 Products Home
Products Home共振ピエゾモーター付き電動アイリス
- Motorized Irises for Precise Aperture Control
- Open Frame Design for OEM Applications
- Control via Interface Board, GUI, or ASCII Message Calls
- Post and Cage-System Mounting Options
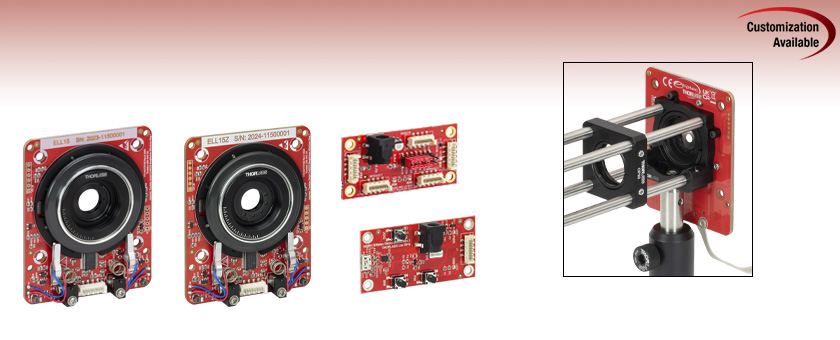
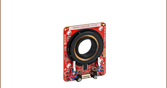
ELL15
Motorized Iris
ELLB
Bus Distributor
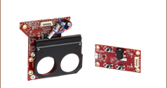
Interface Board
(Included in the ELL15K Bundle, ELL15ZK Bundle, or ELLC2 Accessory Kit)
Post-Mounted ELL15 Motorized Iris in a 30 mm Cage System with Iris Partially Closed
ELL15Z
Motorized Zero-Aperture Iris







Please Wait
| Iris Selection Guide |
|---|
| Post-Mountable Irises |
| Unmounted Irises |
| SM-Threaded Lever-Actuated Irises |
| SM-Threaded Ring-Actuated Irises |
| Cage System Irises |
| Motorized Irises |
Click to Enlarge
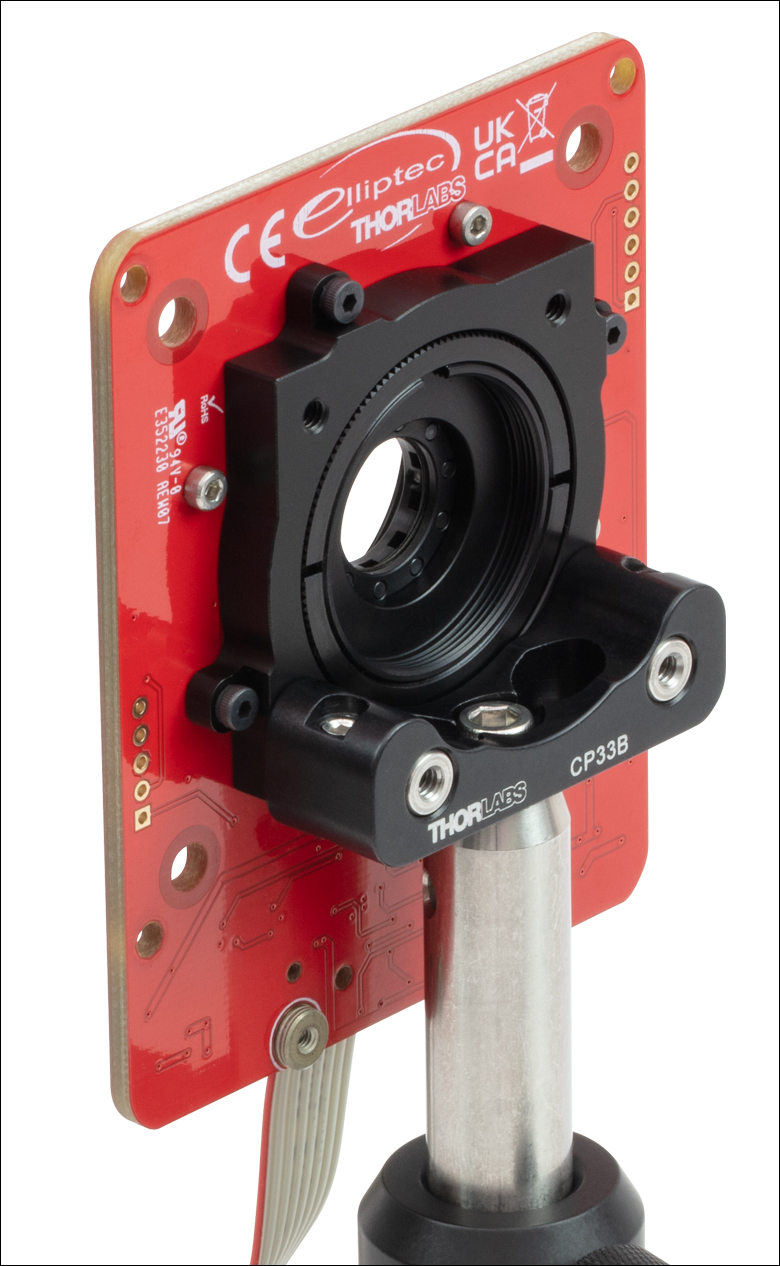
Figure 1.1 電動アイリスは、ブラケットCP33Bを用いてポストに取付けて、光学セットアップ内でご使用いただくことができます。
 製品組み込み用(OEM用)のElliptec技術
製品組み込み用(OEM用)のElliptec技術| Key Specificationsa | ||
|---|---|---|
| Item # | ELL15 | ELL15Z |
| Iris Aperture Range | Ø1.0 - Ø11.5 mm | Ø0.0 - Ø11.5 mm |
| Homing Repeatability | ±0.10 mm | |
| Unidirectional Repeatability | ±0.10 mm | |
| Maximum Closing Speedb | 500 ms | |
| Minimum Incremental Motion | 0.01 mm | |
| Rated Voltage | 4.5 to 5.5 V | |
| Weight of Iris | 100 g | |
| Minimum Lifetime | 1 million Iris Movements | |
| Iris Dimensions | 66.0 mm x 82.5 mm x 19.1 mm (2.60" x 3.25" x 0.75") | |
Click to Enlarge
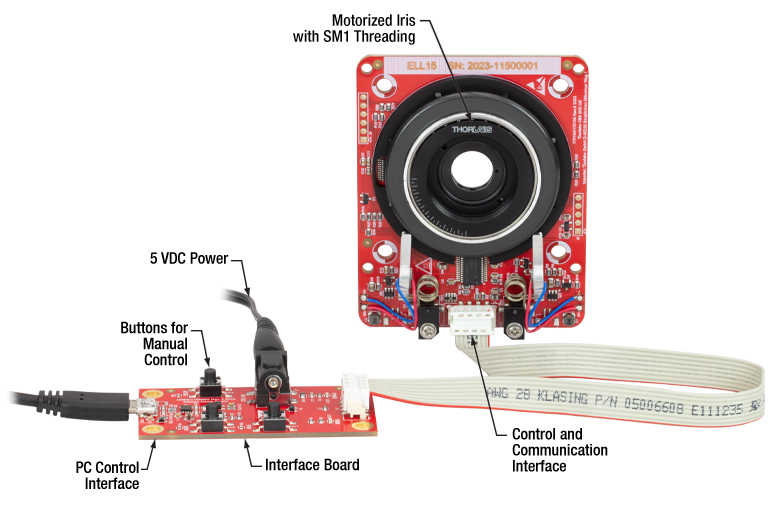
Figure 1.2 電動アイリスセットELL15Kの各コンポーネントを接続した状態。主要部の名称が記載されています。
特長
- 製品組み込み(OEM)用途のほか、高速で精密な絞り調整を必要とする用途に適した製品
- 制御信号用としてMicro-B USBおよびPicoflex®1コネクタ
- マルチドロップ接続用のシリアル通信プロトコルをサポート
- 標準モデルとゼロ開口モデルをご用意
- 30 mmおよび60 mmケージシステムとSM1ネジ付きコンポーネントに対応
- ブラケットCP33Bを用いてポストに取付け可能
- 磁気式エンコーダにより、アイリスの開口径を±0.10 mmの再現性で設定可能
- バス分配器で最大4台までのElliptec®デバイスの制御が可能
- アップグレード用アクセサリーキットELLC2をご用意(下記参照)
当社のElliptec®共振ピエゾモーター技術を用いたこちらの電動アイリスは、精密で再現性のある開口径を必要とする用途に適したコンパクトな製品です。当社では標準モデルである最小開口径がØ1.0 mmの電動アイリスELL15と、Ø0.0 mmまで閉じることができるゼロ開口型の電動アイリスELL15Zの2種類をご用意しています。アイリスは単品(型番ELL15、ELL15Z)、またはセットの一部(型番ELL15K、ELL15ZK)としてご提供しています。このセットには、アイリスを手動制御するためのインターフェイスボード、電源、アイリスとインターフェイスボードを接続するためのケーブル、およびインターフェイスボードとPCを接続するためのケーブルも含まれます。単品のアイリスをセットにアップグレードするためのアクセサリーキットELLC2もご用意しています。
電動アイリスの両側にはSM1内ネジが付いており、接続部を遮光することもできます。 軽量かつコンパクトであり、閉ループ動作をさせることで、設定された開口径を再現性±0.10 mmで実現できます。Figure 1.2に、ELL15Kの各コンポーネントを接続した状態と、その主要部分の名称を示します。 セット品のELL15KとELL15ZKに含まれる主要なコンポーネントは、アイリスを除いてすべて同じです。
