 Products Home
Products Home高速電動XY走査ステージ
- Ultra Fast XY Scanning Up to 250 mm/s
- Low-Profile, Compact Footprint
- Compatible with Thorlabs' Cerna®, Nikon,
Olympus, and Zeiss Microscopes
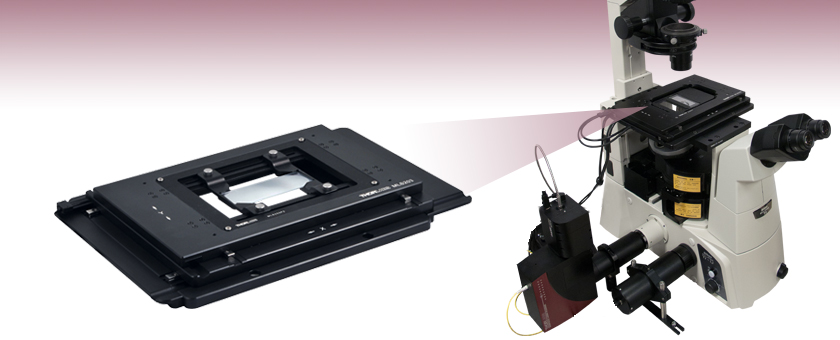
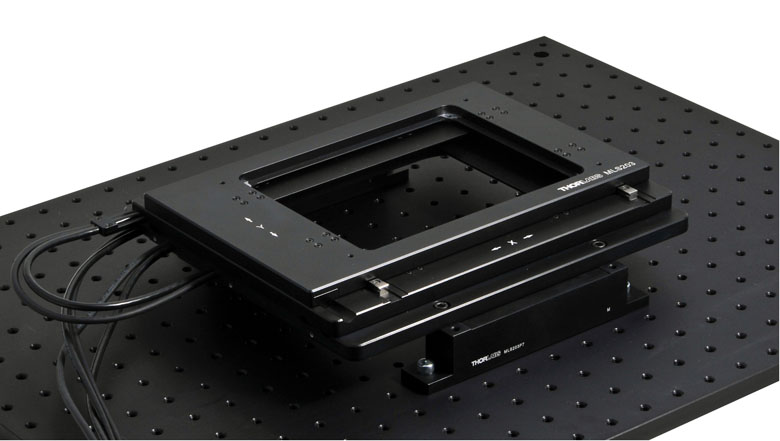
MLS203-1 Stage Shown Mounted to a Nikon
Eclipse Ti-U Microscope Equipped
with Thorlabs' Confocal Imaging System
MLS203-1
Shown with MLS203P2 Slide Holder.
Stage Dimensions: 260 mm x 230 mm x 31 mm


















