 Products Home
Products Home顕微鏡用XYZステージ
- Ideal for use in 3D Imaging Applications
- Z-Axis Resolution: 25 nm
- Low-Profile, Compact Footprint
- Compatible with Cerna®, Nikon, Olympus, and Zeiss Microscopes
Motorized XYZ Scanning
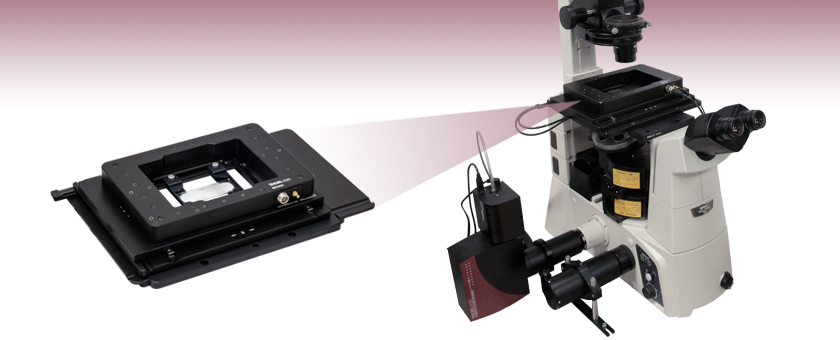
MZS500-E Z-Axis Stage and MLS203-1 XY
Stage Shown with the MZS500P2 Slide Holder
MZS500-E Z-Axis Stage Mounted
to an MLS203-1 XY Microscopy
Stage, Shown Attached to a Nikon
Eclipse Ti-U Microscope














Please Wait

Click to Enlarge
フル構成の走査ステージLPXY1/MZS500-Eと別売りのジョイスティックMJC1、MJC2。ステージLPXY1のフィンガーガードは取り外しています。
特長
- 2種類の薄型XY走査ステージ、移動量110 mm x 75 mm
- 当社のCerna®、およびNikon社、Olympus社、Zeiss社の各顕微鏡に対応する取付けブラケットをご用意
- Z軸はピエゾステージ。垂直移動量:500 µm、分解能:25 nm
- 対応するXY軸走査ステージに取り付けることにより顕微鏡用XYZステージを構成
- 顕微鏡用XYZステージに使用可能な試料ホルダやアクセサリをご用意
顕微鏡用電動式XYZステージシステムMLS203/MZS500-EおよびLPXY1/MZS500-Eは、レーザ走査顕微鏡を含むZ軸スライスや3次元イメージングなどにおいて、3次元位置決め用としてご利用いただけます。MZS500-Eは閉ループのアクティブフィードバック制御を採用し、サブミクロンの繰り返し再現性と25 nmのZ軸分解能を実現しています。そのため、高精度のフォーカス制御が求められる用途に適しています。機能を完備した顕微鏡用電動式XYZステージシステムを構築するには、高速XY走査ステージMLS203または薄型XY走査ステージLPXY1とそれぞれに対応するコントローラ、Z軸ステージMZS500-EM、および適切な取付け用ブラケットが必要です。別売りのZ軸ステージ用アクセサリについては下記の製品紹介をご覧ください。また下表には、それぞれの顕微鏡に適したXYZステージシステムを構築するのに必要なコンポーネントが記載されています。
XY走査ステージ
顕微鏡用XYZステージを構築するためのコンポーネントとして、まずXY走査ステージが必要です。走査ステージMLS203は、Nikon、Olympus、Zeiss製顕微鏡用の手動式ステージを置き換えられる製品として、また当社のCerna顕微鏡にも使用可能な製品として設計されており、顕微鏡試料のXY位置を電動で調整することができます。この小型ステージは高速走査と3.0 µm未満の高い位置決め精度を特長としており、様々な分光法やイメージング技術を用いたアプリケーションにおいて、多様な標本や試料を手動または自動で位置決めするのに適しています。Nikon、Olympus製顕微鏡および当社のCerna顕微鏡用として、薄型XY走査ステージLPXY1もご用意しております。この小型のステージはステッピングモータを使用しているため、高い位置決め安定性を有する最適な低速動作が得られ、顕微鏡でのルーティン的な位置決めに適しています。 走査ステージLPXY1は、高速性が要求されない用途にご使用いただける堅牢でコスト効率が高い製品です。
顕微鏡イメージングシステムにこのステージを組み込む際には、下記のいずれかの取付け用ブラケットをご使用ください。適切なブラケットはご使用の顕微鏡によって異なります。また当社では、一般的なフォトニクス実験やカスタム仕様の顕微鏡のセットアップなどを行う際に、XY走査ステージを光学テーブルやブレッドボード上にボルトで固定するのに便利な、取付け用アダプタもご用意しております。
Z軸ピエゾステージ
Z軸ピエゾステージMZS500-Eは、顕微鏡用XYZステージの構築に必要なもう1つのコンポーネントです。このピエゾ駆動の薄型ステージの移動量は垂直方向(Z軸)に500 µmです。閉ループ用のピエゾコントローラが付属しており、コンピュータ制御によるZ軸位置決めとアクティブな位置のフィー ドバックが可能です。顕微鏡イメージングシステムにXYZステージを組み込む際は、まず付属のキャップスクリュを用いて、このZ軸ステージをXY走査ステージMLS203またはLPXY1に取り付けてください。Z軸ステージMZS500-Eの取付けが可能なXYステージは下表をご覧ください。XYステージを選択したら、顕微鏡イメージングシステムにXYZステージを組み込むために、対応するXYステージ取付け用ブラケットを選択してください。
試料ホルダおよびアクセサリ
当社では顕微鏡スライド、ペトリ皿、マウント済み金属試料などの位置決めができるように、様々なアダプタをご用意しています。ステージMLS203およびLPXY1用にはXY軸ジョイスティックMJC2を、またMZS500ステージ用にはZ軸ジョイスティックMJC1をご用意しています。詳細は下記の製品紹介をご覧ください。
顕微鏡用XYZステージアセンブリのご紹介
| Microscopea | XY Stage / Controller | XY Stage Mounting Bracket | Z-Axis Stageb | Optional Specimen Holders and Accessoriesc |
|---|---|---|---|---|
| Thorlabs Cerna® | MLS203-1 Stage / BBD302 Controllerd or LPXY1 Stage / BSC202 Controller | CSA1000 | MZS500-E | C4SH01: Multi Slide Holder MZS500P2: Slide/Petri Dish Holder MZS500P3: Blank Adapter Plate MZS500P5: 1/4"-20 Tapped Breadboard Plate MZS500P4: M6-Tapped Breadboard Plate MJC2: XY Microscopy Joystick MJC1: Z-Axis Microscopy Joystick |
| Nikon 50i, 80i, 90i, and Ci-L | MLSA06 | |||
| Nikon TE2000 and Eclipse Ti | MLSA03 | |||
| Nikon Eclipse FN1 | MLSA07 | |||
| Olympus BX41, BX43, BX51, and BX61 | MLSA08 | |||
| Olympus IX71, IX73, IX81, and IX83 | MLSA02 | |||
| Olympus IX70 | MLSA09 | |||
| Zeiss Axio Observer and Axiovert 40 | MLS203-2 Stage / BBD302 Controllerd | None Needed | ||
| Optical Breadboard / Custom Configuration | MLS203-1 Stage / BBD302 Controllerd or LPXY1 Stage / BSC202 Controller | MLSA01 or MLSA04 | ||
| MLS203-2 Stage / BBD302 Controllerd | MLSA04 |
コントローラMZS500-E
| Item # | MZS500-E |
|---|---|
| Piezoelectric Output (SMC Male) | |
| Voltage (Software Control) | 0 to 150 VDC |
| Voltage (External Input) | -10 to +10 VDC |
| Current | 500 mA Max Continuous |
| Stability | 100 ppm Over 24 hours (After 30 min Warm-Up Time) |
| Noise | < 3 mV RMS |
| Typical Piezo Capacitance | 1 to 20 µF |
| Bandwidth | 1.0 kHz, Digital Closed Loop |
| Position Feedback (9-Pin D-Type Female) | |
| Feedback Transducer Type | Strain Gauge and Capacitive Compatible |
| Detection Method | AC Bridge (18 kHz Excitation) |
| Typical Resolution | 5 nm (for 20 µm Actuator e.g. PAZ005) |
| Auto-Configure | ID Chip in Stage |
| User Input/Output (15-Pin D-type Female) | |
| 4 Digital Inputs | TTL Levels |
| 4 Digital Outputs | Open Collector |
| Trigger Input/Output | TTL |
| Trigger Input Functionality | Triggered Voltage Ramps/Waveforms |
| Trigger Output Functionality | Trigger Generation During Voltage Ramp Output |