モータにはギアがなく、そのためバックラッシュは0.20 mmの小さな値に抑えられています。詳細は「The Elliptec®モータ」タブをご覧ください。電動アイリスは連続動作用としては設計されておりません。デューティ比40%以下での動作をお勧めします。モータに電力が供給されていないときは、停止したモータの2つのアームにより、合わせて約0.01 N·mのトルクでアイリスの位置が保持されます。
こちらの電動アイリスはオープンフレームで、汎用性とシンプルさを兼ね備えています。そのため、ご要件に合ったカスタマイズと大量生産が可能であり、製品組み込み(OEM)用途に適しています。お客様の要件をお知らせいただければ、ご用途やニーズに合ったソリューションをご提案いたします。詳細は当社までお問い合わせください。
制御
こちらの電動アイリスへの電力供給、駆動および制御方法には様々な選択肢があります。詳細は「取扱い」タブ内の「電動アイリスの位置決め」をご覧ください。アイリスには3.3 Vシリアルバスが装備されており、インターフェイスボードの有無にかかわらず操作可能な設計になっています。ピンの割当てについては「ピン配列」タブをご覧ください。当社では、各アイリスを独立にフル制御できるElliptec製品用ソフトウェアをご提供しています。インターフェイスボードをアクセサリとして用いてアイリスの位置を変更した場合、ソフトウェア内でのステータス情報は自動的に更新されます。
| Elliptec Resonant Motor Products | |||||||
|---|---|---|---|---|---|---|---|
 |  |  |  |  |  |  |  |
| Multi-Position Sliders | 28 mm Linear Stage | 60 mm Linear Stage | Rotation Stage | Ø1/2" Rotation Mount | Ø1" Rotation Mount | Ø2" Rotation Mount | Motorized Iris |
複数のElliptecデバイスの制御は、バス分配器ELLBを使用するか、1本のリボンケーブルに複数のコネクタを接続することで可能になります。1個のバス分配器で最大4台までのElliptecデバイスを接続できます。さらに分配器をデイジーチェーン接続することで、最大16台までのデバイスを接続することができます。このバスは、Elliptecソフトウェアが動作しているPCとのインターフェイスボード(下記のセットに付属)を介した接続、Arduino®2またはRaspberry Pi®3ボードとの接続、あるいはお手持ちの制御ボードとのコネクターピンを介した接続の3つの方法のうちのいずれかを用いることで制御できます。そのほか、1本のリボンケーブルに最大16台のデバイスを接続することもできます。各デバイスはインターフェイスボードで同時に制御したり、あるいはElliptecソフトウェアでデバイスを選択して制御したりすることができます。複数のデバイスをリボンケーブルに接続する方法についてはELL15のマニュアルまたはELL15Zのマニュアルを、カスタム接続するときのピン割当てについては「ピン配列」タブをご覧ください。
- PicoflexはMolex社の登録商標です。
- ArduinoはArduino社の登録商標です。
- Raspberry PiiはRaspberry Pi財団の登録商標です。
| Specifications | ||
|---|---|---|
| Item # | ELL15 | ELL15Z |
| Performance | ||
| Iris Aperture Range | Ø1.0 - Ø11.5 mm | Ø0.0 - Ø11.5 mm |
| Minimum Lifetime | 1 million Iris Movements | |
| Recommended Duty Cyclea | 40% | |
| Max Closing Speedb | 500 ms | |
| Unidirectional Repeatability | ±0.10 mm | |
| Homing Repeatability | ±0.10 mm | |
| Backlash | 0.20 mm | |
| Encoder Resolution | 1 000 counts/mm | |
| Minimum Incremental Motion | 0.01 mm | |
| Minimum Motor Holding Torque (Both Motors Engaged) | 0.01 N•m | |
| Electrical | ||
| Rated Voltage | 4.5 to 5.5 V | |
| Typical Current Consumption During Movement | 800 mA | |
| Standby Current | 50 mA | |
| Motor Type | Elliptec® Resonant Piezo | |
| Mechanical | ||
| Mechanical Drawing | ||
| Limit Switches | Electronic and Mechanical | |
| Mounting | 30 mm Cage System: 4-40 Tapped Holes (4 Places) 60 mm Cage System: 3.0 mm Thru Holes (4 Places) Fixed Internal SM1 Threads (2 Places) | |
| 8-Conductor Ribbon Cable Length (Supplied in the Bundles) | 250 mm (9.8") | |
