 Products Home
Products Home精密垂直電動ステージ、Kinesis®制御用フトウェア付き

- Vertical Travel Stage with Large Mounting Platform
- Integrated DC Servo Motor and Control Electronics
- Smooth, Repeatable Motion
KVS30
Vertical Translation Stage
The unit features intuitive controls, as well as connection options for PC control and external triggering.











Please Wait
| Key Specificationsa | |
|---|---|
| Travel | 30.0 mm (1.18") |
| Load (Max) | 7.0 kg (15.4 lbs) |
| Velocity (Max) | 8.0 mm/s (All Loads) |
| Pitch Deviation | ±25.8 µrad |
| Roll Deviation | ±21.2 µrad |
| Unidirectional Repeatability | ±0.11 µm |
| Bidirectional Repeatability | ±0.12 µm |
| Stability | ±0.06 µm |
| Platform Dimensions | 116.2 mm x 116.2 mm (4.57" x 4.57") |
| Platform Height | 127.5 mm to 157.5 mm (5.02" to 6.20") |


Click to Enlarge
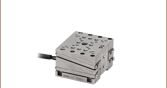
Figure 1.1 完全に伸長した状態のステージKVS30(/M)
特長
- 精密垂直電動ステージ:水平テーブル面が昇降移動
- ±0.12 µmの双方向再現性
- 最小移動量:0.1 µm
- UPおよびDownボタンによる手動制御またはUSBを介したPCによるリモート制御
- I/Oポートを介した双方向の外部トリガ(5 V TTL)
- DCサーボ駆動による滑らかな線形移動
- Kinesis®制御用ソフトウェア一式が付属
- M6およびM4タップ穴が付いた大型の取付プラットフォーム
- 日本国内用の電源が付属
垂直電動ステージKVS30/Mは、駆動回路が内蔵されたDCサーボ駆動の自動ステージです。移動範囲全体にわたり、精密かつ安定性のある高さ調整が可能です。ステージのモータは、ピッチ方向とロール方向の偏差を最小限に抑えながら、116.2 mm x 116.2 mmの大型の取付プラットフォーム上の荷重最大7.0 kg)を移動させることができます。また、クロスローラーベアリングおよびスチールスケールリニアエンコーダにより、高い再現性で正確な位置決めを行うことができます。仕様の詳細については、「仕様」タブをご参照ください。
上部プレートには、光学サブアセンブリを取り付けるためのM6タップ穴が25個、M4タップ穴が16個付いています。ユニットのベース部分には、M6ネジに対応する貫通穴が4つあり、ブレッドボードや光学テーブルに取り付けられるようになっています。貫通穴の間隔はミリ規格とインチ規格の両方のブレッドボードに対応しています。付属のAC電源は100~240 VACで動作します。ユニットの電源コネクタには、コードが偶発的に外れるのを防ぐロック機構が付いています。電源(PSU)をコンセントの差込口に接続する前に、PSUとステージを接続してください。ステージをPC制御するためのUSBケーブルも付属しています。
ローカル制御
モータ出力が可能になっている時に、ユニット側面にあるUPおよびDownボタンを使用してステージの水平テーブル面を昇降移動させることができます。また、閉ループポジション制御機能が無効またはステージの電源がオフになっている時に、同じくユニット側面にある手動式のスクロールホイールを使用して水平テーブル面の高さを調節できます。手動式調整ホイールを使用中に、Kinesisソフトウェア実行中のにステージを接続すると、すべての位置情報がKinesis GUIの位置ウィンドウに反映されます。閉ループの位置制御を有効または無効にするには、UPおよびDownボタンをLEDランプが点滅するまで同時に押し続けるか、ユニットがPC接続されている場合は、Kinesisソフトウェアの設定を変更するかのどちらかの操作を行います。
外部制御
ステージ側面のUSBポートを使用してPC接続し、当社のKinesis®ソフトウェアを使用して制御することができます。このKinesisソフトウェアでは新しい.NETコントロールが使用でき、最新のC#、Visual Basic、LabViewなど、.NET対応言語を使用する開発者がカスタムプログラムを作成することもできます。パラメータ設定はPC上で行い、その後ユニット内の不揮発性メモリに保存できます。設定は次回ユニットが作動したときに自動的に適用されます。詳細については「Kinesisソフトウェア」または「Kinesisチュートリアル」のタブをご覧ください。また、ユニットにある2つのI/Oポートを使用すると、双方向の外部トリガが可能になります。
| Specificationsa | |
|---|---|
| Travel | 30.0 mm (1.18") |
| Unidirectional Repeatability | ±0.11 µm |
| Bidirectional Repeatability | ±0.12 µm |
| Accuracy | 0.9 µm |
| Homing Repeatability | ±0.36 µm |
| Pitch Deviationb | ±25.8 µrad |
| Compliance in Pitchb | 39.0 µrad/N·m |
| Maximum Torque (Pitch)c | 5.0 N·m |
| Roll Deviation | ±21.2 µrad |
| Compliance in Rollb | 19.0 µrad/N·m |
| Maximum Torque (Roll)c | 9.0 N·m |
| Maximum Load | 7.0 kg (15.4 lbs) |
| Maximum Velocity | 8.0 mm/s (All Loads) |
| Maximum Acceleration | 5.0 mm/s2 (All Loads) |