| User 5 V (with Ground) | 250 mA Max |
| Controller Specifications (Main Unit) | |
| Front Panel Controls | |
| Display | 5-Digit, 7-Segment |
| Buttons | Volts/Microns Select, Open/Closed Loop Select, Zero, Resolution |
| Display Brightness | Adjustable |
| Resolution | Switchable Coarse and Fine Adjustment |
| Output | Infinite Turn Precision Digital Potentiometer (Encoder) |
| USB Port | USB 2 Full speed (12Mbps) Compatible |
| Input Power Requirements | |
| Voltage | 85 - 264 VAC |
| Power | 150 W |
| Fuse | 3.15 A |
| General | |
| Dimensions (W x D x H) | 152 mm x 244 mm x 104 mm (6" x 9.6" x 4.1") |
| Weight | 3.18 kg (7 lbs) |
Z軸ステージMZS500-E
| Item # | MZS500-E |
|---|---|
| Drive Voltage | 0 to 150 V |
| Travel | 500 µm |
| Resolution | 25 nm |
| Minimum Step Size | 250 nm Typical |
| Feedback Transducer Type | Capacitive |
| Position Linearity Error | < 0.05% over Full Travel |
| Typical Settling Time for 1 to 100 µm Step | 25 ms Typical |
| Max Travel Bandwidth | 10 Hz |
| Drive Signal Shape | Saw Tooth, Sinusoidal or Square Wave |
| Resonant Frequency (± 10%) | 155 Hz at No Load 130 Hz at 100 g Load 110 Hz at 200 g Load 100 Hz at 250 g Load |
| Maximum Loada | 250 g (0.5 lbs) |
| Tilt Angle | X-Axis: ± 50 µrad Y-Axis: ±30 µrad |
| Operating Temperature | 25° C |
| Dimensions (X, Y, Z)b | 8.9" x 5.9" x 0.98" (226 mm x 150 mm x 25 mm) |
| Weight (with cables, no accessories fitted) | 850 g (1.85 lb) |
| Surface Finish | Black Anodized |
Click to Enlarge
XY走査ステージMLS203とそれに取り付けられたZ軸ステージMZS500-Eの全体外形図
XY走査ステージMLS203
| Item # | MLS203-1/ML203-2 |
|---|---|
| Travel Range | 110 mm x 75 mm (4.3" x 2.95") |
| Speed (Max) | 250 mm/s |
| Acceleration (Max) | 2000 mm/s2 |
| Bidirectional Repeatability | 0.25 µm |
| Unidirectional Repeatability | 0.25 µm |
| Backlasha | N/A |
| Load Capacity (Max)b | 1 kg (2.2 lb) |
| Incremental Movement (Min) | 0.1 µm |
| Absolute On-Axis Accuracy | < 3 µm |
| Percentage Accuracy (Max) | X-Axis: 0.0027% Y-Axis: 0.004% |
| Flatness in X Axis | ±3 µm over full travel, ±1 µm over 10 mm |
| Flatness in Y Axis | ±2 µm over full travel, ±1 µm over 10 mm |
| Home Location Accuracy | 0.25 µm |
| Settling Time within 1 µm (600 g Load) | 0.1 s |
| Settling Time within 0.1 µm (600 g Load) | 0.6 s |
| Weight (Including Cables) | 3.2 kg (7.0 lbs) |
| Limit Switches | X and Y as Standard |
| Bearing Type | Precision Linear Bearing |
| Motor Type | Brushless DC Linear Motor |
| Dimensions (Mid Travel) | 250 mm x 229.3 mm x 31 mm (9.84" x 9.03" x 1.22") |
| Recommended Controller | BBD302 |
コントローラBBD302
| Item # | BBD302 |
|---|---|
| Number of Channels | 2 |
| Drive Connector | 8 Pin DIN, Round, Female |
| Feedback Connector | 15-Pin D-Type, Female |
| Brushless Continuous Output | 2.5 A per Channel, 5 A Max All-Channel Total Output |
| Brushless Peak Output | 4.0 A per Channel, 5 A Max All-Channel Total Output |
| PWM Frequency | 40 kHz |
| Operating Modes | Position and Velocity |
| Control Algorithm | 16-Bit Digital PID Servo Loop with Velocity and Acceleration Feedforward |
| Velocity Profile | Trapezoidal/S-Curve |
| Position Count | 32 Bit |
| Position Feedback | Incremental Encoder |
| Encoder Bandwidth | 2.5 MHz (10 M Counts/sec) |
| Encoder Supply | 5 V |
| AUX Control Connector | 37-Pin D-Type Female (User Digital IO, 5 V O/P) |
| Front Panel Display | 4.3" Full-Color LCD, 480 x 272 Pixels |
| Input Power Requirements | 250 VA Voltage: 100 to 240 VAC Frequency: 47 to 63 Hz Fuse: 3.15 A |
| Dimensions (W x D x H) | 250.0 mm x 279.1 mm x 108.8 mm (9.84" x 10.99" x 4.28") |
| Mass (Weight) | 1.70 kg (3.75 lbs) |
| LPXY1 Stage | |
|---|---|
| Travel Range | 110 mm x 75 mm (4.33" x 2.95") |
| Speed (Max) | 25 mm/s |
| Velocity Stability | < 1.27 mm/s |
| Acceleration (Max) | 400 mm/s2 |
| Bidirectional Repeatability | < ±1.5 µm |
| Unidirectional Repeatability | < ±1.5 µm |
| Minimum Repeatable Incremental Movement | 0.1 µm |
| Calibrated On-Axis Accuracy | < ±5.0 µm |
| Home Location Accuracy | < ±2.5 µm |
| Load Capacity (Max)a | 1 kg (2.2 lb) |
| Pitch Angular Deviation | ±150 µrad |
| Yaw Angular Deviation | ±150 µrad |
| Horizontal Straightness | ±3 µm |
| Vertical Straightness | ±3 µm |
| Limit Switches | X and Y as Standard |
| Bearing Type | High Rigidity Recirculating Precision Linear Bearing |
| Motor Type | Stepper Motor |
| Step Angle | 1.8° (200 Step Motor) |