| 8-Conductor Ribbon Cable Length (Maximum) | 3 m (9.8 ft) | |
| Operating Temperature Range | 15 - 40 °C (59 - 104 °F) | |
| Dimensions | 66.0 x 82.5 x 19.1 mm (2.60" x 3.25" x 0.75") | |
| Weight (ELL15 or ELL15Z Only) | 100 g (0.22 lbs) | |


Click to Enlarge
Figure 2.3 インターフェイスボードの外形図
ELL15およびELL15Zのピン配列、コネクタJ1
| ELL15 and ELL15Z Connector J1 Pinouta | ||
|---|---|---|
| Pin | Type | Function |
| 1 | PWR | Ground |
| 2 | OUT | OTDX - Open Drain, Transmit 3.3 V TTL RS232 |
| 3 | IN | RX Receive - 3.3 V TTL RS232 |
| 4 | OUT | In Motion, Open Drain, Active Low, Max 5 mA |
| 5 | IN | JOG/Mode, Active Low, Max 5 V |
| 6 | IN | BW Backward, Active Low, Max 5 V |
| 7 | IN | FW Forward, Active Low, Max 5 V |
| 8 | PWR | VCC +5 V ± 10%; 800 mA |
ELLBのピン配列、コネクタJ1、J2、J3、J4
| ELLB Connector J1, J2, J3, and J4 Pinouta,b | ||
|---|---|---|
| Pin | Type | Function |
| 1 | PWR | Ground |
| 2 | OUT | OTDX - Open Drain Transmit 3.3 V TTL RS232 |
| 3 | IN | RX Receive 3.3 V TTL RS232 |
| 4 | OUT | In Motion, Open Drain Active Low Max 5 mA |
| 5 | IN | Not Connected |
| 6 | IN | Not Connected |
| 7 | IN | Not Connected |
| 8 | PWR | VCC +5 V ± 10%; 800 mA per Connected Device |

Click to Enlarge
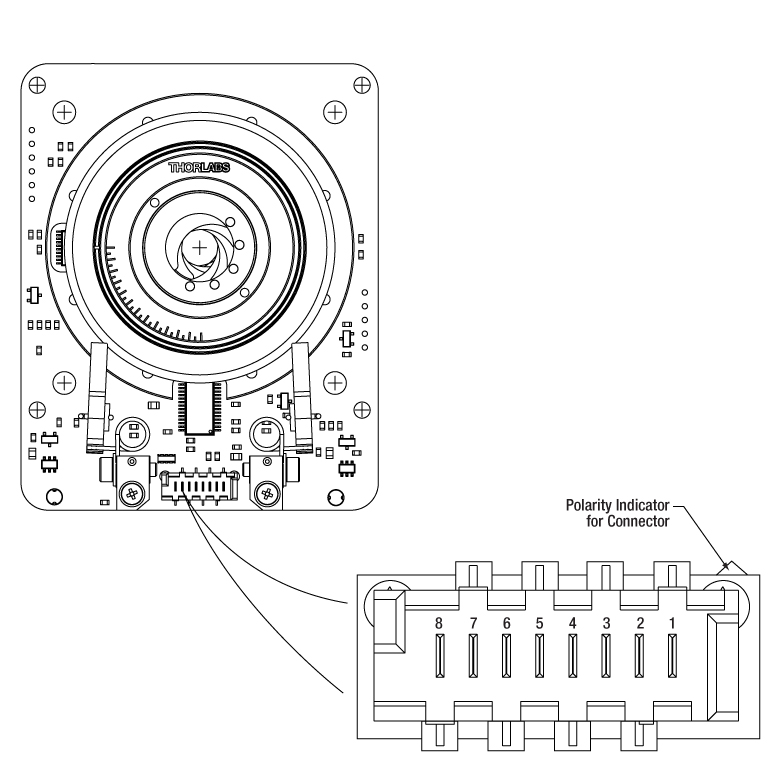
Figure 3.2 Picoflex®コネクタのピン配列図。バス分配器ELLB上でのコネクタの位置も
示しています。コネクタ上の極性を示すマークが、 8ピンコネクタ付き
ケーブルの赤いワイヤに近接するように接続してください。
使用上の注意点
こちらのタブでは、電動アイリスセットELL15KとELL15ZKの取扱いや、取付け、操作方法に関する情報をご覧いただけます。
目次
Click to Enlarge
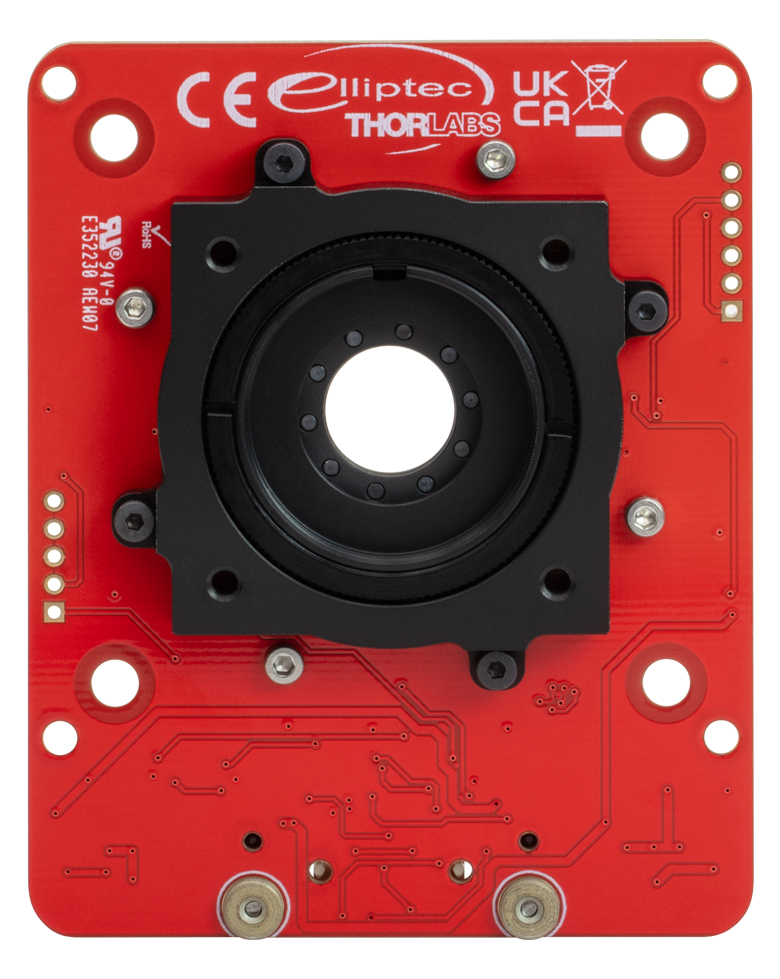
Figure 4.2電動アイリス、背面
Click to Enlarge
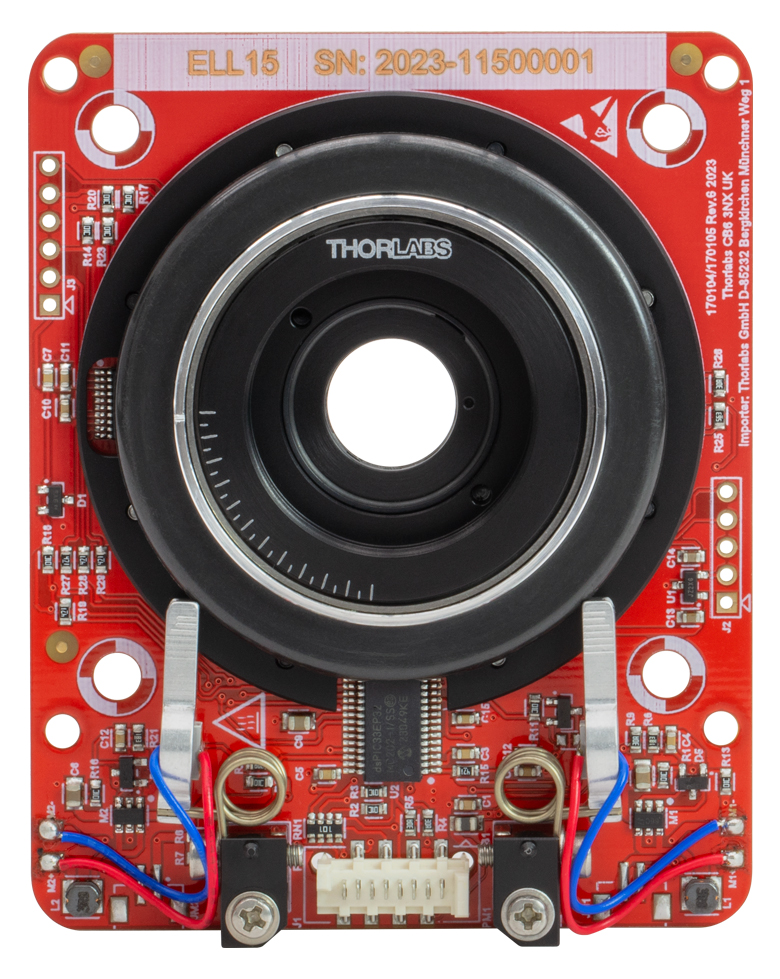
Figure 4.1 電動アイリス、前面
取扱い
ELL15KとELL15ZKの電動アイリスおよびインターフェイスボードは、一般的な取扱いに対しては堅牢に作られています。動作の信頼性を確保するために、モータが接触するプラスチック製のトラックには油、汚れ、埃が付かないようにしてください。電動アイリスを取り扱う際に手袋の着用までは必要ありませんが、トラックに油脂を付着させないために、手指で触れないようにご注意ください。トラックが汚れた場合には、イソプロピルアルコールまたはミネラルスピリット(ホワイトスピリット)で汚れを拭き取ってください。アセトンはプラスチック製のトラックに損傷を与えますので使用しないでください。
ELL15とELL15Zはオープンフレームですが、8 kVまでの静電気放電(ESD)には耐えられます。 しかし、静電気放電(ESD)によって電気信号が誘起され、アイリスが意図しない動きをする可能性がありますので、ESDに対する予防策は講じてください。ボードに500 gを超える曲げ荷重を加えるとPCBが変形し、電動アイリスの性能が劣化します。アイリスのホーミングおよび位置決めには、磁気センサから読み取った情報が使用されるため、PCBの構造に過大な荷重を加えたり、磁界を印加したりしないでください。ホーミングおよび位置決めに悪影響を及ぼさないために、磁気センサ付近の磁界の強さは±5 mT以下に制限してください。
電動アイリスの取付け
電動アイリスは垂直方向または水平方向のどちらにも取り付け可能です。水平方向に取り付ける場合は、Elliptecモータは上向きになるように取り付けてください。このアイリスには様々な取り付け機能があり、当社のコンポーネントと組み合わせて使用したり、あるいはカスタム仕様のアセンブリ内で使用したりすることができます。60 mm間隔で開いている4つのØ3.0 mm貫通穴を用いれば、当社の60 mmケージシステムに取り付けられます。またこれらの貫通穴にM3ネジを通して、カスタム仕様の構造に取り付けることも可能です。さらに50 mm間隔で開いている4つのØ4.2 mm貫通穴にM4ネジを通して、カスタム仕様のマウントに取付けることもできます。アイリスの背面には30 mm間隔で4つの#4-40タップ穴が開いており、それらを用いて当社の30 mmケージシステムの末端にも取付けられます。アイリスを末端としたくない場合は、ケージシステムアダプタを用いてさらに接続することもできます。これらの取付け穴にケージ取付け用ブラケットCP33Bを取付ければ、ポストにも取付け可能です。