| Minimum Incremental Motiond | 0.1 µm |
| Stability | ±0.06 µm |
| Lead Screw Pitch | 1.0 mm |
| Operating Temperature | 5 to 40 °C |
| Dimensions (W x D x H) at Homed Position | 116.2 mm x 116.2 mm x 127.5 mm (4.57" x 4.57" x 5.02") |
| Weight | 3.4 kg (7.48 lbs) |
| Input Power Requirements | |
| Current | 1 A (Max) |
| Nominal Voltage | 15 VDC |
PC接続
*このUSB3.0のポートにはUSB2.0のMicro-Bタイプコネクタを接続することもできます。その場合は上図の網掛け部分に接続します。ステージKVS30/MにはAタイプ-Micro BタイプのUSB 3.0ケーブルが1本付属します。
I/O 1MMCXメス | I/O 2MMCX メス |
 | |
| +5 V TTL | +5 V TTL |
| これらのコネクタを使用して、入出力信号(5 V TTLレベル)の外部トリガを独立に行うことができます。 | |
| 入力モードの場合、ロジックレベルはTTLに対応し、<0.8 Vでは「低」、>2.4Vでは「高」と認識されます。ポートが未接続の場合、初期設定は「高」となっています。 | |
| 出力モードの場合、ポートは5 Vのプッシュ/プル動作を行い、最大電流リミット値は約8 mAです。 | |
電源
3.15 mmジャックコネクタ
ソフトウェア
Kinesisバージョン1.14.52
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Figure 58A KinesisソフトウェアのGUI画面
当社のKinesisソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cube®など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
Kinesisソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内Kinesis駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
| Posted Comments: | |
Dovlet Seyit
(posted 2024-04-04 08:58:23.103) Hello,
Why this product has way better repeatibliity (0.12microns) than M30XY/M? I thought they have same technology spolineni
(posted 2024-04-10 05:31:47.0) Thank you for your inquiry. The better repeatability of the KVS30 is a result of its unique design and construction, which includes features such as crossed-roller bearings and a high-resolution linear encoder. I will personally contact you to offer more detailed information on this topic. Ludo
(posted 2021-03-11 06:27:52.253) I'll (partially) answer my own question: "can this stage be used with Linux?" It seems that yes (see Charles' answer to feedback from "user" below), but the Kinesis software provided by Thorlabs is only Gate$' Micro$oft compatible. Using this stage with Linux requires the end user to first understand the APT communication protocol (nice from Thorlabs to provide this documentation) and write the code to implement the protocol, adjust PID parameters and perform tests. This prompts a new question: the APT protocol documentation doesn't list the KVS30, which is the equivalent controller one should refer to? cwright
(posted 2021-03-12 11:03:59.0) Response from Charles at Thorlabs: Hello Ludo and thank you for your feedback. I will forward this on and ensure that the command protocol is updated. I will also contact you directly to give you a list of commands which can be used. This is a DC servo driven stage so the commands will typically align with those of the TDC/KDC. Mikkel Bregnhøj
(posted 2020-10-03 03:21:54.373) Dear Thorlabs
Your KVS30/M Z-stage looks to be the perfect platform for reflection SFG measurements, and other multi-beam nonlinear optic techniques where dynamic control of the sample height is essential.
