 Products Home
Products Home19インチラックマウント型ブラシレスDCコントローラー

- 19", 1U Rack-Mounted Enclosure
- Supports 3-Phase, Brushless DC Servo Motors
with up to 2.5 A Peak Coil Current - Accepts Optical Encoder Feedback
- APT™ Control Software Suite
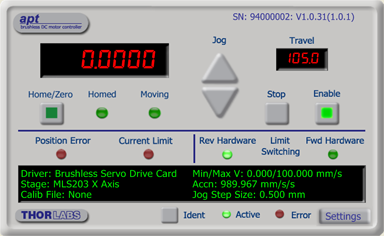
GUI Panel
RBD201
1-Channel Controller







Please Wait
| Other Brushless DC Servo Controllers |
|---|
| K-Cube™ Single-Channel Controller |
| Benchtop Controllers (1-, 2- and 3-Channel) |

Click to Enlarge
RBD201の前面パネルと背面パネル

Click to Enlarge
汎用の19インチラックシステムに取り付けられたコントローラRBD201
特長
- 当社の3相ブラシレスDCサーボモータ製品をサポート
- エンコーダによる速度と位置の閉ループ制御
- ユーザI/Oポートにモニタ用エンコーダ信号を入出力
- AUX I/Oポートにデジタル信号を入出力
- APT™ ソフトウェア制御による完全サポート
- すべてのAPT™コントローラ製品とシームレスな統合が可能
- ActiveX®ソフトウェアグラフィカルパネル
ブラシレスDCモーターコントローラRBD201は、高速(数百 mm/s程度)および高いエンコーダ分解能(100 nm未満)での操作が必要なモーションコントロール用途に適しています。 このシングルチャンネルコントローラは、標準的な19インチラック(1U高さ)に収まるよう設計されています。 この製品は様々な用途において高精度なモーションコントロールに寄与しますが、特にリニアモーターステージDDS220/M やDDS600/Mと組み合わせて使用すると、最高400 mm/sの速度を実現することが可能です。最新のデジタルおよびアナログ電子回路技術と高帯域幅、高出力のサーボ制御回路により、ピークコイル電流2.5 Aまでの当社製3相ブラシレスDCサーボモータ製品を駆動する設計となっています。
コントローラRBD201は、付属の統合APT™ソフト ウェアにより、標準的な制御およびプログラミングインターフェイスが備わっているので、自動モーションコントロールの用途に簡単に組みこむことができます。 使用中でもプログラムの書き換えが可能なため、新しいプログラミングインターフェイス(顕微鏡標準コマンドセットなど)が追加された場合でも、すぐに最新のファームウェアにアップグレードすることが可能です。
USB接続によってPCによる操作が簡単に行えます。 多軸モーションコントロール用途(2軸ステージMLS203シリーズ等) にご使用の場合、標準的なUSBハブを介して複数のユニットを1 台のパソコンに接続できます。 当社のAPT™ ソフトウェアを利用することにより、複雑な動作シーケンスを短時間で稼動させることができます。 このソフトウェアには、当社のステージおよびアクチュエータ製品用に、すべての関連動作パラメータが自動設定されています。ActiveX®プログラミング環境を使うと、高度なカスタム制御やシーケンス設定が可能になります。拡張型ActiveX® プログラミング環境を使用すれば、より高度なカスタム動作制御やシーケンスも可能となります。詳細は、「モーションコントロールソフトウェア」のタブをご参照ください。
コントローラRBD201のソフトウェアインターフェイスは、他の APT™ シリーズコントローラと共通要素が多いため、システムに簡単に組み込むことができ、また短期間で習得することが可能です。 このユニットは APT™シリーズの最新コントローラの1つなので、様々な機能を有する APT™ シリーズ PCソフトウェアツールに含まれており、製品を入手後すぐにお使いいただけます。
注:コントローラRBD201は、19インチラック用の設計となっております。 ベンチトップ型コントローラについては、こちらをご覧ください。
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに付属しており、コントローラには付属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。
ブラシ付きDCモータまたは直線型ステージDDS050/MおよびDDS100/Mにはご使用になれません。
このコントローラは、大きな電力を必要とするブラシレスDCサーボモータ用の設計となっております。当社のブラシ付きDCサーボモーターデバイスの制御については、K-Cube™ブラシ付きDCサーボモーターコントローラKDC101のページをご覧ください。直線移動ステージDDS050/MおよびDDS100/Mの制御には、K-CubeブラシレスDCサーボーモーターコントローラKBD101をご覧ください。
ジョイスティック
ジョイスティックMJC2およびMJC3は、ステージの位置決めを直観的かつ触覚的に手動で制御できるよう設計されています。MJC2にはXY制御用の2軸ジョイスティックノブ、MJC3にはXYZ制御用の3軸ジョイスティックノブが付いています。コントローラにはデフォルトでパラメータの設定が保存されており、それらはほとんどの用途で適用できます。新たな設定が不要なため、ホストPCに接続する必要のない真のリモート操作が実現します。
その他のコントローラ
当社ではDCサーボモータ、ステッピングモータ、ピエゾアクチュエータ用のモーションコントローラを各種取り揃えております。 詳しくは、下の「Additional DCサーボコントローラ」の各リンクからご覧いただけます。
| Specifications | |||
|---|---|---|---|
| Number of Channels | 1 | ||
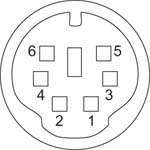
| Motor Drive Connector | 8 Pin DIN, Round, Female | ||
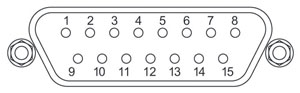
| Feedback Connector | 15-Pin D-Type | ||
| Brushless Continuous Current Output | 2.5 A | ||
| PWM Frequency | 40 kHz | ||
| Operating Modes | Position and Velocity | ||
| Control Algorithm | 16-Bit Digital PID Servo Loop with Velocity and Acceleration Feedforward | ||