| Step Accuracy | 5% |
| Microsteps per Full Step | 2048 |
| Microsteps per Revolution of Motor | 409 600 (For 200 Step Motor) |
| Dimensions (Mid Travel, Excluding Guards) | 310.1 mm x 255.6 mm x 32.3 mm (12.21" x 10.06" x 1.27") |
| Weight (Including Cables) | 3.0 kg (6.6 lbs) |
| Recommended Controller | BSC202b |
| BSC202 Controller | |
|---|---|
| Input and Output | |
| Motor Drive Connector (15-Pin, D-Type Female) | 2-Phase Bipolar Motor Drive Output Differential Quadrature Encoder (QEP) Input Forward, Reverse Limit Switch Inputs Encoder 5 V (with Ground) |
| Control IO Connector (15-Pin, D-Type Female) | Jog Forward/Back Input (TTL) User Logic Input/Output (TTL) Single-Ended Analog Input (0 - 10 V) User 5 V (with Ground) 100 mA Max Trigger Input/Output (TTL) |
| Motor Resolution | |
| Microsteps per Full Step | 2048 |
| For 200 Step Motor | 409 600 Microsteps/Rev |
| Motor Drive Voltage | 48 V |
| Motor Drive Power | Up to 50 W (Peak) / 25 W (Average) |
| Motor Speeds | Up to 3000 RPM (200 Full Step Motor) |
| Encoder Feedback Bandwidth | 500 KHz (500 000 Counts/s) |
| Input Power Requirementsa | |
| Voltage | 85-264 VAC |
| Power | 200 W (Peak) |
| Fuse | 3.15 A |
| General | |
| Housing Dimensions (W x D x H) | 240 mm x 360 mm x 133 mm (9.5" x 14.2" x 5.2") |
| Weight | 6.7 kg (14.75 lbs) |
| Compatible Motor Specifications | |
| Peak Powers | 15 to 50 W |
| Average Power | 25 W (Max) |
| Step Angle Range | 20° to 1.8° |
| Coil Resistance (Typical) | 4 - 15 Ω |
| Coil Inductance (Typical) | 4 - 15 mH |
| Rated Phase Currents (Typical) | 0.1 - 1 A |
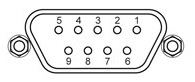
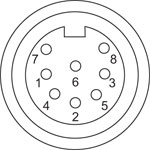
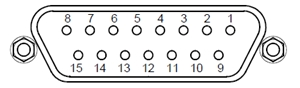
ステージMZS500-Eのピン配列
フィードバック
オス型
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1a | Sine + | 7 | Reserved for Future Use |
| 2a | Sine - | 8 | +15 V Supply |
| 3 | Ground | 9 | -15 V Supply |
| 4 | Reserved for Future Use | 10 | Ground |
| 5b | Position + | 11 | Ground |
| 6b | Position - | 12 | Ground |
アクチュエータ
SMCオス型

0 - 150 V
0 - 500 mA
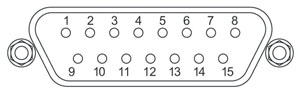
コントローラMZS500-Eのピン配列
歪ゲージ
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Strain Gauge Excitation | 5 | AC Feedback IN |
| 2 | -15 Vouta | 6 | Ground |
| 3 | +15 Vouta | 7 | Actuator ID Signalb |
| 4 | Ground | 8 | Reserved For Future Use |
| 9 | Reserved For Future Use |
I/O
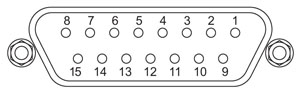
| Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|
| 1 | Digital O/P 1 | 5,9,10 | 9 | Digital Ground | - |
| 2 | Digital O/P 2 | 10 | Digital Ground | ||
| 3 | Digital O/P 3 | 11 | Reserved for Future Use (Trigger OUT) | 5,9,10 | |
| 4 | Digital O/P 4 | 12 | Reserved for Future Use (Trigger IN) | ||
| 5 | Digital Ground | - | 13 | Digital I/P 4 | |
| 6 | Digital I/P 1 | 5,9,10 | 14 | 5 V Supply Output | |
| 7 | Digital I/P 2 | 15 | 5 V Supply Output | ||
| 8 | Digital I/P 3 |
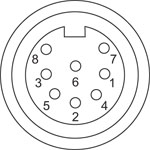
XY走査ステージMLS203のピン配列
モータードライバ
オス型
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase V | 5 | Stage ID |
| 2 | GND | 6 | GND |
| 3 | Thermistor (Not Used) | 7 | Motor Phase W |
| 4 | Motor Phase U | 8 | Enable |
エンコーダーフィードバック
Dタイプオス型
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Reserved for Future Use | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Reserved for Future Use | 11 | Limit Switch - |
| 4 | Encoder Index - | 12 | Encoder Index + |
| 5a | QB - | 13a | QB + |
| 6a | QA - | 14a | QA + |
| 7 | 5 V | 15 | Reserved for Future Use |
| 8 | 5 V |
コントローラBBD302のピン配列
モータードライバ
DINコネクタ、メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase V | 5 | Stage ID |
| 2 | GND | 6 | GND |
| 3 | Temp. Sensor (Not Used) | 7 | Motor Phase W |
| 4 | Motor Phase U | 8 | Enable |
フィードバック
D型コネクタ、メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Not Connected | 11 | Limit Switch - |
| 4 | Index - | 12 | Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7a | 5 V | 15 | Not Connected |
| 8a | 5 V |
ハンドセット
Mini DINコネクタ、メス
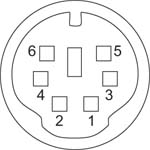
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input) | 4 | Supply Voltage for Handset 5 V |
| 2 | Ground | 5 | TX (Controller Output) |
| 3 | Ground | 6 | Ground |
AUX I/O
D型コネクタ、メス

| Pin | Description | Pin | Description | Pin | Description | Pin | Description |
|---|---|---|---|---|---|---|---|
| 1 | RS232 TX | 11 | User Digital O/P 11+ | 21 | +5 V | 31 | User Digital O/P 4+ |