However, the minimal platform height of 12.5 cm is a little too heigh for the physical space on our tightly packed optical table.
Could you consider designing a version that is somewhat lower, but with approx. the same dynamic travel range and specs? One can always raise the platform, but lowering it is impossible.
Kind regards
Mikkel Bregnhøj DJayasuriya
(posted 2020-10-06 08:34:33.0) Hello Mikkel, Thank you for getting in touch with us. Reducing the platform height with the current design would be a bit tricky due to the motor and bearing limits. I will get in touch with you directly top discus your application. user
(posted 2020-02-29 12:53:25.613) Too bad these motorized instruments are not OS agnostic, which means I cannot put it into a system where OS is dictated by DUT. Make your products like the FW102C, built-in FTDI RS232 controller, so I can send text commands from any OS to operate the equipment. cwright
(posted 2020-03-03 06:01:47.0) Response from Charles at Thorlabs: Thank you for your feedback. While this device does not have a dedicated port for such communication, you can control this device with text commands via the RS232 standard.
There are FTDI drivers which allow for interfacing with a virtual COM port, which allows for OS agnostic operation through our communication protocal document. You can view this communications protocol here:
https://www.thorlabs.com/software_pages/ViewSoftwarePage.cfm?Code=Motion_Control |
電動リニアステージ
電動の直線移動ステージとしては、ピエゾ駆動の20 µm移動ステージからダイレクトドライブ方式の600 mm移動ステージまで、様々な最大移動量の製品をご用意しております。ステージの多くは、それらを用いてXY軸やXYZ軸などの多軸ステージを構築することができます。ファイバ結合用としては、多軸ステージのページをご覧ください。標準の電動ステージを用いるよりも精密な調整が可能です。直線移動ステージのほかに、電動の回転ステージおよびゴニオステージもご用意しております。また手動移動ステージもございます。