Please Wait
特長
- Nikon製、Olympus製、Zeiss製ならびに当社のCerna®の正立および倒立顕微鏡と統合
- 試料へのアクセスが容易な小型設計
- 様々なサンプルホルダをご用意
- ブラシレスDCリニアサーボモーターアクチュエータ内蔵
- 光学式リニアエンコーダ
- 高品質、高精密な工業用リニアベアリング
- 高い繰り返し精度(0.25 µm)と位置確度(<3.0 µm)
- ソフトウェア: Kinesis®およびAPT™に対応
当社のMLS203シリーズのステージは、Nikon製、Olympus製、Zeiss製、当社の Cerna®顕微鏡の手動ステージを簡単に置き換えられるように設計されており、電動で試料のXY位置決めができます。ステージのアセンブリは、ステージ、コントローラ、取付けブラケット、その他のアクセサリで構成されますが、それぞれ個別にご購入いただく必要があります。下表は、顕微鏡によってご購入いただく必要のある製品のリストです。また、別売りの取付け用アダプタはステージを光学テーブルやブレッドボード上にボルト締めして独自の顕微鏡セットアップの一部として、もしくは一般的なフォトニクスの用途に使用することも可能です。
高速走査機能と高い位置確度が特長の本ステージは、様々な種類の顕微鏡やイメージングのアプリケーションにおける標本や試料を手動、もしくは自動で位置決めするのに、非常に適しています。細胞レベルでの非常に精密な手動位置決めや制御は安定な閉ループ制御システムとジョイスティックにより、簡単に行えます。また、このステージは当社のZ軸ピエゾステージと組み合わせて、レーザ走査型顕微鏡にご使用いただけるXYZステージを構成することもできます。高速性を必要としない用途向けには、Nikon、Olympus、および当社のCerna顕微鏡に取付け可能な薄型の電動XY走査ステージ(下表参照)をご用意しております。
こちらの電動ステージの技術はUS特許8,575,792により保護されています。
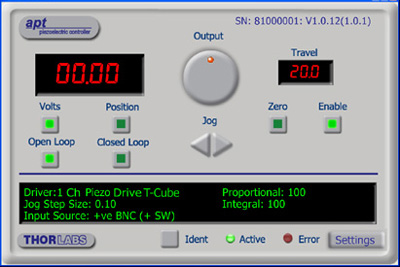
コントローラ
ステージMLS203には、当社のKinesisおよびAPTソフトウェアに対応する 2チャンネルブラシレスDCサーボコントローラBBD302を推奨します。コントローラの概要については下記の製品紹介をご覧ください。詳細についてはこちらのページ をご覧ください。当社では 19インチラック型モーションコントロール用シャーシMMR60x用に設計されたコントローラーモジュールMBD602もご用意しております。
試料ホルダとアクセサリの取付け
様々なアクセサリのアダプタによって、一般的なスライドガラス、マルチウェルプレート、ペトリ皿や金属試料の位置決めが可能です。詳細については、下記をご覧ください。
顕微鏡用ステージアセンブリ
| Microscopea | XY Scanning Stage / Controller | Mounting Bracket | Optional Specimen Holders and Accessories |
|---|---|---|---|
| Thorlabs Cerna | MLS203-1 Stageb / BBD302 Controller | CSA1000 | MLS203P1: Multiwell Plate Adapter MLS203P2: Petri Dish / Slide Holder for Inverted Microscopes C4SH01: Multi Slide Holder for Inverted Microscopes MLS203P3: Blank Adapter Plate MLS203P5: 1/4"-20 Tapped Breadboard Plate MLS203P4: M6-Tapped Breadboard Plate MLS203P10 & MLS203P13: Multiple Slide Holders for Upright and Inverted Microscopes MJC2: 2-Axis Microscopy Joystick |
| Nikon 50i, 80i, 90i, and Ci-L | MLSA06 | ||
| Nikon TE2000 and Eclipse Ti | MLSA03 | ||
| Nikon Eclipse FN1 | MLSA07 | ||
| Olympus BX41, BX43, BX51, BX53, and BX61 | MLSA08 | ||
| Olympus IX51, IX71, IX73, IX81, and IX83 | MLSA02 | ||
| Olympus IX70 | MLSA09 | ||
| Zeiss Axio Observer and Axiovert 40 | MLS203-2 / BBD302 Controller | None Needed | |
| Optical Breadboard / Custom Configuration | MLS203-1 Stageb / BBD302 Controller | MLSA01 or MLSA04 | |
| MLS203-2 / BBD302 Controller | MLSA04 |
| MLS203 Stage | |
|---|---|
| Travel Range | 110 mm x 75 mm (4.3" x 2.95") |
| Speed (Max) | 250 mm/s |
| Acceleration (Max) | 2000 mm/s2 |
| Bidirectional Repeatability | 0.25 µm |
| Unidirectional Repeatability | 0.25 µm |
| Backlasha | N/A |
| Load Capacity (Max)b | 1 kg (2.2 lb) |
| Incremental Movement (Min) | 0.1 µm |
| Absolute On-Axis Accuracy | < 3 µm |
| Percentage Accuracy (Max) | X-Axis: 0.0027% Y-Axis: 0.004% |
| Flatness in X Axis | ±3 µm Over Full Travel , ±1 µm Over 10 mm |
| Flatness in Y Axis | ±2 µm Over Full Travel , ±1 µm Over 10 mm |
| Home Location Accuracy | 0.25 µm |
| Settling Time within 1 µm (600 g Load) | 0.1 s |
| Settling Time within 0.1 µm (600 g Load) | 0.6 s |
| Weight (Including Cables) | 3.2 kg (7.0 lbs) |
| Limit Switches | X and Y as Standard |
| Bearing Type | Precision Linear Bearing |
| Motor Type | Brushless DC Linear Motor |
| Dimensions (Mid Travel, Excluding Guards) | 260.0 mm x 230.0 mm x 31.3 mm (10.24" x 9.06" x 1.23") |
| Recommended Controller | BBD302 |
| BBD302 Controller | |
|---|---|
| Number of Channels | 2 |
| Drive Connector | 8 Pin DIN, Round, Female |
| Feedback Connector | 15-Pin D-Type, Female |
| Brushless Continuous Output | 2.5 A per Channel, 5 A Max All-Channel Total Output |
| Brushless Peak Output | 4.0 A per Channel, 5 A Max All-Channel Total Output |
| PWM Frequency | 40 kHz |
| Operating Modes | Position and Velocity |
| Control Algorithm | 16-Bit Digital PID Servo Loop with Velocity and Acceleration Feedforward |
| Velocity Profile | Trapezoidal/S-Curve |
| Position Count | 32 Bit |
| Position Feedback | Incremental Encoder |
| Encoder Bandwidth | 2.5 MHz (10 M Counts/sec) |
| Encoder Supply | 5 V |
| AUX Control Connector | 37-Pin D-Type Female (User Digital IO, 5 V O/P) |
| Front Panel Display | 4.3" Full-Color LCD, 480 x 272 Pixels |
| Input Power Requirements | 250 VA Voltage: 100 to 240 VAC Frequency: 47 to 63 Hz Fuse: 3.15 A |
| Dimensions (W x D x H) | 250.0 mm x 279.1 mm x 108.8 mm (9.84" x 10.99" x 4.28") |
| Mass (Weight) | 1.70 kg (3.75 lbs) |
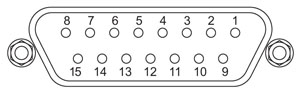
MLS203シリーズ XY走査ステージのピン配列
Motor Drive
オス
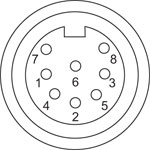
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase V | 5 | Stage ID |
| 2 | GND | 6 | GND |
| 3 | Thermistor (Not Used) | 7 | Motor Phase W |
| 4 | Motor Phase U | 8 | Enable |
Encoder Feedback
D型 オス
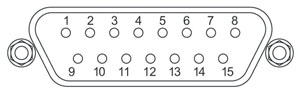
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Not Connected | 11 | Limit Switch - |
| 4 | Enc Index - | 12 | Enc Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7 | 5 V | 15 | Not Connected |
| 8 | 5 V |
MLS203シリーズ用コントローラ(BBD302)のピン配列
モータードライバ
DINコネクタ、メス
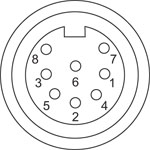
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase V | 5 | Stage ID |
| 2 | GND | 6 | GND |
| 3 | Temp. Sensor (Not Used) | 7 | Motor Phase W |
| 4 | Motor Phase U | 8 | Enable |
フィードバック
D型コネクタ、メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Not Connected | 11 | Limit Switch - |
| 4 | Index - | 12 | Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7a | 5 V | 15 | Not Connected |
| 8a | 5 V |
ハンドセット
Mini DINコネクタ、メス
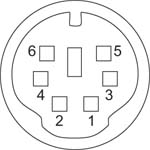
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input) | 4 | Supply Voltage for Handset 5 V |
| 2 | Ground | 5 | TX (Controller Output) |
| 3 | Ground | 6 | Ground |
補助I/O
D型コネクタ、メス