| Velocity Profile | Trapezoidal/S-Curve | ||
| Position Count | 32 Bit | ||
| Position Feedback | Incremental Encoder | ||
| Encoder Bandwidth | 2.5 MHz (10 M Counts/sec) | ||
| Encoder Supply | 5 V | ||
| AUX Control Connector | 15-Pin D-Type | ||
| Input Power Requirements (Region-Specific Power Cord Included) | 150 VA Voltage: 100 to 240 VAC Frequency: 50 to 60 Hz Fuse: 2.0 A | ||
| Dimensions | 482.6 x 264.8 x 43.7 mm (19" x 10.43" x 1.72") | ||
| Weight | 3.4 kg (7.5 lbs) | ||
モーターアクチュエータ
メス
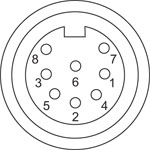
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase V | 5 | Stage ID |
| 2 | GND | 6 | GND |
| 3 | Temp Sensor (Not Used) | 7 | Motor Phase W |
| 4 | Motor Phase U | 8 | Enable |
フィードバック
D型 メス
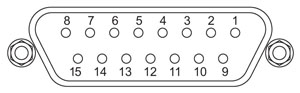
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Not Connected | 11 | Limit Switch - |
| 4 | Index - | 12 | Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7a | 5 V | 15 | Not Connected |
| 8a | 5 V |
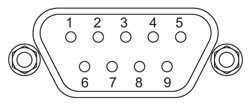
USER I/O
D型 オス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | 5 V | 9 | QA + |
| 2 | Trigger IN | 10 | QA - |
| 3 | Trigger OUT | 11 | QB+ |
| 4 | Ground | 12 | QB - |
| 5 | Ground | 13 | Index/Ref + |
| 6 | For Future Use | 14 | Index/Ref - |
| 7 | For Future Use | 15 | Ground |
| 8 | For Future Use |
AUX I/O
D型 メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Digital O/P 1 | 9 | Digital Ground |
| 2 | Digital O/P 2 | 10 | Digital Ground |
| 3 | Digital O/P 3 | 11 | For Future Use |
| 4 | Digital O/P 4 | 12 | For Future Use |
| 5 | Digital Ground | 13 | Digital I/P 4 |
| 6 | Digital I/P 1 | 14 | 5 V Supply O/P |
| 7 | Digital I/P 2 | 15 | 5 V Supply O/P |
| 8 | Digital I/P 3 |
ハンドセット
Mini DIN メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input)/RS232 | 4 | Supply Voltage for Handset 5V |
| 2 | Ground | 5 | TX (Controller Output)/RS232 |
| 3 | Ground | 6 | Ground |
インターコネクト
D型 オス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 6 | Not Connected |
| 2 | RX (Controller Input) | 7 | Not Connected |
| 3 | TX (Controller Output) | 8 | Not Connected |
| 4 | Not Connected | 9 | Not Connected |
| 5 | Ground |
ドライバの適応性
当社は、様々な動作仕様を備えたブラシレスDCサーボモータとアクチュエータをご用意しております。 そのため、apt™DCサーボコントローラは、あらゆるモータとアクチュエータの組合せを完全にサポートできるような設定が可能となっております。 PID制御ループ値、最小・最大ステージ位置、送りネジピッチ、リミットスイッチの設定などの主要な設定は、付属のapt™ソフトウェアで表示されます。 また、相対動作および絶対動作は、速度プロファイルパラメータを用いた動作プロファイルに沿って起動できます。 特定のステージやアクチュエータに対しては、ゼロ値を確立するためのホーミング系列も完全対応します。 apt™ソフトウェアにはMLS203ステージを含む当社の各ステージならびにアクチュエータの操作を簡単にするために予め組み込まれた設定も入っています。
主要なパラメータは全て付属のグラフィカルソフトウェアパネルから直接調整可能です。 カスタム仕様のモーションコントロールを設定する場合、すべてのコントローラの設定ならびにコマンドはActiveX®プログラミングライブラリからのア クセスも可能です。 プログラミングライブラリは包括的で、ユーザ定義プログラムからアクセスできる関数やパラメータは数百にものぼります。
また、プログラミングライブラリは本来、言語独立型なのでActiveX ®に準拠した様々なプログラミング環境によってサポートされています。 この中にはLabVIEW、Visual Basic、C++、Matlab、HPVEEなどがあります。
注: 自動アライメントシーケンス用に、これらの設定やパラメータはプログラム可能な ActiveX®インターフェイスからのアクセスも可能です。 RBD201用apt™ソフトウェアのサポートについては「ソフトウェア」タブもご覧ください。
GUIコントロール& ActiveX®コントロールソフトウェア一式