電動アイリスの両面にはSM1内ネジが付いているため、Ø25 mm~Ø25.4 mm(Ø1インチ)レンズチューブを用いてシステムに組み込むことも可能です。
Click for Details
Figure 4.3 電動アイリスは、四隅のØ3.0 mm取付け穴を用いてPCBを両側から2本のケージロッドで挟むことで、60 mmケージシステムに取り付けることができます。
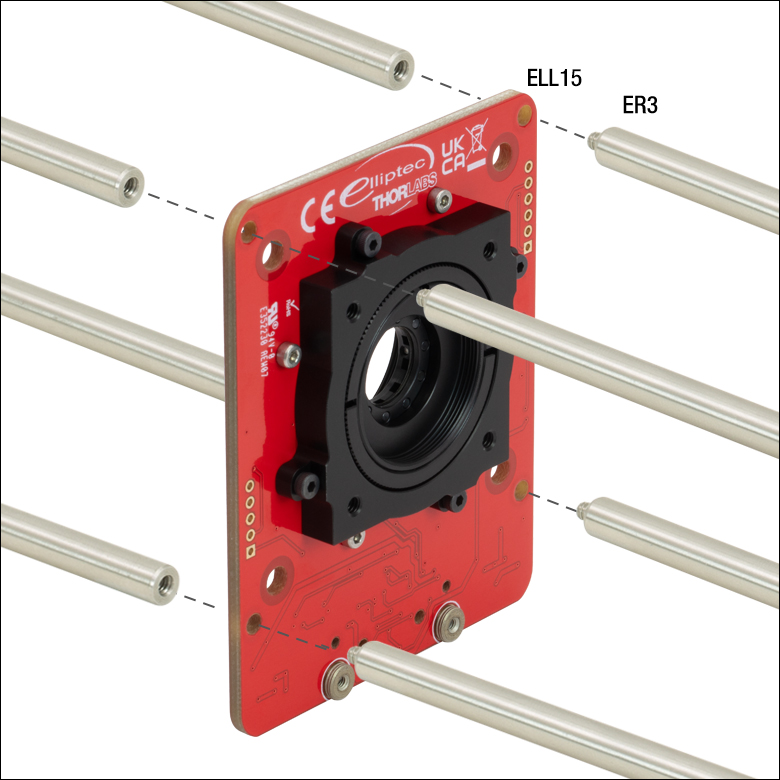
Click for Details
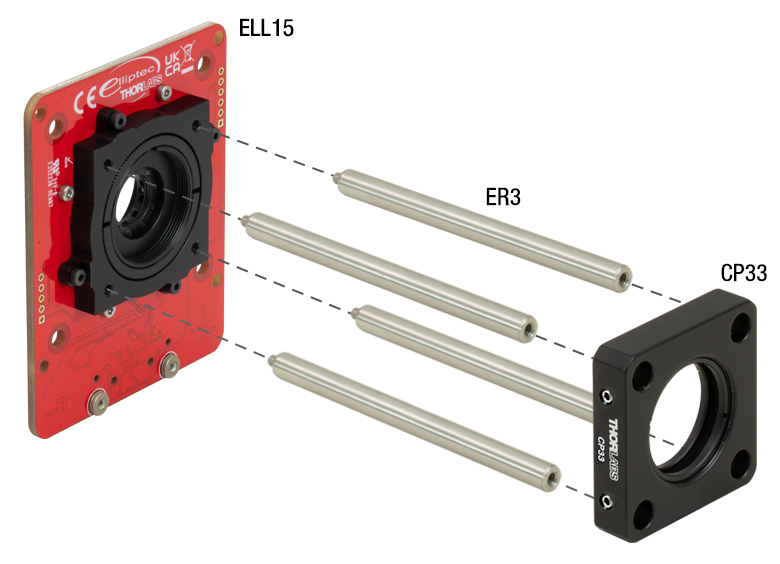
Figure 4.4 電動アイリスは、マウント背面の#4-40タップ穴とERシリーズケージロッドを用いて、30 mmケージシステムに取付けることができます。

Click to Enlarge
Figure 4.5 電動アイリスはポスト取付けが可能で、SM1ネジに遮光用としてSM1レンズチューブを取付けることもできます。
Click to Enlarge
Figure 4.6 電動アイリスの外形図
電力の供給
インターフェイスボードを含むセットアップの場合には、電源はボード上の5 VDC電源ソケットより供給します。インターフェイスボード上の電子回路により、入力されたDC信号は必要とされる共振周波数の正弦波信号に変換されます。
ELL15KとELL15ZKのセットには 5 VDC電源が付属し、そのコネクタはインターフェイスボードの電源ソケットに接続できます。このソケットを介して電力を供給すると、Micro-B USBコネクタをUSBケーブルでPCに接続するために使用できるので、アイリスをリモート制御することができます。USB 2.0接続でPCから供給される電力では、アイリスを駆動するのに十分ではありません。
インターフェイスボードを使用しない場合には、電動アイリスのボード上にあるPicoflex®コネクタのピンを介して電力を供給することができます。 このコネクタのピン配列は「ピン配列」タブに記載されています。電動アイリスへの電力供給やアドレス指定に関する詳細は、ELL15のマニュアルやELL15Zのマニュアル、通信プロトコルマニュアルをご参照ください。
モータの動作
電動アイリスの動作は、ピエゾ素子を特定の超音波周波数で振動させることにより制御します。個々のモータには、アイリスを開く方向に動作させる固有の共振周波数と、アイリスを閉じる方向に動作させる共振周波数があります。モータを一方の共振周波数で駆動すると、モータの先端は小さな楕円形の経路に沿って時計回りに連続的に動きます。モータをもう一方の共振周波数で駆動すると、先端は同じ経路を反時計回りに動きます。どちらの共振周波数も100 kHz付近です。モータ先端の総変位量は、駆動する機械的負荷とピエゾ素子に供給される電圧に依存します。負荷を付けずに最大電圧5 Vの共振周波数で駆動すると、モータの先端は数μm以下の伸縮動作を行って楕円を描きます。 「Elliptec®モータ」タブでは、モータについての詳細情報や動作原理を説明する動画をご覧いただけます。
電動アイリスのホーミング
Click to Enlarge
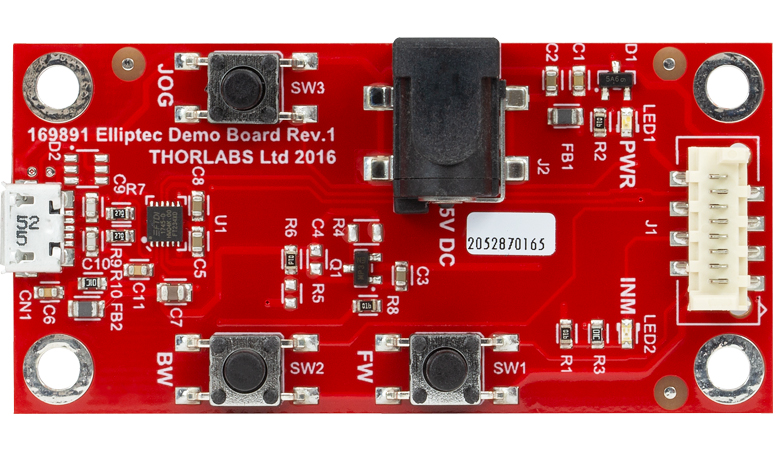
Figure 4.7 インターフェイスボード

Click to Enlarge
Figure 4.8インターフェイスボードの機能概要
ホーミングは反射(赤外光)を利用した光学センサによる位置の粗調整と、それに続く磁気式センサによる微調整の組み合わせにより行います。
アイリスのホーミングは、インターフェイスボード上のBWボタンの押下、Elliptecソフトウェアのグラフィカルユーザーインターフェイス(GUI)内のHomeボタンのクリック、または通信プロトコルマニュアルに記載されている適切なASCIIメッセージの送信によって実行されます。
ホーム位置の初期設定は最大開口径(Ø11.5 mm)になっています。ホーム位置は、必要に応じて、デフォルトの位置から最小開口径のØ1.0 mm(型番ELL15)またはØ0.0 mm (型番ELL15Z)までの範囲で再設定することができます。 初期設定により、デバイスの起動時には自動的にホーム位置に戻ります。この機能は、通信プロトコルマニュアルに記載されているコマンドによって非アクティブ化することもできます。自動ホーミング機能を非アクティブ化にすると、JOG移動前にアイリスをご自身でホーミングする必要があります。
電動アイリスの位置決め
この電動アイリスは連続動作用としては設計されておりませんのでご注意ください。 一般的な用途では、デューティ比40%以下で動作させることをお勧めします。また、デューティ比60%以上での動作は数秒以下に制限してください。
アイリスは、自動ホーミング機能を非アクティブ化していなければ、起動時には自動的にホーム位置に戻ります。詳細は前のセクションをご参照ください。アイリスの動作は Elliptec®ソフトウェアパッケージ(ダウンロード可能)を介したPC制御、またはアイリスボードのデジタル信号線に単純な信号を送信することで制御できます。ソフトウェアと付属文書のダウンロードリンクは「ソフトウェア」タブにございます。
