. As there is less torque available then one possible solution would be to significantly reduce the velocity at which you drive the DRV014 with the TST101. hhj5443
(posted 2014-07-21 12:26:54.54) Hello. I have a question.
I want to do a cyclic test with PDMS.
As you know, this linear translation stage's maximum load is 30kg (nearly 300MPa)
But 2.3~2.5MPa is enough to stretch the PDMS so I think 300MPa seems to be too large for testing PDMS.
So I want to know the minimum load that is sensible. bhallewell
(posted 2014-07-25 05:57:20.0) Response from Ben at Thorlabs: Thank you for your question. The LNR50S range holds no minimum load spec. The stage will function to specification between zero load & the orientation-dependent max load specs outlined. jjurado
(posted 2011-07-12 16:15:00.0) Response from Javier at Thorlabs to ax4solid: Thank you for contacting us. You can certainly use LabVIEW to control the LNR50SE/M stage. Our APT software is built on the ActiveX platform, so it can be imported into LabVIEW without the need for drivers. The installation package also contains tutorial videos, a help file with method descriptions, and basic, intermediate, and advanced sample vi's. We also offer a guide for programming the APT software in LabVIEW, which you can find in the BSC101 controller page: http://www.thorlabs.com/NewGroupPage9.cfm?ObjectGroup_ID=1704 (click on the APT Tutorials Tab)
I will contact you directly for further support. ax4solid
(posted 2011-07-12 10:44:44.0) Good day,
I would like to inquire about the mentioned device and the controller. I would like to know if Labview could be used to run the controller and if so, would the SDK be provided for use when purchased.
Thank you.
cheers.
Solomon Idinyang jens
(posted 2009-12-15 09:21:08.0) A reply from Jens at Thorlabs: we can customize all of the bundles we show on the web, the price will need to be determined case by case depending on the combination of parts which is required.
We will contact you with a quotation right away. yuhjen_cheng
(posted 2009-12-15 01:41:52.0) Hello, there,
Can you also offer 10% bundle discount
per axis for NRT100 series when bought with
BSC101-103 (like LNR50S does)?
Sincerely,
Yuh-Jen Cheng |
電動リニアステージ
電動の直線移動ステージとしては、ピエゾ駆動の20 µm移動ステージからダイレクトドライブ方式の600 mm移動ステージまで、様々な最大移動量の製品をご用意しております。ステージの多くは、それらを用いてXY軸やXYZ軸などの多軸ステージを構築することができます。ファイバ結合用としては、多軸ステージのページをご覧ください。標準の電動ステージを用いるよりも精密な調整が可能です。直線移動ステージのほかに、電動の回転ステージおよびゴニオステージもご用意しております。また手動移動ステージもございます。
ピエゾステージ
これらのステージでは、様々な駆動機構にピエゾ素子が組み込まれています。ステージORIC®シリーズでは、「スティック-スリップ」と呼ばれる摩擦特性を利用したピエゾ慣性アクチュエータが用いられており、それにより長い移動距離が得られています。当社のモジュール式クイック接続型移動ステージXR25シリーズは、同じ原理で動作するピエゾ慣性アクチュエータPIA25で駆動できます。移動ステージNanoflex™シリーズは、手動アクチュエータに加えて標準的なピエゾアクチュエータが用いられています。ステージElliptec®シリーズでは共振ピエゾモータが用いられており、共振に伴うモータ先端の楕円形の動きで可動プラットフォームを押したり引いたりします。Z軸ステージLPS710E/Mにはピエゾ移動に対する機械的な増幅機構が組み込まれており、またそれに適したコントローラが付属しています。