| Pin | Description | Pin | Description | Pin | Description | Pin | Description |
|---|---|---|---|---|---|---|---|
| 1 | RS232 TX | 11 | User Digital O/P 11+ | 21 | +5 V | 31 | User Digital O/P 4+ |
| 2 | RS232 RX | 12 | User Digital O/P 10- | 22 | User Digital I/P 3 | 32 | User Digital O/P 4- |
| 3 | Ground | 13 | User Digital O/P 10+ | 23 | User Digital I/P 2 | 33 | User Digital O/P 5+ |
| 4 | Differential I/P 2+ | 14 | User Digital O/P 9- | 24 | User Digital I/P 1 | 34 | User Digital O/P 5- |
| 5 | Differential I/P 2- | 15 | User Digital O/P 9+ | 25 | User Digital I/P 0 | 35 | User Digital O/P 6+ |
| 6 | Differential I/P 1- | 16 | User Digital O/P 8- | 26 | User Digital O/P 0 | 36 | User Digital O/P 6- |
| 7 | Differential I/P 1+ | 17 | User Digital O/P 8+ | 27 | User Digital O/P 1 | 37 | Ground |
| 8 | User Digital O/P 12- | 18 | User Digital O/P 7- | 28 | User Digital O/P 2 | - | - |
| 9 | User Digital O/P 12+ | 19 | User Digital O/P 7+ | 29 | User Digital O/P 3 | ||
| 10 | User Digital O/P 11- | 20 | +5 V | 30 | Ground |
USB
USB Type B、メス
I/O
BNCコネクタ、メス
5 V TTL
当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.49
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisまたはAPTベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内KinesisまたはAPT駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
| Posted Comments: | |
user
(posted 2023-09-11 15:07:02.263) Hi, could you update the STEP file for MLS203-1? The current file is missing some of the mounting holes. Thanks! do'neill
(posted 2023-09-12 04:54:19.0) Daniel O Neill: Response from Daniel at Thorlabs. I have let our web team know about this and they are looking into this and this should be sorted shortly. Huiwang Ai
(posted 2023-07-14 23:33:07.88) Can this stage be made compatible with the Leica DMI4000B microscope? fguzman
(posted 2023-07-19 09:21:43.0) Thank you for enquiry and interest in our microscope stages.
There are no adapters specifically made for Leica, but it is likely that one of the existing ones could fit. The problem for us, when it comes to external microscopes, is that we have very small possibilities to know if they will fit. We provide drawings and solid-works models for all our adapters; they are available on the webpage. If you have any more questions please contact techsupport@thorlabs.com Oscar Gomez Calderon
(posted 2023-01-12 10:35:18.85) We would like to ask you a question about the multiwell plate adapter MLS203P1. We are using our 96-well plates (e.g. from biomat or Nunc TM) but we are not able to properly fit them. They can still be moved. Could you please help us?
Sincerely yours
Oscar JReeder
(posted 2023-01-20 06:32:49.0) Thank you for your enquiry. The MLS203P1 should be compatible with standard size well plates. I have reached out to you to assist with this. Oscar Gómez Calderón
(posted 2022-09-29 22:15:59.333) We have just acquired the high-speed motorized XY Scanning Stage MLS203-1 with the controller BBD302. We are planning to use it with Labview (LabView 2011 32 bit). We have instaled the Kinesis software (32 bit) and followed the Kinesis LabView Guide. When we tried to insert the Kinesis .NET control assembly we got the following error: System.BadImageFormatException: cannot load file or assembly "..... Thorlabs.MotionControl.Benchtop.BruslessMotor.dll" the assembly is expected to have an assembly manifest.
Could you please help us?
Best regards
Oscar cwright
(posted 2022-10-03 09:59:34.0) Response from Charles at Thorlabs: thank you for your query. This is often seen when using 32 bit LabVIEW on 64 bit Windows and trying to use the 32 bit Kinesis dlls instead of the 32 for 64 bit dlls. Tigrane Cantat-Moltrecht
(posted 2022-03-03 15:19:39.8) Hello,
upon powering up the BBD203 controller, at the initialization of the X and Y channels, each channel seems to suffer a sudden "jolt", like a violent but very short movement. I witness this at every turning on on two different stage+controller pair. Is this behaviour normal/to be expected ?
Also on a few occasions, at this stage the controller seemed to be forcing the channels with series of these "jolts" and was unable to complete initialization. Could you help with this ?
Thanks,
Tigrane CM cwright
(posted 2022-03-04 06:37:54.0) Response from Charles at Thorlabs: Thank you for contacting us. The stage must go through a startup process called phase initialisation. The controller is energising the coils and measuring the resulting movement. This means that on power up, the stage may make a slight buzzing noise and move about randomly for a few seconds. This is likely what you are experiencing. Phase initialisation cannot coomplete if there is an obstruction to this movement or there is dust on an encoder. A member of technical support will contact you. You local technical support can also be contacted directly using the contact details here: https://www.thorlabs.de/locations.cfm Jie Chen
(posted 2021-02-24 14:47:05.423) I want to write some codes to control the BBD203 controller. Is there any example code to give me an assistance? Thank you! DJayasuriya
(posted 2021-02-25 10:06:15.0) Thank you for your inquiry. I Will get in touch with you directly to assist you. DJayasuriya
(posted 2021-02-25 10:06:15.0) Thank you for your inquiry. I Will get in touch with you directly to assist you. Dohyun Kim
(posted 2021-02-22 16:09:02.06) Dear Thorlab
I am an associate professor in the Department of Mechanical Engineering, Myongji University, South Korea.
I am highly interested in your high-speed XY stage. I would like to use this stage on my IX-70 microscope for fluorescence imaing. My question is:
Can this stage move 0.5 mm distance +X and -X directions 5 times per second with this stage?
In theory, it seems possible considering it would only take 0.5mm/(250 mm/s)= 2 ms but i guess one has to consider acceleration and deceleration.
Regards, YLohia
(posted 2021-02-22 11:41:04.0) Thank you for contacting Thorlabs. Yes, this is possible. Please see the acceleration (and deceleration) times as a function of load (> 500 mm/s²) listed on page 11 of the manual: https://www.thorlabs.com/_sd.cfm?fileName=20967-D02.pdf&partNumber=MLS203-1 Christian Maibohm
(posted 2020-08-04 05:49:07.99) Dear Thorlabs,
Is it possible to run the MLS203-1 stage with micro-manger?
I can see in a question below that this stage is not recommended to operate in an incubator environment. Does this also apply to a stage-top incubator system such as the OKO-lab uno or similar systems?
Thank you in advance, Christian Maibohm DJayasuriya
(posted 2020-08-07 06:41:42.0) Thank you for your inquiry. Yes it is possible to use mirco-manager with the MLS stage. I will get in touch with you to send a general comments guide. We have worked with Tokai-Hit for stage-top incubators and they proved successful. tobias.meyer
(posted 2018-01-08 10:37:18.78) Hi, I have purchased the stage in order to use it with a thorlabs resonant LSM (which is not sold any more, the res. LSM with 4 channels detection). How do I integrate the stage with ThorimageLS? It does not automatically detect the stage. I have installed it and it runs, but I would prefer to move it through Thorimage. Can you help me with that?
Thank you very much,
Tobias bwood
(posted 2018-02-05 04:12:17.0) Response from Ben at Thorlabs: Thank you for your question. I will be in contact with you directly to discuss using the MLS203-1 with ThorimageLS. patrick.lu
(posted 2015-02-27 15:59:48.293) Sorry to clutter the thread, but we would also like the documentation for the low level serial communication. While we expect to use the ActiveX approach, I would like to explore both options. msoulby
(posted 2015-03-02 04:00:35.0) Response from Mike at Thorlabs: The low level communications protocols can be freely downloaded from the following link http://www.thorlabs.de/software/apt/APT_Communications_Protocol_Rev_14.pdf however we will also send this document to you directly. patrick.lu
(posted 2014-12-12 20:15:43.15) Is it possible to add a hardware limit switch to the stage? For instance, in our space-constrained setup, we will have collisions if the stage is allowed to move through its full 110mm range along the x-axis. We would rather limit it to 75mm of travel. Since we are planning to control the stage using LabVIEW, this will be possible in software, but I think for peace of mind it would be nice to constrain it through hardware as well. msoulby
(posted 2014-12-15 06:55:10.0) Response from Mike at Thorlabs: The stage does have hardware limit switches at the extremes of travel to prevent the stage from driving into the edge as you would expect, however it is not possible to add a hardware limit switch in the middle of the travel. Therefore using a software platform such as Labview to implement a travel restriction is currently the only option that is currently feasible with the MLS203-1 rauer
(posted 2014-09-19 15:39:13.903) Is there a different way to programmtically (in C#) control this stage than using an activex control? msoulby
(posted 2014-09-22 03:26:21.0) Reponses from Mike at Thorlabs: If you do not wish to use ActiveX one other option would be to make use of direct serial communication through a virtual COM port on the USB. We have documented all of the low level communications protocols that can be used with our controllers and have emailed you directly with this document and some brief instructions on using the protocols. jaz22
(posted 2014-07-25 15:17:16.22) Can this stage also be mounted vertically if I would like to use it for an application other than microscopy? msoulby
(posted 2014-07-29 04:46:23.0) Response from Mike at Thorlabs: The brushless DC motors in the MLS203 cannot be used in a vertical configuration. The stage would be able to operate vertically however as soon as the power is removed there is no braking on the moving world. The stage will fall rapidly to the bottom. This shock of the moving world and load hitting the end of the stage can potentially cause damage to the stage. You would need to use a lead screw driven stage for vertical configurations, for example the MTS50 or LNR50S. yatang32
(posted 2014-06-23 14:24:33.647) If I want to use Labview to program MLS203-1, can I do it with
the controller? bhallewell
(posted 2014-06-23 06:14:39.0) Response from Ben at Thorlabs: Yes, you can! Our recommended BBD202 series controller can be controlled through LabVIEW. By installing our readily available APT Motion Control Software from the following link you can connect with ActiveX controls through LabVIEW to control the MLS203 stage. Please find support documentation available here also for guidance.
http://www.thorlabs.de/software_pages/ViewSoftwarePage.cfm?Code=APT
We have recently updated our software to be comptaible with both 64-bit & 32-bit versions of LabVIEW. user
(posted 2013-10-24 03:34:27.663) Dear Mr/Ms
I'm Jaeduck Jang from Korea.
According to the specs of MLS203-1, it can be adopted to IX71,81 Olympus Microscopes. As I know recent Olympus inverted microscopes are IX73 and 83. Should I use MSL203-1 with MLSA02 on IX83 platform? msoulby
(posted 2013-11-21 11:31:33.0) Response from Mike at Thorlabs: Yes, the MLSA02 and MLS201-1 can be used with the Olympus IX83 cj
(posted 2013-02-13 12:47:11.367) Can I mount a heating insert onto this device? The link below is the insert I plan on using. http://www.pecon.biz/?page_id=765
Also is this device capable of with standing the hot/humid environment in an incubation chamber? jlow
(posted 2013-02-18 11:56:00.0) Response from Jeremy at Thorlabs: We do not have specific operating temperature specs for this but the recommended temperature is <40°C. This device is not meant to be operated in a high humidity environment so I would NOT recommend using this in an incubation chamber. user
(posted 2013-02-13 20:40:54.45) Is MLS203-1 High speed motorized scanning stage controllable with Cellsens software from Olympus? jlow
(posted 2013-02-18 11:53:00.0) Response from Jeremy at Thorlabs: Unfortunately the MLS203-1 is not compatible with Cellsens software from Olympus. It can be used in micromanager which is another popular microscopy suite. If you are interested in this, please let us know and we can send you details on the setup procedure. bdada
(posted 2012-04-23 17:47:00.0) Response from Buki at Thorlabs to david:
Thank you for your feedback. We only recommend that the MLS and other brushless stages are used with Thorlabs controllers because we cannot guarantee safe use with 3rd party controllers. Please consider using our BBD102 controller shown in the page linked below:
http://www.thorlabs.de/newgrouppage9.cfm?objectgroup_id=5360
We have contacted you to discuss this further. david.naylor
(posted 2012-04-19 06:20:42.0) Hi,
I would like to use existing aerotech soloist controllers that we have http://www.aerotech.com/product-catalog/drives-and-drive-racks/soloist-mp.aspx
to drive each axis of the MLS203-1.
Could you tell me if you foresee any problems with this configuration.
Thanks
David tcohen
(posted 2012-03-08 12:30:00.0) Response from Tim at Thorlabs: Thank you for your feedback. Yes, the stage can be used in µManager. You should be able to select the stage from the list of available devices in µManager when setting up the hardware configuration. user
(posted 2012-03-08 08:06:39.0) Compatible with µManager ? |