| 2 | RS232 RX | 12 | User Digital O/P 10- | 22 | User Digital I/P 3 | 32 | User Digital O/P 4- |
| 3 | Ground | 13 | User Digital O/P 10+ | 23 | User Digital I/P 2 | 33 | User Digital O/P 5+ |
| 4 | Differential I/P 2+ | 14 | User Digital O/P 9- | 24 | User Digital I/P 1 | 34 | User Digital O/P 5- |
| 5 | Differential I/P 2- | 15 | User Digital O/P 9+ | 25 | User Digital I/P 0 | 35 | User Digital O/P 6+ |
| 6 | Differential I/P 1- | 16 | User Digital O/P 8- | 26 | User Digital O/P 0 | 36 | User Digital O/P 6- |
| 7 | Differential I/P 1+ | 17 | User Digital O/P 8+ | 27 | User Digital O/P 1 | 37 | Ground |
| 8 | User Digital O/P 12- | 18 | User Digital O/P 7- | 28 | User Digital O/P 2 | - | - |
| 9 | User Digital O/P 12+ | 19 | User Digital O/P 7+ | 29 | User Digital O/P 3 | ||
| 10 | User Digital O/P 11- | 20 | +5 V | 30 | Ground |
USB
USB Type B、メス
I/O
BNCコネクタ、メス
5 V TTL
電動走査ステージLPXY1のピン配列
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | CW Limit Switch |
| 2 | Not Connected | 10 | CCW Limit Switch |
| 3 | Not Connected | 11 | 0 V User |
| 4 | Not Connected | 12 | For Future Use |
| 5 | 5 V User | 13 | For Future Use |
| 6 | Identification | 14 | Motor Phase B+ |
| 7 | Motor Phase B- | 15 | Motor Phase A+ |
| 8 | Motor Phase A- |
各軸用に、それぞれBSC200シリーズコントローラに接続するための15ピンD型コネクタが付いています。
BSC200シリーズコントローラのピン配列
制御I/Oコネクタ
| Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|
| 1 | User 5 V I/O | 9 | 9 | User 0 V | - |
| 2 | Jog Forwardsa | 9 | 10 | Jog Forwardsa | 9 |
| 3 | Not Used | 9 | 11 | Analog Inb | 9 |
| 4 | Trigger In | - | 12 | Trigger Out | 9 |
| 5 | User 0 V | - | 13 | Not Used | 5 |
| 6 | Not Used | - | 14 | Not Used | 6 |
| 7 | Digital (User) In | - | 15 | Digital (User) Out | 9 |
| 8 | Keyed Pin | - |
モータードライブコネクタ
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Encoder A +ve | 9 | CW Limit Switch |
| 2 | Encoder A -ve | 10 | CCW Limit Switch |
| 3 | Encoder B +ve | 11 | 0 V User |
| 4 | Encoder B -ve | 12 | For Future Use |
| 5 | 5 V User | 13 | For Future Use |
| 6 | For Future Use | 14 | Motor Phase B+ |
| 7 | Motor Phase B- | 15 | Motor Phase A+ |
| 8 | Motor Phase A- |
PC接続
USB Type B
A-BタイプのUSBケーブルが付属します。
| Pin | Description |
|---|---|
| 1 | RX (Controller Input) |
| 2 | Ground |
| 3 | Ground |
| 4 | +5V, 100 mA Power Supply |
| 5 | TX (Controller Output) |
| 6 | Ground |
当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.49
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisまたはAPTベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内KinesisまたはAPT駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
| Posted Comments: | |
Ik Hwan Kwon
(posted 2021-09-20 11:20:20.11) Hello,
Our MZS500-E has problem that it couldn't zero-positioning.
When push the Zero positioning button,
The position value is -35.2432 um and Maximum voltage
I thought that this problem comes from positioning sensor calibration (green plate).
But, It doesn't has any feedback even manual file :)
How can I fix this problem? DJayasuriya
(posted 2021-09-21 03:49:30.0) Thank you for your inquiry. We will get in touch with you directly to troubleshoot. jinjie pan
(posted 2021-06-01 10:52:56.903) 我们从你们这里购买了MZS500-E这器材,但是我们自己不小心将其附带的接线弄丢了,还希望你们可以提供一下这个器材和控制器的接线的型号,我们好在购买一下,一根电源线我们型号找到了,但是另一根反馈线我们型号找不到,还希望你们可以提供一下,谢谢,希望得到您的回复。 cwright
(posted 2021-06-02 09:20:55.0) Response from Charles at Thorlabs: Thank you for your query. A member of your local technical support team will reach out to help provide the cables you have misplaced. laura.waller
(posted 2014-01-07 18:47:01.677) We can only get this working with matlab Active X if we use a 32 bit PC. Who uses 32 bits these days?!? Isn't there a 64 bit automation option that will interface with Matlab? msoulby
(posted 2014-01-08 04:36:40.0) Response from Mike at Thorlabs: We are currently developing a 64bit software platform to replace our now old APT software which will be 64bit compatible. We are currently in an alpha test phase but hope to have an advanced beta version in the near future that we can send to customers to use. However you can use direct serial communication over a virtual comm port in order to talk directly to the controller on a 64bit machine. I have contacted you directly with details of the USB communication protocols we use and more details on its use. kelvin.wc.poon
(posted 2013-07-15 15:15:41.773) This is a follow to the question below.