| Piezoelectric Stages | ||||
|---|---|---|---|---|
| Product Family | ORIC® PDXZ1 Closed-Loop 4.5 mm Vertical Stage | ORIC® PD2 Open-Loop 5 mm Stage | ORIC® PDX2 Closed-Loop 5 mm Stage | ORIC® PDX4 Closed-Loop 12 mm Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 4.5 mm | 5 mm | 12 mm | |
| Speed | 1 mm/s (Typ.)a | 10 mm/s (Typ. Max)b | 8 mm/s (Typ.)c | 15 mm/s (Typ.)a |
| Drive Type | Piezoelectric Inertia Drive | |||
| Possible Axis Configurations | Z | X, XY, XYZ | ||
| Mounting Surface Size | 45.0 mm x 42.0 mm | 13.0 mm x 13.0 mm | 13.0 mm x 23.0 mm | |
| Additional Details | ||||
| Piezoelectric Stages | |||||||
|---|---|---|---|---|---|---|---|
| Product Family | ORIC® PD1 Open-Loop 20 mm Stage | ORIC® PD1D Open-Loop 20 mm Monolithic XY Stage | ORIC® PDX1 Closed-Loop 20 mm Stage | ORIC® PD3 Open-Loop 50 mm Stage | Compact Modular XRN25X 25 mm Stage | Modular XR25X 25 mm Stage | |
| Click Photo to Enlarge |  |  |  |  |  |  | |
| Travel | 20 mm | 50 mm | 25 mm | ||||
| Speed | 3 mm/s (Typ. Max)a | 20 mm/s (Typ. Max)b | 10 mm/sc | ≤3.6 mm/mind | ≤3.6 mm/mind | ||
| Drive Type | Piezoelectric Inertia Drive | ||||||
| Possible Axis Configurations | X, XY, XYZ | XY, XYZ | X, XY, XYZ | X, XY, XYZ | X, XY, YZ, XZ, XYZ | ||
| Mounting Surface Size | 30.0 mm x 30.0 mm | 80.0 mm x 30.0 mm | 85.0 mm x 50.7 mm | 110.0 mm x 75.7 mm | |||
| Additional Details | |||||||
| Piezoelectric Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | Nanoflex™ 20 µm Stage with 5 mm Actuator | Nanoflex™ 25 µm Stage with 1.5 mm Actuator | Elliptec® 28 mm Stage | Elliptec® 60 mm Stage | LPS710E 1.1 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 20 µm + 5 mm Manual | 25 µm + 1.5 mm Manual | 28.0 mm | 60.0 mm | 1.1 mm | |
| Speed | - | 180 mm/s (Max) | 90 mm/s (Max) | - | ||
| Drive Type | Piezo with Manual Actuator | Resonant Piezoelectric Motor | Amplified Piezo | |||
| Possible Axis Configurations | X, XY, XYZ | X | Z | |||
| Mounting Surface Size | 75.0 mm x 75.0 mm | 30.0 mm x 30.0 mm | 15.0 mm x 15.0 mm | 21.0 mm x 21.0 mm | ||
| Additional Details | ||||||
ステッピングモーターステージ
こちらの移動ステージは脱着型あるいは内蔵型のステッピングモータを用いており、また300 mmまでの長い移動量が可能です。これらのステージの多くは多軸移動機能を有していたり(PLSXY)、あるいは多軸ステージを組み立てることが可能であったりします(PLSX、クイック接続型XR25シリーズ、LNRシリーズ、NRTシリーズ、LTSシリーズ)。ステージMLJ150/Mは高荷重にも対応する垂直移動ステージです。
| Stepper Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | MVSN1(/M) 13 mm Vertical Stage | PLS Series 1" Stages | Modular XR25 Series 25 mm Stage | LNR Series 25 mm Stage | LNR Series 50 mm Stage |
| Click Photo to Enlarge |  |  |  |  | 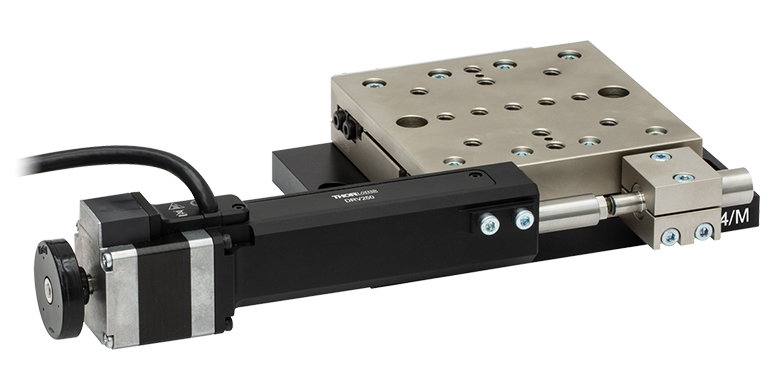 |
| Travel | 13 mm | 1" (25.4 mm) | 25 mm | 25 mm | 50 mm |