アイリスを開閉するステップサイズのデフォルト値は0.5 mmですが、Elliptecソフトウェアを使用するか 通信プロトコルマニュアルで規定されている適切なASCIIメッセージを送信することでカスタマイズできます。アイリスの開閉はジョグ動作で行うほかに、Elliptecソフトウェアを用いて開口径を絶対値あるいは相対値で設定することも可能です。また前述のとおり、ソフトウェアを用いれば、ジョグ動作のステップサイズの設定、アイリスの位置の読み取り、さらにホーム位置の調整を行うことも可能です。インターフェイスボードには、1つの開口径の設定を保存し、それを簡単に再読み込みする機能があります。詳細はELL15のマニュアルまたはELL15Zのマニュアルをご参照ください。
磁気センサから読み取った情報は、アイリスの位置決めやホームコマンドを実行する際に使用されます。アイリスの開口径はØ1.0 mm~Ø11.5 mm(型番ELL15)またはØ0.0 mm~Ø11.5 mm(型番ELL15Z)に制限されています。最小ステップサイズは0.01 mm、再現性は±0.1 mmです。
複数のElliptecデバイスは、バス分配器ELLBを使用するか、複数のコネクタを1本のリボンケーブルに接続することで制御できます。1個のバス分配器で最大4台までのElliptecデバイスを接続できます。さらに分配器をデイジーチェーン接続することで、最大16台までのデバイスを接続することができます。このバスは、Elliptecソフトウェアが動作しているPCとのインターフェイスボード(下記のセットに付属)を介した接続、Arduino®またはRaspberry Pi®ボードとの接続、お手持ちの制御ボードとのコネクターピンを介した接続の3つ方法のうちのいずれかを用いることで制御できます。なお、インターフェイスボードをご使用の場合、ボード上のボタンは無効になります。そのほか、1本のリボンケーブルに最大16台のデバイスを接続することもできます。各デバイスはインターフェイスボードで同時に制御することもできますし、Elliptecソフトウェアでデバイスを選択して制御することもできます。複数のデバイスをリボンケーブルに接続する方法についてはマニュアルを、カスタム接続するときのピン割当てについては「ピン配列」タブをご覧ください。ソフトウェアで各デバイスを個別にアドレス指定する方法については、通信プロトコルマニュアルをご参照ください。ソフトウェアと付属文書のダウンロードリンクは「ソフトウェア」タブにございます。
共振周波数
負荷、製作公差、その他の機械的なばらつきなどにより、モータの共振周波数の初期設定値が、そのモータにとって最良の性能を発揮させるものではない場合があります。その場合は、ElliptecソフトウェアGUIのメイン設定画面、またはシリアル通信ライン(SEARCHFREQ_MOTORXメッセージ)を用いて、共振周波数を探索することができます。それにより、開動作および閉動作に最適な周波数が得られます。最適な共振周波数の探索はいつでも実行可能です。適切な性能を維持するために、負荷や周囲温度が変化したときには、この探索作業を実行することをお勧めします。詳細はELL15のマニュアルまたはELL15Zのマニュアルをご参照ください。
Click to Enlarge
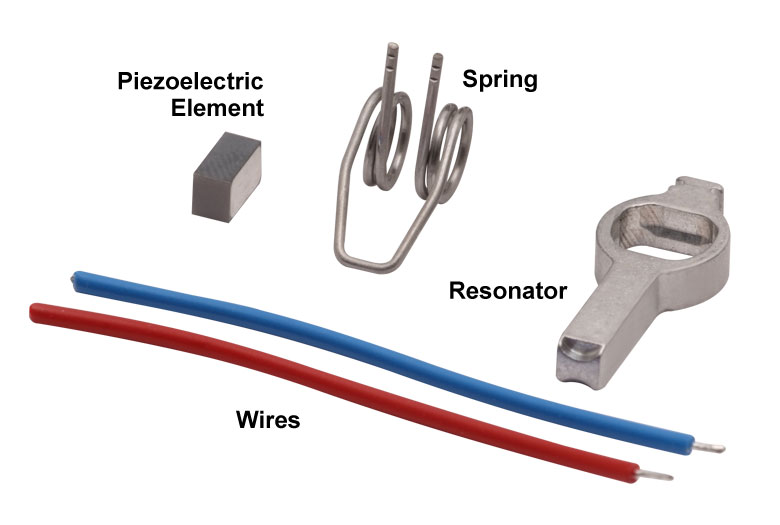
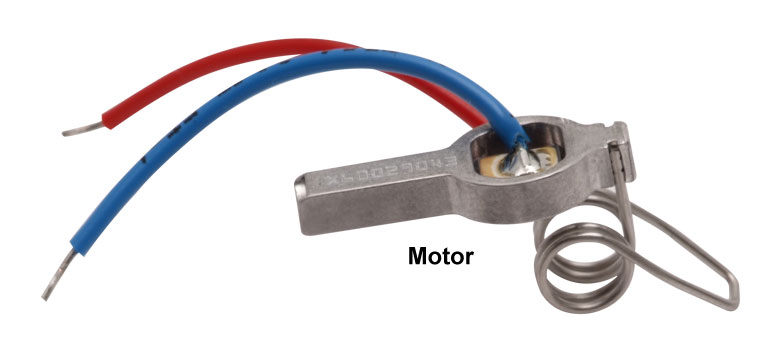
Figure 5.2 Elliptecモータの部品
Click to Enlarge
Figure 5.1 Elliptec共振ピエゾモータ
Elliptec®共振ピエゾモータ
Figure 5.1に示した当社のElliptec®共振ピエゾモータの質量は1.2 gと軽量で、共振器筐体の寸法はバネを除いて8 mm×4 mm×20 mmとコンパクトです。
モータの部品
モータを構成する部品はFigure 5.2でご覧いただけます。ピエゾ素子はアルミニウム製の共振器内に圧入されています。共振器はその先端が必要とされる楕円形の動作をし、駆動されるモジュールと適切に接触するよう精密設計・精密加工がなされています。バネの自由端側は共振器筐体に組み込まれています。ピエゾ素子の上部ならびに底部にはんだ付けされているワイヤには、ピエゾ素子を超音波周波数で振動させるための電圧信号を供給します。
モータをシステム内に組み込むときは、バネの開ループ側を駆動される対象物に対して動かない頑丈な面に固定し、共振器の先端は対象物に接触させます。バネの目的は共振器の先端と駆動対象物との接触を一定に維持することです。また移動方向はピエゾ素子を駆動する2つの共振周波数によって決まります。
楕円形の動作と一般的なモータとの比較
このモータは、2つの共振周波数のうちのいずれかで駆動することにより動作します。超音波周波数で振動する電圧信号がピエゾ素子に印加されると、ピエゾ素子はその電圧信号の周波数に合わせて1 µm以下のレベルで伸長し、また元の寸法にまで収縮します。ピエゾ素子の寸法がこのように高速のサイクルで変化すると、アルミニウム製の共振器に振動が発生します。この振動が筐体の共振周波数のうちの一方の周波数で生じているときに、モータの先端に押す動作が発生します。もう一方の共振周波数で振動するときは、引っ張る動作が発生します。
動画に示されているように、モータが共振状態で動作している時にはその先端が楕円形の軌跡を描き、それによってこの引っ張る動作と押す動作が発生します。また、楕円の回る方向は選択された共振周波数によって決まります。モータの先端は楕円の半分を描くときは伸び、残りの半分を描くときは縮みます。モータが対象物を押すときは、先端が伸びるときに先端と対象物が接触し、縮むときには接触しません。モータが対象物を引っ張るときは、逆の動作をします。モータ先端の総変位量は、駆動する機械的負荷とピエゾ素子に供給される電圧の両方に依存します。駆動電圧のピーク値が5 Vのとき、最大変位量は数µmまで大きくなる可能性があります。