Does the max load for the stage (250g) include the weight of the accessory plates? We have weighed the latter and they are around 200g, leaving only 50g for our samples.
Another concern is the single spring/tension being the only point of contact for the plates. Any rapid XY movement makes the plate shift slightly. Is there a way to improve the stability? pbui
(posted 2013-07-18 11:39:00.0) Response from Phong at Thorlabs: Thank you for your feedback. The absolute weight limit of the stage is 250g, so your sample should be 50g or less. Regarding the stability, as we mention in a note in the manual on page 13, heavier loads may be unstable. We would recommend using a lower acceleration with a profiled stop to avoid this issue. cbrideau
(posted 2013-06-24 21:08:06.623) Does the 250g weight limit of the MZS500 stage include the weight of the inserts such as the MZS500P4? bdada
(posted 2011-11-03 11:33:00.0) Response from Buki at Thorlabs:
We appreciate your interest in our microscopy stages and your positive feedback about our products. We can certainly arrange for you to test our products. We have contacted you to continue this conversation. gcolarus
(posted 2011-11-02 22:39:11.0) Hi,
I am very interested in purchasing your automated microscope stage (both x,y and piezo z) products as well as your filter wheels/shutters.
I notice that they are compatible with Micromanager from the Vale website. However, I can't seem to track down a group that is using your stages with MM.
Can you comment on the compatibility with MM or put me in contact with groups that have these stage components running in their labs with MM? How about Volocity or Metamorph? If possible, we would greatly appreciate a loaner unit and we could prepare a complete report as we have lots of experience with imperfect automated stages (companies shall remain un-named for now).
I am keen because I have been buying different components from Thor and have not been disappointed.
Pina Colarusso
Live Cell Imaging Facility
UCalgary |

 ズーム
ズーム| Key Stage Specificationsa | |
|---|---|
| Travel Range | 110 mm x 75 mm (4.3" x 2.95") |
| Velocity (Max) | 250 mm/s |
| Acceleration (Max) | 2000 mm/s2 |
| Bidirectional Repeatability | 0.25 µm |
| Unidirectional Repeatability | 0.25 µm |
| Horizontal Load Capacity (Max)b | 1.0 kg (2.2 lb) |
| Min Achievable Incremental Movement | 0.1 µm |
| Home Location Accuracy | 0.25 µm |
| Absolute On-Axis Accuracy | < 3 µm |
- 顕微鏡用電動式XYZステージシステム構築のためのXY走査部コンポーネント
- Cerna®顕微鏡のほか、Nikon製、Olympus製、Zeiss製の正立および倒立顕微鏡に組込み可能
- 推奨コントローラ:2軸ブラシレスDCサーボモーターコントローラBBD302(別売り)
- 別売りのジョイスティックMJC2は下でご紹介しております。
- ブラシレスDCリニアサーボモーターアクチュエータを内蔵
- 光学式リニアエンコーダ
- 精密加工された高品質のリニアベアリング
- 優れた再現性(0.25μm)と位置決め精度(<3 µm)