 ズーム
ズーム| Key Specificationsa | |
|---|---|
| Travel Range | 110 mm x 75 mm (4.3" x 2.95") |
| Velocity (Max) | 250 mm/s |
| Acceleration (Max) | 2000 mm/s2 |
| Bidirectional Repeatability | 0.25 µm |
| Unidirectional Repeatability | 0.25 µm |
| Horizontal Load Capacity (Max)b | 1.0 kg (2.2 lb) |
| Min. Achievable Incremental Movement | 0.1 µm |
| Home Location Accuracy | 0.25 µm |
| Absolute On-Axis Accuracy | < 3 µm |
この小型XY走査ステージは、いくつかの顕微鏡の手動ステージと容易に置換することができ、電動で顕微鏡試料のXY位置決めが可能になります。 MLS203-1は、Nikon製およびOlympus製の倒立顕微鏡や正立顕微鏡のほか当社のCerna®顕微鏡に取り付ける事ができます(「概要」タブ参照)。アダプターブラケットは別売りで、特定の顕微鏡にステージを取り付けることができます。テーブルトップの取付け用アダプタは、ステージを光学テーブルやブレッドボード上にボルト締めして独自の顕微鏡セットアップの一部として、もしくは一般的なフォトニクスの用途に使用できます。詳細は以下をご覧ください。
MLS203-2はZeiss社製の顕微鏡Axio Observer およびAxiovert 40に直接取り付けることができるので、ブラケットは必要ありません。