| Maximum Velocity | 5.0 mm/s | 7.0 mm/s | 2.0 mm/s | 2.0 mm/s | 50 mm/s |
| Possible Axis Configurations | Z | X, XY | X, XY, YZ, XZ, XYZ | X, XY, XYZ | X, XY, XYZ |
| Mounting Surface Size | 24.5 mm x 50.0 mm | 3" x 3" (76.2 mm x 76.2 mm) | 110.0 mm x 75.7 mm | 60 mm x 60 mm | 100 mm x 100 mm |
| Additional Details | |||||
| Stepper Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | NRT Series 100 mm Stage | NRT Series 150 mm Stage | LTS Series 150 mm Stage | LTS Series 300 mm Stage | MLJ250 50 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 100 mm | 150 mm | 150 mm | 300 mm | 50 mm | |
| Maximum Velocity | 30 mm/s | 50 mm/s | 3.0 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | Z | |||
| Mounting Surface Size | 84 mm x 84 mm | 100 mm x 90 mm | 148 mm x 131 mm | |||
| Additional Details | ||||||
DCサーボモーターステージ
脱着型あるいは内蔵型のDCサーボモータを用いた直線移動ステージをご用意しております。これらのステージは薄型で、多軸ステージの構築が可能です。
| DC Servo Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | MT Series 12 mm Stages | PT Series 25 mm Stages | Compact Modular XNR25X 25 mm Stage | Modular XR25X 25 mm Stage | M30 Series 30 mm Stage | M30 Series 30 mm Monolithic XY Stage |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Travel | 12 mm | 25 mm | 25 mm | 30 mm | ||
| Max Speed | 2.6 mm/s | 2.6 mm/sa | 2.4 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, YZ, XZ, XYZ | X, Z | XY, XZ | ||
| Mounting Surface Size | 61.0 mm x 61.0 mm | 101.6 mm x 76.2 mm | 85.0 mm x 50.7 mm | 110.0 mm x 75.7 mm | 115.0 mm x 115.0 mm | |
| Additional Details | ||||||
| DC Servo Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | MTS Series 25 mm Stage | MTS Series 50 mm Stage | MTS Series 100 mm Stage | M150 Series 150 mm XY Stage | KVS30 30 mm Vertical Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 25 mm | 50 mm | 100 mm | 150 mm | 30 mm |
| Max Speed | 2.4 mm/s | X-Axis: 170 mm/s Y-Axis: 230 mm/s | 8.0 mm/s | ||
| Possible Axis Configurations | X, XY, XYZ | XY | Z | ||
| Mounting Surface Size | 43.0 mm x 43.0 mm | 272.4 mm x 272.4 mm | 116.2 mm x 116.2 mm | ||
| Additional Details | |||||
ダイレクトドライブステージ
こちらの薄型ステージにはブラシレスDCサーボモータが内蔵されており、バックラッシュの無い高速移動が可能です。電源が入ってないときは、ステージのプラットフォームにはほとんど慣性が無く、実質的にフリーラン状態になります。そのため電源が入ってないときにステージのプラットフォームが定位置に留まる必要のある用途には適していません。これらのステージを垂直方向に取付けることは推奨しません。
| Direct Drive Stages | |||||
|---|---|---|---|---|---|
| Product Family | DDS Series 50 mm Stage | DDS Series 100 mm Stage | DDS Series 220 mm Stage | DDS Series 300 mm Stage | DDS Series 600 mm Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 50 mm | 100 mm | 220 mm | 300 mm | 600 mm |
| Maximum Velocity | 500 mm/s | 300 mm/s | 400 mm/s | 400 mm/s | |
| Possible Axis Configurations | X, XY | X, XY | X | X | |
| Mounting Surface Size | 60 mm x 52 mm | 88 mm x 88 mm | 120 mm x 120 mm | ||
| Additional Details | |||||