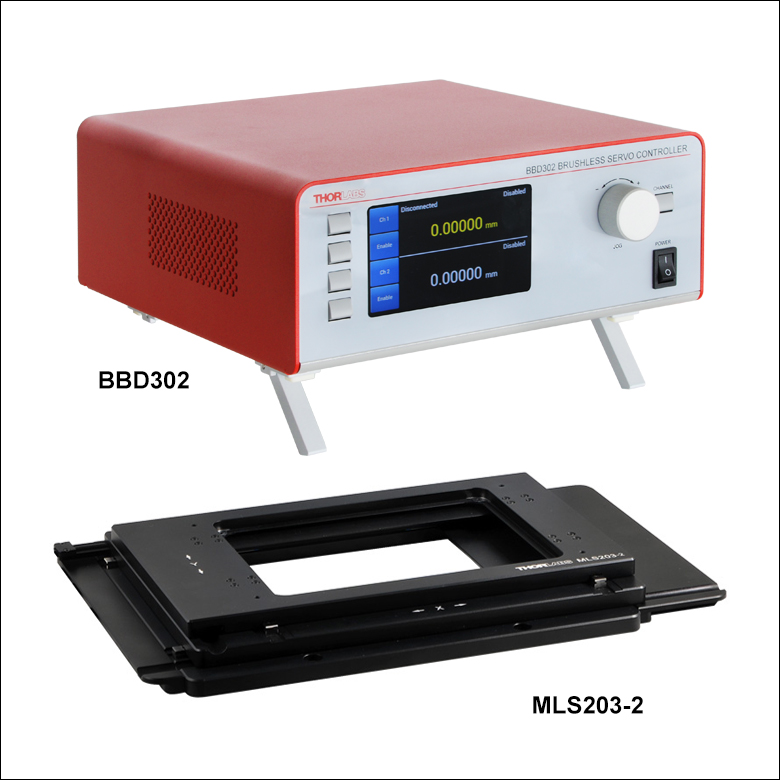
高速走査ステージMLS203は、Z軸ピエゾステージMZS500-Eと組み合わせてXYZステージを構築できるXY走査ステージの一つです。 ステージシステムMLS203/MZS500-Eを使用すると、試料をX、Y、Z軸に沿って高精度に走査できる汎用性の高い3D移動ステージを構築できます。XYステージMLS203-1は、当社のCerna正立顕微鏡のほか、Nikon製やOlympus製の倒立および正立顕微鏡に対応しています。ただし、取付けブラケットが別途必要です(下記参照)。 ステージMLS203 2は、Zeiss製顕微鏡のAxio ObserverおよびAxiovert 40に直接取り付けることができます。取付けブラケットは不要です。なお、XYZステージシステムを構築するためのXY走査ステージとして、薄型走査ステージLPXY1(下記参照)を使用することも可能です。MLS203-1が適合する顕微鏡には、LPXY1も適合します。
XY走査ステージMLS203のコントローラとしては、2チャンネルのコントローラであるBBD202をお勧めします。この製品には当社の制御ソフトウェアKinesis®とプログラミングインターフェイスが付いており、自動顕微鏡システムに簡単に組み込むことができます。このコントローラは、高速動作(数百mm/s)と高いエンコーダ分解能(<100 nm)が求められるアプリケーションに適しています。柔軟性を高めるために、USBまたはRS232インターフェイスによるPCとの通信をサポートしています。
コントローラにはソフトウェア開発キット(SDK)が付属しており、MLS203ステージのPCによる自動制御システムの構築もサポートしています。これは、このステージをほかの顕微鏡の自動制御用アクセサリと組み合わせて動作させることを求められるシステムインテグレータや自動化の専門家にとって大変有用です。SDKはWindowsで動作する主要な開発言語(LabVIEW、C++、MATLAB等)をサポートしており、ActiveXライブラリまたは標準的なダイナミックリンクライブラリ(DLL)の形式で提供されます。USBハブを介して多数のユニットを1台のPCに接続できます。例えば、XYステージMLS203用のコントローラBBD302と、Z軸ステージキットMZS500-Eに付属するコントローラを、1台のPCで制御することができます。ブラシレスDCモーターコントローラの詳しい製品説明はこちらをクリックしてご参照ください。

 ズーム
ズーム| Key Stage Specificationsa | |
|---|---|
| Travel Range | 110 mm x 75 mm (4.3" x 2.95") |
| Velocity (Max) | 25 mm/s |
| Acceleration (Max) | 400 mm/s2 |
| Bidirectional Repeatability | < ±1.5 µm |
| Unidirectional Repeatability | < ±1.5 µm |
| Horizontal Load Capacity (Max)b | 1 kg (2.2 lb) |
| Min Achievable Incremental Movement | 0.1 µm |
| Home Location Accuracy | < ±2.5 µm |
| Calibrated On-Axis Accuracy | < ±5.0 µm |
- 顕微鏡用電動式XYZステージシステム構築のためのXY走査部コンポーネント
- Cerna®顕微鏡のほか、Nikon製、Olympus製の正立および倒立顕微鏡に組込み可能
- 推奨コントローラ:2チャンネルベンチトップ型ステッピングモーターコントローラBSC202(別売り)
- 別売りのジョイスティックMJC2は下でご紹介しております。
- 試料へのアクセスが容易な小型設計
- 精密加工された高品質のリニアベアリング
- 顕微鏡でのルーティン的な位置決めに好適
電動走査ステージLPXY1は、Z軸ピエゾステージMZS500-Eと組み合わせてXYZステージシステムを構築できるXY走査ステージの一つです。走査ステージLPXY1は開ループ制御のステッピングモータを使用しており、低速でXY位置決めを行うことができる、小型で信頼性とコスト効率の高い製品です。Z軸ピエゾステージMZS500-Eと組み合わせて使用すると、試料をX、Y、Z軸に沿って高精度に走査できる汎用性の高い3D移動ステージを構築できます。このステージは、当社のCerna正立顕微鏡のほか、Nikon製やOlympus製の倒立および正立顕微鏡に対応しています。ただし、取付けブラケットが別途必要です(下記参照)。なお、XYZステージシステムを構築するためのXY走査ステージとして、高速走査ステージMLS203を使用することも可能です。
走査ステージLPXY1のコントローラとしては、2チャンネルのベンチトップ型ステッピングモーターコントローラBSC202をお勧めします。このコントローラには、当社の制御ソフトウェアKinesis®とプログラミングインターフェイスが付いており、自動顕微鏡システムに簡単に組み込むことができます。また、USB接続やフル機能のグラフィカルユーザーインターフェイス(GUI)パネルに加え、ユーザを広範にサポートするソフトウェア一式も付属します。これにはすぐに使える多くのユーティリティが含まれており、細かな事前設定などをしなくても直ちに操作を開始することができます。さらに、これには全機能を備えたActiveX®プログラミング環境も含まれており、LabVIEW、C++、MATLABなどの様々なプログラミング環境でカスタム仕様のアプリケーションを開発できるようにサポートしています。 標準的なUSBハブを介して複数のユニットを1台のPCへ接続することができます。例えば、ステージLPXY1用のコントローラBSC202と、Z軸ピエゾステージキットMZS500-Eに付属するコントローラの両方を、1台のPCで同時に操作できます。 コントローラBSC202の詳細は、ベンチトップ型ステッピングモーターコントローラのページをご覧ください。
Click to Enlarge