ピエゾステージ
これらのステージでは、様々な駆動機構にピエゾ素子が組み込まれています。ステージORIC®シリーズでは、「スティック-スリップ」と呼ばれる摩擦特性を利用したピエゾ慣性アクチュエータが用いられており、それにより長い移動距離が得られています。当社のモジュール式クイック接続型移動ステージXR25シリーズは、同じ原理で動作するピエゾ慣性アクチュエータPIA25で駆動できます。移動ステージNanoflex™シリーズは、手動アクチュエータに加えて標準的なピエゾアクチュエータが用いられています。ステージElliptec®シリーズでは共振ピエゾモータが用いられており、共振に伴うモータ先端の楕円形の動きで可動プラットフォームを押したり引いたりします。Z軸ステージLPS710E/Mにはピエゾ移動に対する機械的な増幅機構が組み込まれており、またそれに適したコントローラが付属しています。
| Piezoelectric Stages | ||||
|---|---|---|---|---|
| Product Family | ORIC® PDXZ1 Closed-Loop 4.5 mm Vertical Stage | ORIC® PD2 Open-Loop 5 mm Stage | ORIC® PDX2 Closed-Loop 5 mm Stage | ORIC® PDX4 Closed-Loop 12 mm Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 4.5 mm | 5 mm | 12 mm | |
| Speed | 1 mm/s (Typ.)a | 10 mm/s (Typ. Max)b | 8 mm/s (Typ.)c | 15 mm/s (Typ.)a |
| Drive Type | Piezoelectric Inertia Drive | |||
| Possible Axis Configurations | Z | X, XY, XYZ | ||
| Mounting Surface Size | 45.0 mm x 42.0 mm | 13.0 mm x 13.0 mm | 13.0 mm x 23.0 mm | |
| Additional Details | ||||
| Piezoelectric Stages | |||||||
|---|---|---|---|---|---|---|---|
| Product Family | ORIC® PD1 Open-Loop 20 mm Stage | ORIC® PD1D Open-Loop 20 mm Monolithic XY Stage | ORIC® PDX1 Closed-Loop 20 mm Stage | ORIC® PD3 Open-Loop 50 mm Stage | Compact Modular XRN25X 25 mm Stage | Modular XR25X 25 mm Stage | |
| Click Photo to Enlarge |  |  | 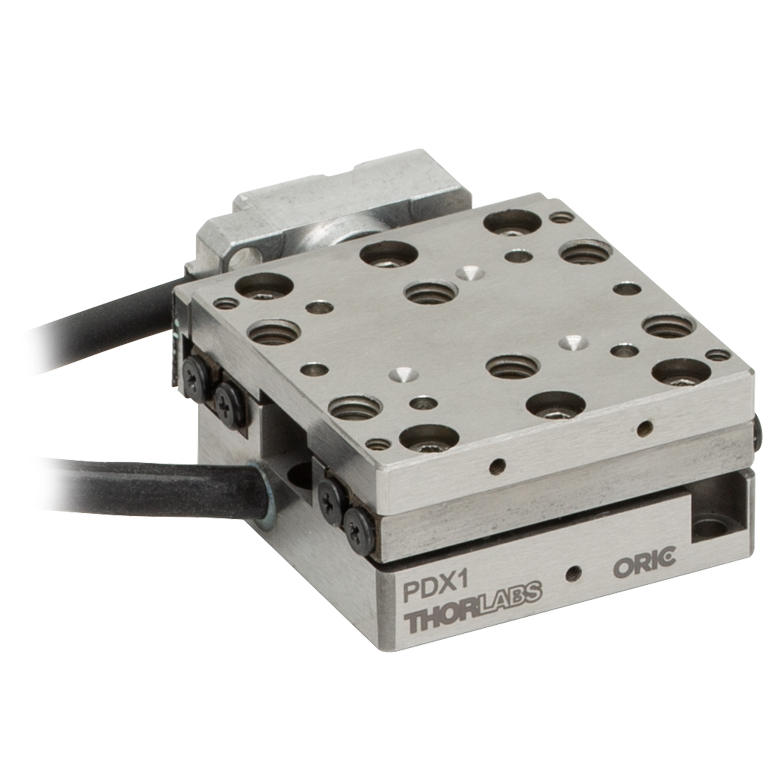 |  |  |  | |
| Travel | 20 mm | 50 mm | 25 mm | ||||
| Speed | 3 mm/s (Typ. Max)a | 20 mm/s (Typ. Max)b | 10 mm/sc | ≤3.6 mm/mind | ≤3.6 mm/mind | ||
| Drive Type | Piezoelectric Inertia Drive | ||||||
| Possible Axis Configurations | X, XY, XYZ | XY, XYZ | X, XY, XYZ | X, XY, XYZ | X, XY, YZ, XZ, XYZ | ||