 ズーム
ズーム2チャンネルコントローラBBD302には当社の標準Kinesis®ソフトウェアとプログラミングインターフェイスが含まれており、自動顕微鏡用途に簡単に導入できます。高速動作(数百mm/s)と高いエンコーダ分解能(<100 nm)が求められる用途に適しています。柔軟性をより高くするため、PCとの通信にはUSBまたはRS232シリアルインターフェイスのいずれかをご使用いいただけます。このコントローラには、ステージの自動PC制御をサポートするためのソフトウェア開発キット(SDK)が同梱されています。このSDKは、他の顕微鏡自動制御アクセサリとステージ操作を連動させたい場合に役に立ちます。 SDKはLabVIEW、 C++、およびMATLABのようなWindowsで起動する全ての主要な開発言語をサポートしており、ActiveXライブラリもしくは標準的なダイナミックリンクライブラリ(DLL)形式となっております。
複数のユニットも、標準のUSBハブを介して、1台のパソコンへ接続することができます。 例えば、XYステージMLS203用コントローラBBD302とZ軸ピエゾステージキットMZS500-Eを1台のPCで同時に操作することが可能です。 この特長と使いやすいKinesisまたはAPT™ ソフトウェアにより、短い時間で複雑な動作シーケンスをプログラムし、実行できます。 コントローラBBD302の詳細は、上の「仕様」タブ をご覧いただくか、ブラシレスDCコントローラのページをご参照ください。
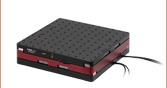
Click to Enlarge
ブラケットセットMLSA01でブレッドボードに取付けられたステージMLS203-1