ブラケットセットMLSA01でブレッドボードに取付けられたステージMLS203-1
当社では、ステージMLS203-1またはLPXY1をNikon製、Olympus製、および当社の正立および倒立顕微鏡に取り付けるためのブラケットをご用意しています。各顕微鏡との適合性については下の表をご参照ください。各ブラケット(CSA1000を除く)には顕微鏡へのステージの取付け方法を記載した説明書が付いています。なお、ステージMLS203-2は、Zeiss製顕微鏡のAxio ObserverおよびAxiovert 40に直接取り付けることができます。取付けブラケットは不要です。
また、自作の顕微鏡や一般的なフォトニクス実験のサポート用として、ステージMLS203またはLPXY1をブレッドボードに取り付けるための製品を2種類ご用意しています。ライザープレートMLSA01はステージMLS203-1およびLPXY1に対応しており、これを使うとステージの高さが31.5 mm上がります。アダプタMLSA04はステージMLS203-1およびMLS203-2に対応しており、ステージ底部に取り付けます。中央開口部をブロックしてしまいますが、ステージの高さは0.7 mmしか上がらないため、高さが制限されている場合には適しています。
| Click Image for Details |  |  |  |  |  |  |  |  |  |
| Item # | CSA1000 | MLSA02 | MLSA09 | MLSA08 | MLSA03 | MLSA06 | MLSA07 | MLSA01 | MLSA04 |
| Stage Item # | MLS203-1 or LPXY1 | MLS203-1 or LPXY1 | MLS203-1 or LPXY1 | MLS203-1 or LPXY1 | MLS203-1, MLS203-2, or LPXY1 | ||||
| Microscope Brand | Thorlabs | Olympus | Nikon | Optical Breadboard, Custom Configuration | |||||
| Microscope Model | Cerna® | IX71, IX73, IX81, IX83 | IX70 | BX41, BX43, BX51, BX53, BX61 | TE2000, Eclipse Ti | 50i, 80i, 90i, Ci-L | Eclipse FN1 | N/A | |
| Microscope Type | Upright | Inverted | Inverted | Upright | Inverted | Upright | Upright | N/A | |
| 当社ではOlympus社、Nikon社、Zeiss社、Leica社の顕微鏡に対応する製品をご用意しております。お手持ちの顕微鏡が上の表に記載されていない場合、対応するブラケットの入手可能性については当社までお問い合わせください。 |

 ズーム
ズーム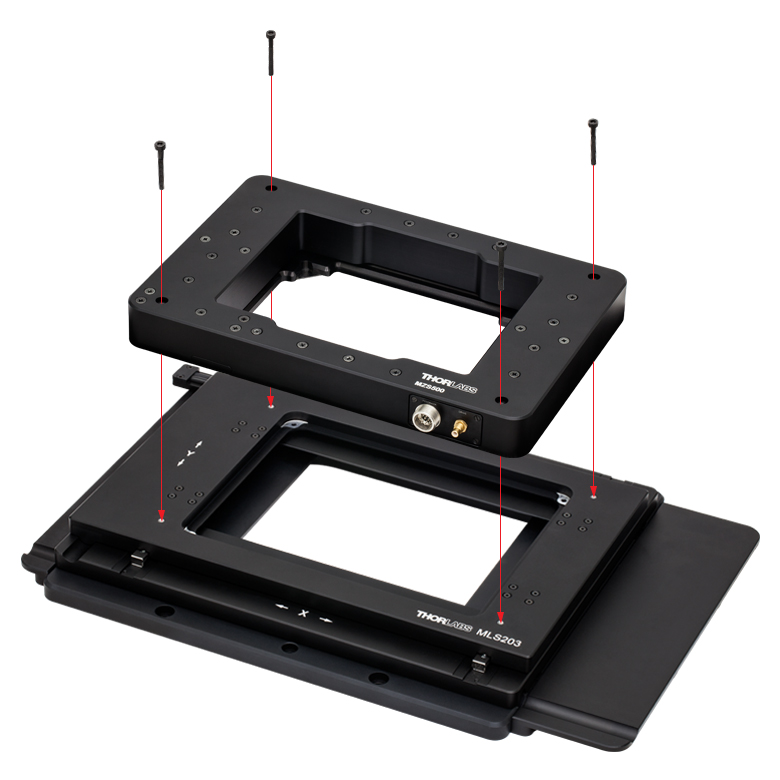

| Key Stage Specifications | |
|---|---|
| Travel Range | 500 µm |
| Resolution | 25 nm |
| Minimum Step Size | 250 nm (Typical) |
| Settling Time for 1 to 100 µm Step | 25 ms (Typical) |
- Z軸ピエゾステージならびにコントローラが付属
- Z軸ピエゾステージ:
- 電動式XYZ顕微鏡ステージシステム用Z軸ステージ
- XYステージMLS203に取り付けてご使用ください(右の写真参照)。
- 試料用プレートやジョイスティックMJC1などのアクセサリは下記にて別途ご用意しております。
- コントローラ:
- 静かな動作で、高分解能の位置制御
- 高出力:150 V、500 mA 連続駆動
- 制御用ソフトウェア一式が付属
- ソフトウェアは他のAPT™ コントローラに組込み可能(統合システム開発)
- 容量性フィードバック回路による閉ループPID位置決め
- ランプ電圧/波形発生機能
(走査用) - ユーザ制御のデジタルI/Oポート
Z軸ステージならびにコントローラのセットMZS500-Eには、Z軸ステージと閉ループのピエゾコントローラが含まれています。 ピエゾ駆動ステージの上下(Z軸)の移動量は500 µm、分解能は25 nm、そして最大許容荷重は0.25 kgです。 セットにはPC制御、Z軸位置決め、ならびにアクティブ位置フィードバックに必要な部品が全て付属します。 Z軸ピエゾステージの詳細については「仕様」タブをご参照ください。
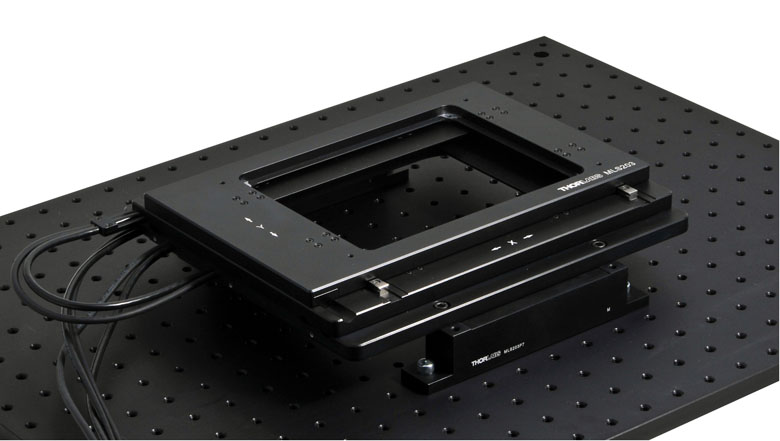
Z軸ステージをシステムに組み込むためには、まずXYステージMLS203に取り付ける必要があります(1番右の写真をご覧ください)。 この2つの製品を組み合わせることで試料全体を長距離または精密に移動することが可能になり、多様な3次元イメージングを実現します。 ステージに直接マルチウェルプレートを取り付けることもできます(右から2番の写真参照)。別売りのアクセサリについては下記をご覧ください。
ステージに付属するコントローラは、シングルチャンネルの高出力(150 V、500 mA)ベンチトップ型ピエゾコントローラで、開ループもしくは閉ループによるナノメートルレベルの位置決め制御が可能です。 柔軟なソフトウェア設定が可能なので、他社製のピエゾ素子製品の駆動にも幅広くご使用いただけます。 ご使用の際にはUSB経由でPCに接続するだけの簡単設計です。また多軸モーションコントロールの用途にご使用の場合、USBハブを経由すれば複数のユニットを1台のPCに接続が可能です。 使いやすいAPT™ソフトウェアと組み合わせれば、起動、動作開始が短時間で行えます。 さらに広範囲に対応できるActiveX®プログラミング環境を使用し、高度なモーションコントロールと シーケンスのカスタマイズが可能です。 ActiveXコントロールは、Labview、C++ならびにMatlabを含む様々なソフトウェア開発環境に組み込みが可能です。Z軸ステージコントローラの詳細については「仕様」タブをご参照ください。