| Mounting Surface Size | 30.0 mm x 30.0 mm | 80.0 mm x 30.0 mm | 85.0 mm x 50.7 mm | 110.0 mm x 75.7 mm | |||
| Additional Details | |||||||
| Piezoelectric Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | Nanoflex™ 20 µm Stage with 5 mm Actuator | Nanoflex™ 25 µm Stage with 1.5 mm Actuator | Elliptec® 28 mm Stage | Elliptec® 60 mm Stage | LPS710E 1.1 mm Vertical Stage | |
| Click Photo to Enlarge |  |  | 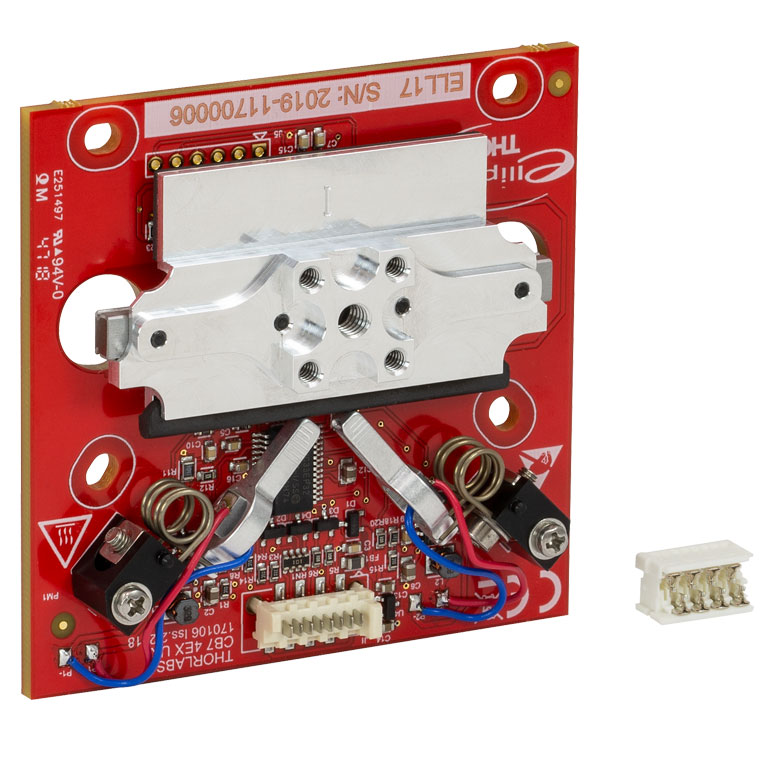 | 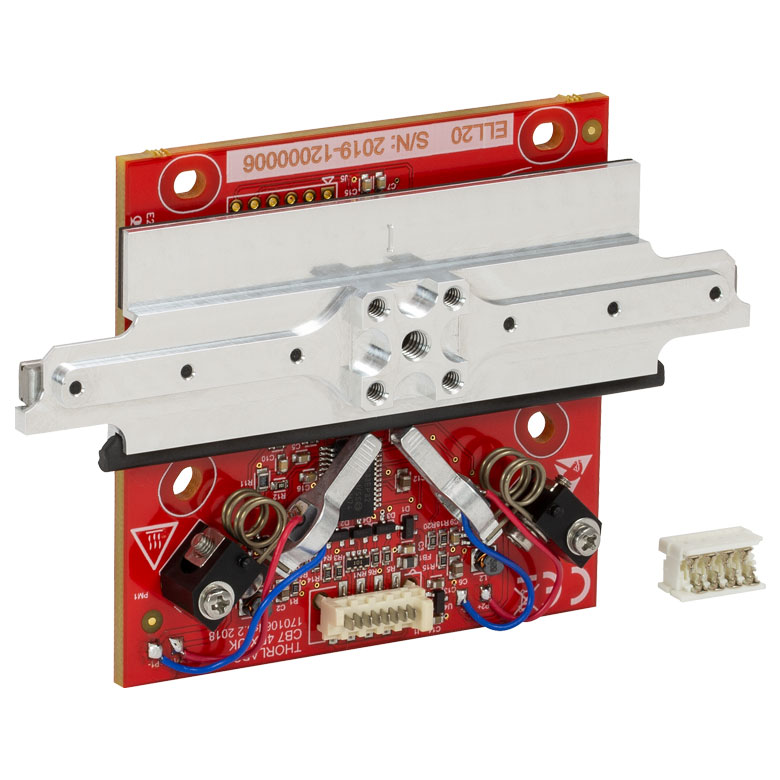 |  | |
| Travel | 20 µm + 5 mm Manual | 25 µm + 1.5 mm Manual | 28.0 mm | 60.0 mm | 1.1 mm | |
| Speed | - | 180 mm/s (Max) | 90 mm/s (Max) | - | ||
| Drive Type | Piezo with Manual Actuator | Resonant Piezoelectric Motor | Amplified Piezo | |||
| Possible Axis Configurations | X, XY, XYZ | X | Z | |||
| Mounting Surface Size | 75.0 mm x 75.0 mm | 30.0 mm x 30.0 mm | 15.0 mm x 15.0 mm | 21.0 mm x 21.0 mm | ||
| Additional Details | ||||||
ステッピングモーターステージ
こちらの移動ステージは脱着型あるいは内蔵型のステッピングモータを用いており、また300 mmまでの長い移動量が可能です。これらのステージの多くは多軸移動機能を有していたり(PLSXY)、あるいは多軸ステージを組み立てることが可能であったりします(PLSX、クイック接続型XR25シリーズ、LNRシリーズ、NRTシリーズ、LTSシリーズ)。ステージMLJ150/Mは高荷重にも対応する垂直移動ステージです。
| Stepper Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | MVSN1(/M) 13 mm Vertical Stage | PLS Series 1" Stages | Modular XR25 Series 25 mm Stage | LNR Series 25 mm Stage | LNR Series 50 mm Stage |
| Click Photo to Enlarge |  |  |  |  | 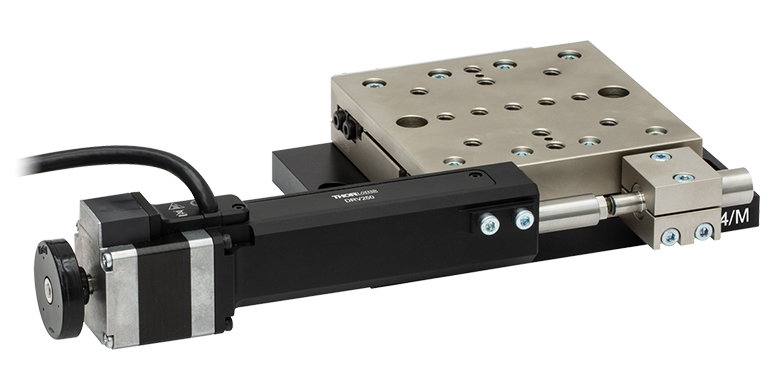 |
| Travel | 13 mm | 1" (25.4 mm) | 25 mm | 25 mm | 50 mm |
| Maximum Velocity | 5.0 mm/s | 7.0 mm/s | 2.0 mm/s | 2.0 mm/s | 50 mm/s |
| Possible Axis Configurations | Z | X, XY | X, XY, YZ, XZ, XYZ | X, XY, XYZ | X, XY, XYZ |