当社では、ステージMLS203-1をNikon製、Olympus製、および当社の正立および倒立顕微鏡に取り付けるためのブラケットをご用意しています。各顕微鏡との適合性については下の表をご参照ください。各ブラケット(CSA1000を除く)には顕微鏡へのステージの取付け方法を記載した説明書が付いています。なお、ステージMLS203-2はブラケット無しでZeiss社製顕微鏡Axio Observer またはAxiovertに直接取り付けることができます。
また、自作の顕微鏡や一般的なフォトニクス実験のサポート用として、MLS203ステージをブレッドボードに取り付けるための製品を2種類ご用意しています。ライザープレートMLSA01はステージMLS203-1に対応しており、これを使うとステージの高さが31.5 mm上がります。アダプタMLSA04はステージMLS203-1およびMLS203-2に対応しており、ステージ底部に取り付けます。中央開口部をブロックしてしまいますが、ステージの高さは0.7 mmしか上がらないため、高さが制限されている場合には適しています。
| Click Image for Details |  |  |  |  |  |  |  |  |  |
| Item # | CSA1000 | MLSA02 | MLSA09 | MLSA08 | MLSA03 | MLSA06 | MLSA07 | MLSA01 | MLSA04 |
| Stage Item # | MLS203-1 | MLS203-1 | MLS203-1 | MLS203-1 | MLS203-1 or MLS203-2 | ||||
| Microscope Brand | Thorlabs | Olympus | Nikon | Optical Breadboard, Custom Configurationa | |||||
| Microscope Model | Cerna® | IX51, IX71, IX73, IX81, IX83 | IX70 | BX41, BX43, BX51, BX53, BX61 | TE2000, Eclipse Ti | 50i, 80i, 90i, Ci-L | Eclipse FN1 | N/A | |
| Microscope Type | Upright | Inverted | Inverted | Upright | Inverted | Upright | Upright | N/A | |
当社ではOlympus、Nikon、Zeiss、Leicaの顕微鏡に対応する製品をご用意しております。お手持ちの顕微鏡が上の表に記載されていない場合、対応可能なブラケットの入手可能性については当社までお問い合わせください。 |
倒立顕微鏡用スライド/ペトリ皿ホルダMLS203P2