このモータはDCモータあるいは電磁ステッピングモータと同じように動作しますが、従来のモータの様々な欠点がありません。従来の電磁モータを停止させるには慣性に伴う遅延を克服する必要がありますが、非常に動的特性に優れたElliptecモータでは数マイクロ秒で停止できます。ギアがないため、バックラッシュも発生しません。磁石も無いため、電磁障害に敏感な用途にも使用できます。駆動される対象物の動きは連続的でスムーズです。駆動対象物を動かすにはモータの先端をそれと接触させる必要があるため、モータには摩擦ブレーキという安全機能が備わっています。プラスチック面に接している場合は、モータは静かに動作します。
製品組み込み(OEM)用途のためには、低コストに抑えるためモータを大量生産し、低価格のアナログ電子回路で駆動することもできます。マイクロプロセッサやソフトウェアは必要ありませんが、対応は可能です。
Click to Enlarge
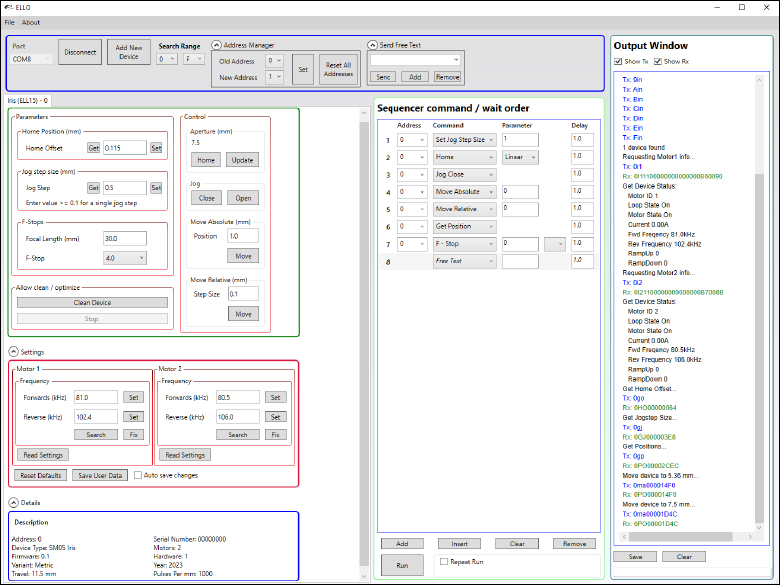
Figure 6.1 ELL15用Elliptec共振ピエゾモータコントロールソフトウェアGUI
Elliptec®共振ピエゾモータ用ソフトウェア
Elliptec®共振ピエゾモータをベースとするすべてのデバイスは、直感的なGUIを特長とするElliptecシステムソフトウェアで制御可能です。C#フォーマットのソースコードがダウンロード可能なソフトウェア一式に含まれており、あらゆる言語でカスタム仕様のアプリケーションを作成することができます。Figure 6.1はGUIのスクリーンショットです。また下のボタンをクリックするとダウンロードのページがご覧いただけます。
コマンドはGUI画面のSequencer command / wait orderに入力します。デバイスに送るコマンドの例として、「Aho0」はアドレス「A」の回転ステージを時計回りにホーム位置に動かすコマンドで、「Afw」はアドレス「A」のステージをジョグを増加させることで前方に動かします。コマンド「As1」は、アドレス「A」のモータ1に対して、 現在の動作条件に適した共振周波数の検出作業を実施します。
ソフトウェア
バージョン 1.6.5 (2025年5月6日)
操作が簡単なGUI付きのElliptecシステムソフトウェアが含まれます。Elliptecソフトウェアパッケージ用通信コマンドを説明した文書もダウンロード可能です。

レーザービームをアライメントする方法
レーザを光学系に取り付ける場合、まず行うべきは、所望の光路設定をするためビームの水平度と方向を調整することです。このようにして設定されると、ビームをうまく迂回させてシステム内の光学素子を透過するように誘導できるだけでなく、システムのアライメントを調整することによって得られる結果が予測しやすくなり、再現性が高くなります。下記のセクションではそれぞれの方法について説明しています。
実験および機器についての「Insights-ヒント集」はこちらからご覧いただけます。
レーザービームのポインティング角度を水平にアライメントする方法
0:00 - はじめに
1:25 - レーザービームのポインティング角度を水平にし、アライメントする方法
4:09 - ビームを迂回させて任意の光路にアライメントする方法
Click to Enlarge
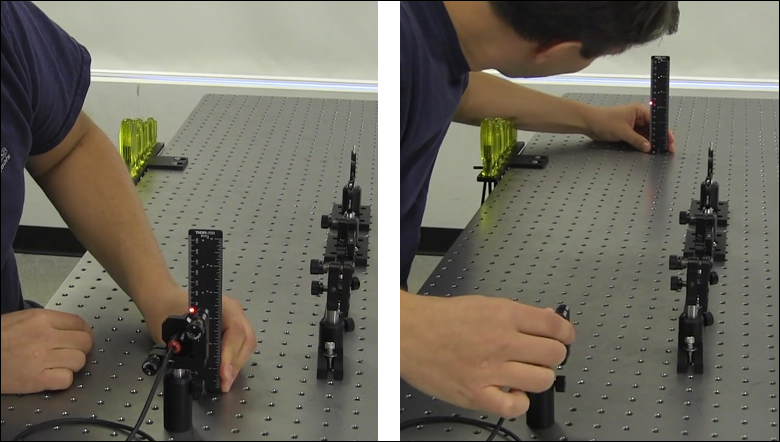
Figure 196C ビームは、光学テーブルのタップ穴のラインに対して平行になるようアライメントすることができます。キネマティックマウントのヨー調整でビーム角度を調整し、ルーラをタップ穴のラインに沿ってスライドさせるときに、ビームの照射位置が横方向で動かないようにします。
Click to Enlarge
Figure 196B ビーム方向を光学テーブルの表面に対して水平にするには、レーザ用キネマティックマウントのピッチ調整を使用します(Figure 196C)。ビームがテーブル表面に対して平行になっている状態は、ビーム高がレーザ前面に近い位置(左)と遠い位置(右)でパワー測定値が同じであることを確認することで行います。
キネマティックマウントのピッチ(チップ)とヨー(ティルト)を調整することで、レーザ角度の微細な補正を行うことができます。この角度調整は、コリメート光を光学テーブル表面などの基準面に対して、あるいはテーブルのタップ穴のラインに沿ってなど基準面内の特定の方向に対してアライメントするときなどで行います。
マウントのアジャスタを使用する前に
まず、キネマティックマウントの各アジャスタを回して移動範囲の中央に移動させます。これにより調整範囲が足りなくなるリスクが少なくなります。また調整範囲の真ん中にアジャスタがあると、マウントのポインティング安定性が良くなります。
その後、レーザを支えるポストやポストホルダなどのオプトメカニクス部品を調整することで、レーザの高さ、位置、向きの粗調整を行います。 調整後はすべてのロックネジが締め付けられていることを確認してください。
ビームをテーブル表面に対して平行にする場合
レーザ光のレベル調整のため、アライメントツールを用いて、マウントのピッチアジャスタによる微細な調整を繰り返す必要があります。
まず光源から近い位置と遠い位置のビームの高さを測定します(Figure 196B)。2つの間の距離が長ければ長いほど、確度は高くなります。2つの位置のビーム高が一致するまで、キネマティックマウントのピッチを繰り返し調整します。
ピッチ調整により光源の高さも変わります。動画の例では、光源に近いビーム高は当初82 mmでしたが、最初のピッチ調整で83 mmに上がっています。