| Mounting Surface Size | 24.5 mm x 50.0 mm | 3" x 3" (76.2 mm x 76.2 mm) | 110.0 mm x 75.7 mm | 60 mm x 60 mm | 100 mm x 100 mm |
| Additional Details | |||||
| Stepper Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | NRT Series 100 mm Stage | NRT Series 150 mm Stage | LTS Series 150 mm Stage | LTS Series 300 mm Stage | MLJ250 50 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 100 mm | 150 mm | 150 mm | 300 mm | 50 mm | |
| Maximum Velocity | 30 mm/s | 50 mm/s | 3.0 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | Z | |||
| Mounting Surface Size | 84 mm x 84 mm | 100 mm x 90 mm | 148 mm x 131 mm | |||
| Additional Details | ||||||
DCサーボモーターステージ
脱着型あるいは内蔵型のDCサーボモータを用いた直線移動ステージをご用意しております。これらのステージは薄型で、多軸ステージの構築が可能です。
| DC Servo Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | MT Series 12 mm Stages | PT Series 25 mm Stages | Compact Modular XNR25X 25 mm Stage | Modular XR25X 25 mm Stage | M30 Series 30 mm Stage | M30 Series 30 mm Monolithic XY Stage |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Travel | 12 mm | 25 mm | 25 mm | 30 mm | ||
| Max Speed | 2.6 mm/s | 2.6 mm/sa | 2.4 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, YZ, XZ, XYZ | X, Z | XY, XZ | ||
| Mounting Surface Size | 61.0 mm x 61.0 mm | 101.6 mm x 76.2 mm | 85.0 mm x 50.7 mm | 110.0 mm x 75.7 mm | 115.0 mm x 115.0 mm | |
| Additional Details | ||||||
| DC Servo Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | MTS Series 25 mm Stage | MTS Series 50 mm Stage | MTS Series 100 mm Stage | M150 Series 150 mm XY Stage | KVS30 30 mm Vertical Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 25 mm | 50 mm | 100 mm | 150 mm | 30 mm |
| Max Speed | 2.4 mm/s | X-Axis: 170 mm/s Y-Axis: 230 mm/s | 8.0 mm/s | ||