 ズーム
ズーム
Click to Enlarge
ミリ規格製品の概略図

Click to Enlarge
インチ規格製品の概略図
- ステッピングモータDRV250の移動量:50 mm
- ステッピングモータ用コントローラ使用時の繰り返し可能な最小移動量:1 µm
- 上面にはM6タップ穴13個
- アクセサリ取り付け時に使用する6本のアライメント用位置決めピンが付属
- コントローラは別売
移動ステージTravelMax™ LNR502/Mは、長距離移動ならびに高い耐荷重(水平荷重48 kg)を特長としています。熱特性が同一のスチール製なので、温度環境下においても高い安定性を実現します。多種多様なオプトメカニクスのセットアップに対応するため、100.0 mm x 100.0 mmの可動プラットフォーム上には13個のM6タップ穴があります。下記のアダプタを用いることによってほかのLNR502/Mを積み重ね、XY、XZ、ならびにXYZ構成を作ることもできます。
こちらの電動移動ステージにはステッピングモーターアクチュエータDRV250が内蔵されています。コントローラは別途ご購入いただく必要があります。当社ではご使用いただくことにより最適性能と0.05 µmの最小移動量が得られるステッピングモーターコントローラBSC201、BSC202またはBSC203 をお勧めいたします。
アクチュエータDRV250に組み込まれている駆動ケーブルの長さは0.5 mです。当社のベンチトップ型コントローラがお使いいただけるよう長さ3 mのPAA613ケーブルが付属します。交換用ケーブルも別途ご用意しております(下記参照)。

 ズーム
ズーム
Click to Enlarge
ミリ規格製品の概略図
Click to Enlarge
インチ規格製品の概略図
| Encoder Specifications | |
|---|---|
| Type | Optical Grating Incremental Encoder |
| Resolution | 0.1 µm |
| Bidirectional Repeatability | ±0.75 µm |
| Bidirectional Accuracy | 6 µm |
- ステッピングモータDRV250の移動量:50 mm
- ステッピングモータ用コントローラ使用時の繰り返し可能な最小移動量:0.1 µm
- 上面にはM6タップ穴13個
- アクセサリ取り付け時に使用する6本のアライメント用位置決めピンが付属
- コントローラは別売
電動移動ステージTravelMax™ LNR502E/Mは、電動移動ステージLNR502/M(上記参照)にリニアエンコーダを組み合わせることによって繰り返し可能な最小移動量を1 µmから0.1 µmまで、双方向の再現性を±3.9 µmから±0.75 µmまで向上します。絶対的な位置確度に加えて、安定な長距離移動、かつ高い水平荷重48 kgに耐えられる設計となっております。
上記のLNR502/Mと同様、100.0 mm x 100.0 mmの可動プラットフォームには13個のM6タップ穴があります。下記のアダプタを用いることによってほかのLNR502/Mを積み重ね、XY、XZ、ならびにXYZ構成にすることもできます。
リニアエンコーダによる高分解能を十分活用できる専用のソフトウェアが付属します。このソフトウェアを当社の閉ループステッピングモータ用コントローラBSC201、BSC202、またはBSC203と組み合わせることにより、すぐにご使用いただける状態となります。
移動ステージのリニアエンコーダは、駆動回路に必要なフィードバックが行えるよう、ステージの可動プラットフォームに直接取り付けられています。エンコーダによって絶対位置が直接読み取れるので、バックラッシュに関連する機械的な位置の誤差は考慮する必要はありません。
アクチュエータDRV250に組み込まれている駆動ケーブルの長さは0.5 mです。当社のベンチトップ型コントローラがお使いいただけるよう長さ3 mのPAA613ケーブルが付属します。交換用ケーブルも別途ご用意しております(下記参照)。

 ズーム
ズーム| ENCLNR50 Encoder Kit Specifications | |
|---|---|
| On-Axis Accuracy | 10.0 µm (Typ.) |
| Repeatability | 2.0 µm (Typ.) |
| Resolution | 1.0 µm |
| Power/Data Cable (Included) | 1 m USB Cable, Type A to Micro-B |
| Power Supply (Sold Separately) | ー* |
- LNR50シリーズステージに取り付け可能な光学式位置エンコーダ
- ローカルな手動制御とオンボードのディスプレイでの位置読取りが可能
- USBおよびKinesisソフトウェアを介したリモート制御
- 長さ1 mのUSBケーブルが付属(電源は別売りです*)
ステージ用位置エンコーダENCLNR50は、当社のLNR50シリーズ移動ステージ用に設計されており、1.0 µmの分解能と10.0 µmの確度で位置情報を表示します(単位はミリまたはインチ)。このモジュールはステージに直接取り付ける光学式エンコーダースケールブラケットと、そのブラケットに取り付ける位置読取り用のアセンブリで構成されています。モジュールへの電源供給はUSB mini-Bコネクタを使用します。キットにはUSBケーブル(A to micro-B、長さ1 m)が付属しますが、電源は別売りです*。USB接続は、電源供給以外に、Kinesisソフトウェアを介してステージの位置を表示したりユニットを制御したりするのに使用されます。当社ではXR50シリーズステージ用位置エンコーダENCXR50、およびXR25シリーズステージ用位置エンコーダENCXR25もご用意しております。
エンコーダは、固定プレートが元々取り付けられていた位置と同じ側面(調整ノブとは反対側)に取り付ける必要があります(右の写真参照)。エンコーダを取り付ける前にまず固定プレートを取り外してください。
*5V2A以上のUSB Type-A出力の電源が必要です。ご不明な点がございましたら当社までお問い合わせください。