ビームを水平に調整した後は、レーザを支えるオプトメカニクス部品を所望の高さに調整します。または2つのステアリングミラーをレーザの後ろに置き、違う方法でアライメントすることもできます(詳細については同セクション内に記載されています)。ステアリングミラーは特に装置自体の角度調整が難しいレーザ装置のビームの高さと方向の調整に有用です。
ビームをタップ穴列に沿った向きに調整
ビームをテーブルのタップ穴列に対して平行にアライメントする場合もアライメントツールとマウントのヨーアジャスタの反復調整が必要になります。
アライメントツールにより、タップ穴列を基準線として、レーザ出力方向を調整できます。ルーラの底辺の端をタップ穴列に合わせて配置します(Figure 196C)。
テーブル上の基準線に対するビームの角度ズレは、ルーラに照射されるレーザースポット位置とルーラの垂直基準線の差を見ることで確認できます。取付けブラケットBHMA1を使用して水平置き型のルーラを取り付けることができます。
動画では、ルーラをタップ穴列に並行に移動し、レーザ照射位置をルーラーの1 mm単位の目盛の端に一致させるようにアライメントします。ルーラを基準線の遠い方の位置に移動させると、ルーラのビーム位置も水平方向に移動します。ルーラを遠い方の位置に配置した後、ビーム端が1 mm単位の目盛に一致するまでマウントのヨーを調整します。その後ルーラを光源の近くに移動させ、ビームの位置調整の結果を見ます。このプロセスは必要に応じて反復で行われています。
ビームを迂回させて任意の光路に沿ってアライメントする方法
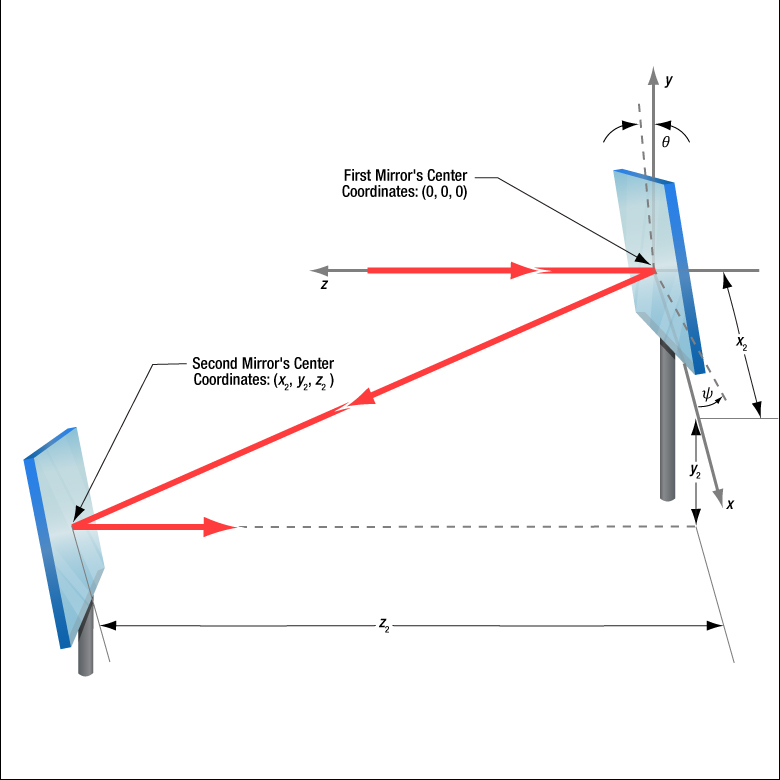
1つ目のステアリングミラーは、新しい光路上に配置された2つ目のミラーに向けてビームを反射します。2つ目のステアリングミラーは、新しい光路に沿うようにアライメントします。2つのステアリングミラーでレーザ光をアライメントする手順は、Walking the Beam(ビームの移動)として説明することがあり、その結果はFolded Beam Path(折りたたまれたビーム路)と呼ばれることがあります。上の動画の例では、ビームを新しい光路にアライメントするために2つのアイリスが使用されています。新しい光路は光学テーブル面に対して平行で、タップ穴列に沿っています。
Click to Enlarge
Figure 196D 1つ目のミラーから反射されたビームは、x軸ならびにy軸まわりに、それぞれθおよびψ回転すれば、2つ目のミラーに入射します。どちらの角度も2つ目のミラーの中心位置(座標x2、y2、z2 )に影響を及ぼします。1つ目のミラーのx軸周りの回転は、マウントのピッチ(チップ)アクチュエータの移動範囲によって制限されますが、その移動範囲は、2つ目のミラーの位置と高さも制限します。
Click to Enlarge
Figure 196F 2つ目のキネマティックミラーマウントのアジャスタは、2つ目のアイリスにビームをアライメントするのに使用します。
Click to Enlarge
Figure 196E 1つ目のキネマティックミラーマウントのアジャスタを調整して、1つ目のアイリスの開口部にレーザースポットを合わせています。
ミラーの高さの設定
1つ目のミラーの中心は、入射路の高さと一致させます。2つ目のミラーの中心は、新しい光路の高さに合わせてください。
アイリスのセットアップ
新しい光路はアイリスによって設定されます。動画では光路がテーブル面に対して水平となるよう、アイリスの高さが一致していることがご覧いただけます。マウント内のアイリスの高さはルーラかノギスを使用すると適度な精度で設定可能です。
アイリスが閉じているときの(小さな)開口部は、完全な中心位置にない場合があります。そのため、アイリスのビームの入力面をひっくり返すと、開口の位置がシフトする場合があります。アイリスのビーム入力面を決めたらセットアップから使用まで同じ面を使用することを推奨します。
コンポーネントの配置と粗調整
まず、両ミラーのアジャスタを回しながら移動範囲の中央に移動させます。1つ目のミラーは入射光路に配置し、2つ目のミラーは新しい光路上に配置します(Figure 196D)。1つ目のミラーのピッチ(チップ)アクチュエータの移動範囲がx周りのミラーの回転(θ )を制限するため、ミラー配置は1つ目のミラーのピッチ(チップ)アクチュエータの移動範囲によって限定されます。2つ目のミラーの位置(x2 、y2 、z2 )を選ぶときは、ピッチに加え、1つ目のミラーのヨー(ティルト)も考慮しなければなりません。2つのミラーは、1つ目のミラーの両アジャスタを移動範囲いっぱいに回さなくてすむよう配置してください。
新しい光路に2つ目のミラーを配置後、両方のアイリスを光路上に置いてください。1つ目のアイリスは2つ目のミラーの近くに、2つ目のアイリスは2つ目のミラーからできるだけ遠くに配置してください。
2つのミラーの高さはそのまま維持し、またヨーのアジャスタは触らずに1つ目のミラーを回転させて、光を2つ目のミラーに向けます。1つ目のミラーのピッチアジャスタを調整して、レーザースポットを2つ目のミラーの中心近くに移動させます。その後、2つ目のミラーを回転させて、ビームを新しい光路にある程度向けます。
最初に光路上に光を当て、その後、向きを調整します。
1つ目のミラーは、2つ目のミラー上にある新しい光路上の点に向けてビームをステアリングするために使用します。まず、1つ目のアイリスに当たるレーザースポットの位置を見ながら1つ目のミラーのアジャスタを調整します(Figure 196E)。アイリスの開口部の中心にレーザースポットが合えば最初のステップは終了です。