| Possible Axis Configurations | X, XY, XYZ | XY | Z | ||
| Mounting Surface Size | 43.0 mm x 43.0 mm | 272.4 mm x 272.4 mm | 116.2 mm x 116.2 mm | ||
| Additional Details | |||||
ダイレクトドライブステージ
こちらの薄型ステージにはブラシレスDCサーボモータが内蔵されており、バックラッシュの無い高速移動が可能です。電源が入ってないときは、ステージのプラットフォームにはほとんど慣性が無く、実質的にフリーラン状態になります。そのため電源が入ってないときにステージのプラットフォームが定位置に留まる必要のある用途には適していません。これらのステージを垂直方向に取付けることは推奨しません。
| Direct Drive Stages | |||||
|---|---|---|---|---|---|
| Product Family | DDS Series 50 mm Stage | DDS Series 100 mm Stage | DDS Series 220 mm Stage | DDS Series 300 mm Stage | DDS Series 600 mm Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 50 mm | 100 mm | 220 mm | 300 mm | 600 mm |
| Maximum Velocity | 500 mm/s | 300 mm/s | 400 mm/s | 400 mm/s | |
| Possible Axis Configurations | X, XY | X, XY | X | X | |
| Mounting Surface Size | 60 mm x 52 mm | 88 mm x 88 mm | 120 mm x 120 mm | ||
| Additional Details | |||||

 ズーム
ズーム
- 30.0 mmの垂直移動
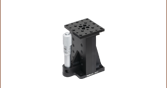
- 最小プラットフォーム高:127.5 mm
- 双方向再現性:±0.12 µm
- 最小移動量:0.1 µm
- UPおよびDownボタンによる手動制御またはUSBを介したPCによるリモート制御
- I/Oポートを介した双方向の外部トリガ(5 V TTL)
こちらの垂直移動ステージは、精密で安定した高さ調節と、滑らかで再現性の高い動作が可能です。116.2 mm x 116.2 mmの大型のプラットフォームにより、最大7.0 kgの荷重を最大速度8.0 mm/sで移動できます。ステージを1番低くした状態での高さは127.5 mmです。
ユニットにはステージを制御するためのUPおよびDownボタンが付いています。閉ループ制御が無効、またはステージの電源がOFFの時、スクロールホイールを使用して手動調整を行うことができます。USBコネクタを介して、Kinesis®制御用ソフトウェア一式を使用したPC制御が可能です。
2つのI/Oポートにより、双方向の外部トリガ(5 V TTL)が可能です。これらのポートに対応するケーブルは下記でご紹介しています。ステージには国内用電源アダプタープラグが付属します。

 ズーム
ズーム- 垂直ステージKVS30/Mのトリガーポート用ケーブル
- MMCXオスとBNCまたはSMAオスコネクタ付き
- 周波数範囲: DC~6 GHz
- インピーダンス:50 Ω
- 最大動作電圧:170 V
ステージKVS30/MのI/Oポートを介して外部トリガを可能にするためのケーブルを2種類ご用意しています。CA3339(長さ1 m)とCA3272(1.8 m)はオス型BNCコネクタ付き、CA3439(長さ1 m)はオス型SMAコネクタ付きです。