Click to Enlarge
ステージLNR502(/M)に取り付けられたエンコーダENCLNR50

 ズーム
ズーム
- XY移動ステージ構成用
- 位置決めピン穴が直交性を維持(8つの位置決めピンが付属)
- 寸法(L x W x H):100 mm x 100 mm x 24 mm
XY取付けアダプタLNR50P3/Mは、XY移動ステージの構成のために、直交する2台の移動ステージLNR502/MやLNR502SE/Mの間に必要な間隔を作ります。 アダプタには、M6タップ穴が6つ、位置決めピン穴が4つ、M6キャップスクリュ用のザグリ穴が1つ、Ø7.5 mmの貫通穴が2つあります。 XY構成例については右の写真をご覧ください。 このアセンブリは、取付けアダプタLNR50P3(/M)、ベースプレートLNR50P4(/M)、ならびにLNR50Sシリーズの移動ステージを2つ使用しております。 移動ステージをもう1つと直角ブラケットLNR50P2(/M)(下記参照)をご用意いただければ、XYZ移動ステージを構築することも可能です。ステージとの容易なアライメントのために位置決めピンが付属します。

 ズーム
ズーム
- 移動ステージLNR502/MまたはLNR502E/Mを垂直に取付け
- 位置決めピン穴が直交性を維持(6つの位置決めピンが付属)
- 寸法(L×W×H):108 mm x 88 mm x 134 mm
LNR50P2/Mはアルマイト加工アルミニウム製の直角ブラケットで、移動ステージLNR502/MまたはLNR502E/Mを垂直に配置します。これによりXZならびにXYZの移動ステージの構築が可能です。
LNR50P2/Mの底部にはM6キャップスクリュ用のザグリ穴が6個あり、LNR50シリーズステージの上部に取り付けたり、光学テーブルに直接取り付けることができます。垂直方向の面には2個のM6タップ穴と8個のØ6.6 mmタップ無し貫通穴があります。
右のXYZ軸のアセンブリには直角ブラケットLNR50P2(/M)、アダプタープレートLNR50P3(/M)、ベースプレートLNR50P4(/M)、ならびに移動ステージLNR502(/M)を3つ使用しております。LNR50P4(/M)とLNR50P3(/M)については上記をご覧ください。ステージのアライメントの補助となるよう、ベースプレート、アダプタープレート、直角ブラケットに位置決めピンが付属しています。

 ズーム
ズーム
Click to Enlarge
ベースプレートLNR50P4(/M)に取り付られたステッピングモーターアクチュエータDRV250駆動のLNR50シリーズステージ
- 上記のステージに付属。別売りでもご用意しております。
- 移動ステージと作業台の間に隙間を確保
- 位置決めピン穴が直交性を維持(2つの位置決めピンが付属)
- アルミニウム合金製
ベースプレートLNR50P4/Mは、上記のステージ LNR502/MならびにLNR502E/Mに付属し、ステッピングモータ付きアクチュエータDRV250使用時にステージと作業台の間に隙間を確保します。LNR50P4/Mには7つのザグリ穴スロットがあります。M6タップ穴2つのペアと位置決めピン用の穴2つのペアを使用することにより、ステージを複数の方向に取り付け、アライメントすることができます。位置決めピンは2つ付属しています。

 ズーム
ズーム- 交換用駆動ケーブル
- 長さは1 mと3 mをご用意
この駆動ケーブルは、当社の電動式移動ステージLNR50シリーズに付属している駆動ケーブルPAA613の交換用です。このケーブルは当社のステッピングモーターアクチュエータにもお使いいただけます。オス型のケーブル端はコントローラに、メス型はモータに接続します。