BBD コントローラには最先端のソフトウェアサポート一式が完備されています。 このセットには、複雑な設定が不要で、コントローラを入手後すぐに使用開始を可能とするユティリティが多数含まれています。 全ての動作モードは手動アクセスが可能です。パラメータを変更し、また次回まで保存しておくこともできます。 より高度なカスタム仕様のモーションコントロール用途にご使用の場合、様々なプログラミング環境におけるカスタム仕様の開発がサポートする ActiveX®プログラミング環境も付属しています。 注: これらの設定やパラメータはプログラム可能な ActiveX®インターフェイスからのアクセスも可能です。 .RBD201用apt™ソフトウェアのサポートについては「モーションコントロールソフトウェア」タブもご覧ください。 apt™ソフトウェアのプログラミング方法は、「APTチュートリアル」タブ内のビデオでご紹介しています。
付属のActiveX® apt™システムソフトウェアは、当社のマルチチャンネルのラックベースシステムや小型光学テーブルに取付け可能な T-Cubeコントローラをはじめとする apt™コントローラ製品にも互換性があります。 1つに統合されたソフトウェアによって、単体位置決めの用途で使用するapt™ベンチトップ、テーブルトップならびにラックベースのあらゆるユニットを シームレスに組み合わせることが可能です。
apt™シリーズのコントローラならびに関連する可動製品の特徴は、主にハードウェアならびにソ フトウェア両方のレベルにおいて完全自動のアライメント・位置決めシステムが設計できることです。 apt™シリーズのコントローラには全てUSB接続部が付いております。 マルチドロップバスにより、複数のapt™ユニットを市販のUSBハブやケーブルを使用して1台のPCにつなぎ、制御することを可能になります。 マルチチャンネルの用途をお考えの場合、単純に必要なドライバの数と種類を足して、その数のapt™コントローラにつなげるだけとなります。
ソフトウェア開発者向けサポート用 CD
apt™ シリーズのコントローラには、開発者向けのキットが含まれています。 このサポートソフトウェアは、apt™ 製品を組み込んだ大型システムのソフトウェア開発向けです。 キットには便利なコードサンプルやビデオチュートリアル情報が豊富に含まれています。
当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.47
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
| Posted Comments: | |
| No Comments Posted |