Click to Enlarge
- 直径30 mm~60 mmのペトリ皿に対応
- 幅25 mm~26.5 mmのスライドに対応

Click to Enlarge
ステージMLS203とスライドガラス/ペトリ皿ホルダMLS203P2を組み合わせた構成

Click to Enlarge
倒立顕微鏡に取り付けられたステージMLS203とMLS203P2
倒立顕微鏡用マルチスライドホルダC4SH01

Click to Enlarge
- プラスチックホルダは標準的な顕微鏡スライド(サイズ25 mm × 75 mm、厚さ1.1 ± 0.2 mm)を取付け可能
- 自動組織解析および組織マイクロアレイ解析用のスライドを最大4枚取り付け可能
- マルチウェルプレート(127.6 mm × 85.5 mm)と同じサイズ
- アダプタープレートMLS203P1(下記参照)が必要


Click to Enlarge
倒立顕微鏡に取り付けられたステージMLS203、プレートアダプタMLS203P1付きC4SH01
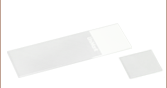
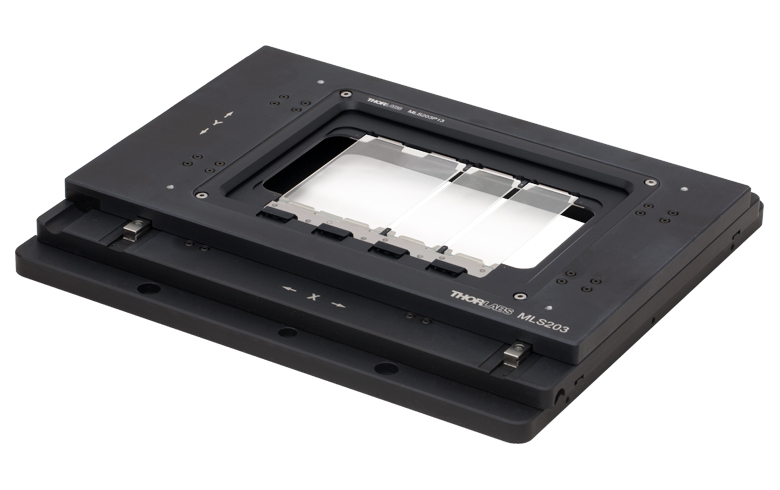
正立および倒立顕微鏡用マルチスライドホルダMLS203P10

Click to Enlarge
- 26 mm x 76 mmまでの標準的な顕微鏡用スライドに対応
- 最大4枚のスライドを取付け可能
- 精密なバネ式スライド保持機構
- スライドに対する対物レンズのアクセスが双方向から可能
- XY移動面における高い平行度
Click to Enlarge
ステージMLS203とマルチスライドホルダMLS203P10を組み合わせて、4枚のスライドを取付け