ブレッドボードMZS500P4およびMZS500P5
Click to Enlarge
- MZS500P4: 15 x M6、25 mm ピッチ
- MZS500P5: 15 x 1/4"-20、1インチピッチ
マルチスライドホルダC4SH01
Click to Enlarge
- プラスチックホルダには25 mm × 75 mm、厚み1.1 ± 0.2 mmの顕微鏡スライドを取り付け可能
- 当社が販売する26 mm x 76 mmスライドには対応しません。
- 自動組織解析および組織マイクロアレイ解析用のスライドを4枚まで取り付け可能
- マルチウェルプレート(127.6 mm × 85.5 mm)と同じサイズ
スライドガラス/ペトリ皿ホルダMZS500P2
Click to Enlarge
- 幅25 mm~25.4 mmの顕微鏡スライドに対応
- 直径30 mm~60 mmのペトリ皿に対応
- 当社が販売する26 mm x 76 mmスライドには対応しません。
- ミリ規格またはインチ規格両方のアクセサリでご使用になれます。
ブランクアダプタープレートMZS500P3
Click to Enlarge
- カスタム用途に適した製品
- 穴あけ、ネジ切り加工が容易
ブレッドボードプレート使用例
Click to Enlarge
Z軸ステージMZS500-Eに取り付けられたMZS500P5
マルチスライドホルダ使用例 
Click to Enlarge
Z軸ステージMZS500-Eに取り付けられたスライドホルダトレイC4SH01
スライド/ペトリ皿使用例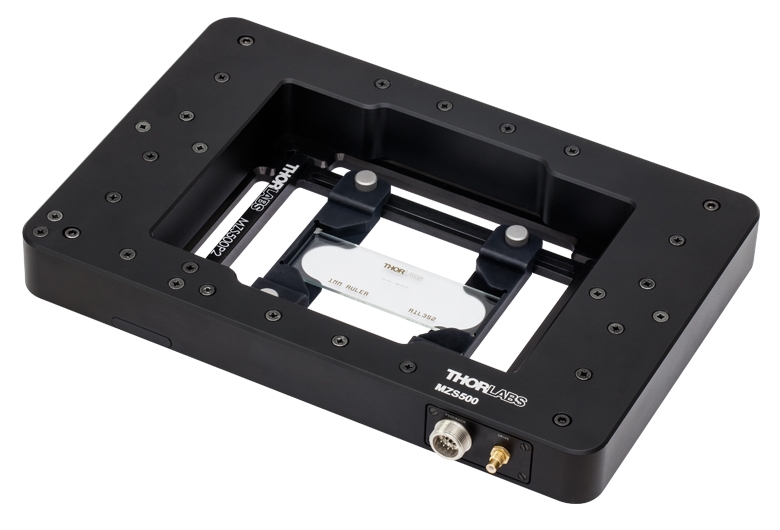
Click to Enlarge
ステージ用マイクロメータ付きZ軸ステージMZS500-Eに取り付けられたスライド/ペトリ皿ホルダMZS500P2
ブランクアダプタープレート使用例
Click to Enlarge
Z軸ステージMZS500-Eに取り付けられたMZS500P3

 ズーム
ズーム- ステージMLS203とLPXY1との使用に適しています。
- USB HIDプロトコルを使用した信頼性の高いジョイスティック
- ジョイスティックノブによる2軸制御
- 高速または高精度の動作を実現する2種類のモード
- 感度調整のための速度ダイヤル
- リモート手動操作が可能
- PCを用いて再プログラム可能
- 人間工学に基づいた設計
ジョイスティックコンソールMJC2は、顕微鏡向けに設計されており、ステージMLS203やLPXY1ほか、XY移動ステージを手動で直感的に位置決めできます。このコンソールはXY制御に便利な2軸ジョイスティックです。ほとんどの用途では、コントローラにデフォルト値として保存されたパラメータの設定が利用できるので、ユーザ自身による設定が不要です。したがってホストPCに接続する必要がない真のリモート操作が実現できます。PCを使用してパラメータを再設定したとき、それをペアリングしたコントローラにも保存できます。そのため、PCとの接続を外してもリモート操作を継続できます。
ジョイスティックMJC2は、当社のベンチトップ型ブラシレスDCモーターコントローラ、ラックマウント型ブラシレスコントローラ、ブラシレスDCモーターコントローラーモジュール、ステッピングモーター用コントローラに対応します。これらのコントローラやUSB HIDクラスを使うセットアップと組み合わせて使用できるように、ジョイスティックにはMini-DINポートとUSB Type-Cポートの両方が付いています。また、6ピンMini-DINプラグ-プラグケーブルとUSB 3.1 Type-A - Type-Cケーブルの2本のケーブルが付属します。USB HIDを使用したジョイスティックの設定やセットアップの詳細は、型番横の赤いアイコン( )をクリックしてマニュアルをご覧ください。このジョイスティックをBBD10xシリーズと使用する場合の対応ケーブルについては当社までお問い合わせください。
)をクリックしてマニュアルをご覧ください。このジョイスティックをBBD10xシリーズと使用する場合の対応ケーブルについては当社までお問い合わせください。

 ズーム
ズーム- ステージMZS500-E用に適した製品
- USB HIDプロトコルを使用した信頼性の高いジョイスティック
- エンコーダーノブを介した1軸制御
- 高速動作または高精度動作の2種類のモード
- 感度調整のための速度ダイヤル
- リモート手動操作が可能
- PCを用いて再プログラム可能
- 人間工学に基づいた設計
ジョイスティックコンソールMJC1は、顕微鏡を使用する際に、ステージMZS500を手動で直感的に位置決めできるように設計されています。この製品は上記のコントローラMZS500-Eと組み合わせて使用します。コンソールには1軸制御用のエンコーダーノブ、高速動作と高精度動作を切り替えるためのプッシュボタン、および速度制御を微調整するための速度ダイヤルが付いています。ほとんどの用途では、対応するコントローラにデフォルト値として保存されているパラメータ設定のままでご利用いただくことができ、それ以上のセットアップ作業は必要ありません。従って、ホストPCに接続する必要もなく、真のリモート操作が実現できます。さらに、PCを使用してパラメータを再設定したときも、その設定値はコントローラに保存されるため、PCとの接続を外してもジョイスティックによるリモート操作を継続できます。
ジョイスティックMJC1は、コントローラMZS500-Eのような当社のBPC30xシリーズベンチトップ型ピエゾコントローラに対応します。これらのコントローラやUSB HIDクラスを使うセットアップと組み合わせて使用できるように、ジョイスティックにはMini-DINポートとUSB Type-Cポートの両方が付いています。また、6ピンMini-DINプラグ-プラグケーブルとUSB 3.1 Type-A - Type-Cケーブルの2本のケーブルが付属します。USB HIDを使用したジョイスティックの設定やセットアップの詳細は、型番横の赤いアイコン()をクリックしてマニュアルをご覧ください。