Click to Enlarge
倒立顕微鏡に取り付けられたステージMLS203とマルチスライドホルダMLS203P10
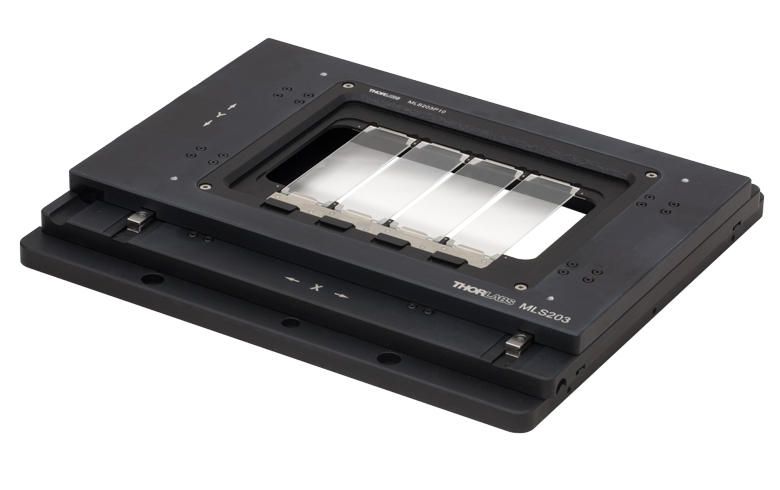
正立および倒立顕微鏡用マルチスライドホルダMLS203P13

Click to Enlarge
- 顕微鏡用スライドは54.5 mm x 76.7 mm(最大)を1枚、および26 mm x 76.7 mm(最大)を2枚まで保持可能
- または26 mm x 76.7 mm(最大)のスライドを4枚まで保持可能
- 精密なバネ式スライド保持機構
- スライドに対する対物レンズのアクセスが双方向から可能
- XY移動面における高い平行度
Click to Enlarge
ステージMLS203上にマルチスライドホルダMLS203P13を取り付け、3枚のスライドを保持

Click to Enlarge
倒立顕微鏡に取り付けられたステージMLS203とマルチスライドホルダMLS203P13
MLS203ステージこちらのアクセサリープレートは光路周りの柔軟な配置に使用可能な高剛性スタンド にも取り付け可能です。
マルチウェルプレートアダプタMLS203P1
Click to Enlarge
- C4SH01および標準ウェルプレートに対応
- クリップホルダで試料を固定
ブランクアダプタープレートMLS203P3 
Click to Enlarge
- 特注仕様や特殊用途に使用可能
- 穴あけ、ネジ切り加工が容易
ブレッドボードプレートMLS203P4とMLS203P5 
Click to Enlarge
- 35個のミリ規格のネジ穴
- MLS203P4(ミリ規格): 中心間隔25 mmにM6×1.0タップ穴
- インチ規格は1インチの中心間隔に1/4"-20タップ穴
使用例1
Click to Enlarge
マルチウェルプレートアダプタMLS203P1を取り付けたステージ
使用例 2

Click to Enlarge
ブランクアダプタープレートMLS203P3を取り付けたステージ
使用例 3

Click to Enlarge
ブレッドボードプレートMLS203P4を取り付けたステージ

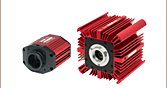
 ズーム
ズーム- MLS203ステージとの使用に適しています。
- USB HIDプロトコルを使用した信頼性の高いジョイスティック
- ジョイスティックノブによる2軸制御
- 高速または高精度の動作を実現する2種類のモード
- 感度調整のための速度ダイヤル
- リモート手動操作が可能
- PCを用いて再プログラム可能
- 人間工学に基づいた設計
ジョイスティックコンソールMJC2は、顕微鏡向けに設計されており、MLS203ステージ他のXY移動ステージを手動で直感的に位置決めできます。このコンソールはXY制御に便利な2軸ジョイスティックです。ほとんどの用途では、コントローラにデフォルト値として保存されたパラメータの設定が利用できるので、ユーザ自身による設定が不要です。したがってホストPCに接続する必要がない真のリモート操作が実現できます。PCを使用してパラメータを再設定したとき、それをペアリングしたコントローラにも保存できます。そのため、PCとの接続を外してもリモート操作を継続できます。
ジョイスティックMJC2は、当社のベンチトップ型ブラシレスDCモーターコントローラ、ラックマウント型ブラシレスDCサーボコントローラ、ブラシレスDCモーターコントローラーモジュール、ステッピングモーター用コントローラに対応します。これらのコントローラやUSB HIDクラスを使うセットアップと組み合わせて使用できるように、ジョイスティックにはMini-DINポートとUSB Type-Cポートの両方が付いています。また、6ピンMini-DINプラグ-プラグケーブルとUSB 3.1 Type-A - Type-Cケーブルの2本のケーブルが付属します。USB HIDを使用したジョイスティックの設定やセットアップの詳細は、型番横の赤いアイコン( )をクリックしてマニュアルをご覧ください。このジョイスティックをBBD10xシリーズと使用する場合の対応ケーブルについては当社までお問い合わせください。
)をクリックしてマニュアルをご覧ください。このジョイスティックをBBD10xシリーズと使用する場合の対応ケーブルについては当社までお問い合わせください。