次に2つ目のミラーでビームをステアリングして、新しい光路とアライメントさせます。2つ目のミラーのアジャスタを調整して、レーザースポットを2つ目のアイリスの開口部に移動します(Figure 196F)。ピッチアジャスタがビームの高さを調整し、ヨーアジャスタがビームを横方向に移動します。2つ目のアイリスでレーザースポットが消えてしまう場合、2つ目のミラーのレーザースポットが新しい光路から離れています。
1つ目のミラーのアジャスタを調整しながら2つ目のミラー上のビーム位置を変え、1つ目のアイリスの開口部の中心にレーザースポットがあたるようにします。2つ目のミラーのアジャスタ調整を再開して、2つ目のアイリスの開口部にレーザースポットを向けます。これをレーザービームが両方のアイリスの中心を通るまで繰り返します(動画参照)。アジャスタのどれかが調整範囲の制限に近づいてしまったら、ミラーの1つ、あるいは両方の位置を変え、アライメント手順を繰り返してください。
ヨー軸のアジャスタが制限に近づいた場合、反射ビーム方向を記録しておき、ヨーアジャスタを調整範囲の中央に回転させます。反射ビーム方向が記録した位置になるようミラーマウントの向きを変えます。ミラーが回転できない場合、ビームが新しい光路にほぼ沿うよう1つあるいは両方のミラーの位置を変えます。ビームの向きが微細に調整できるまでこのアライメント手順を繰り返します。
ピッチ軸のアジャスタが制限に近づいた場合、2つのミラーの間の距離を長くするか、入射路と新しい光路の高さの差を小さくします。どちらの方法でもアライメント手順が繰り返された後、ピッチアジャスタが調整範囲の中心の近くに配置されます。
| Posted Comments: | |
Hongwei Dai
(posted 2025-05-27 11:16:56.113) Hello! Is it possible to direct communicate with the Iris board without a interface board? I connect ELL15Z to PC through the RS232 port, but it won't work. spolineni
(posted 2025-06-06 05:27:21.0) Thank you for contacting us. Direct communication with the ELL15Z via a PC’s RS232 port without the interface board is not possible, as the iris requires 3.3 V TTL signals, 5 V power, and specialized motor drive signals provided only by the interface board.I will reach out to you directly soon to provide further assistance. Daniel Du
(posted 2023-10-21 13:34:25.46) Hello! Would it be possible to receive a set of two ELL15K packs with the capability for the iris to achieve a minimum diameter of 0.5mm or even smaller? Many thanks! Daniel Du do'neill
(posted 2023-10-26 06:13:33.0) Response from Daniel at Thorlabs. Currently we can not offer this due to the physical limitations of the motors. However I have passed on your request to our engineering team to evaluate for the future. I will reach out to you directly to discuss your application. |

 ズーム
ズーム| Components Included in the Iris Bundles | |
|---|---|
| ELL15K | ELL15ZK |
| ELL15 Motorized Iris | ELL15Z Zero-Aperture Motorized Iris |
| 5 V Power Supply Cable with Region-Specific Power Adapter, 1.5 m Long | |
| Interface Board | |
| 8-Conductor 28 AWG Ribbon Cable, 250 mm Long | |
| USB 2.0 Micro-B Cable, 1.5 m Long | |
| PC-Based Software for Download | |
- 製品組み込み(OEM)のための事前評価試験に適した製品
- セットアップへの組み込みが容易
- 手動やPC制御で操作
- アイリスへの電力供給には付属の電源が必要
電動アイリスセットは、電動アイリスELL15(セット型番ELL15K)またはゼロ開口型電動アイリスELL15Z(セット型番ELL15ZK)を含む、動作に必要なコンポーネント一式のパッケージです。それぞれのアイリスの開口径は、標準のアイリスELL15ではØ1.0 mm~Ø11.5 mmの範囲で、ゼロ開口型のアイリスELL15ZではØ0.0 mm~Ø11.5 mmの範囲で調整できます。ELL15KとELL15ZKのセットを使用すると、電動アイリスを研究室のセットアップや様々な実験に容易に組み込むことができます。 また、この技術をOEM用として組み込むかどうかを判断するための評価用としてもご活用いただけます。

 ズーム
ズーム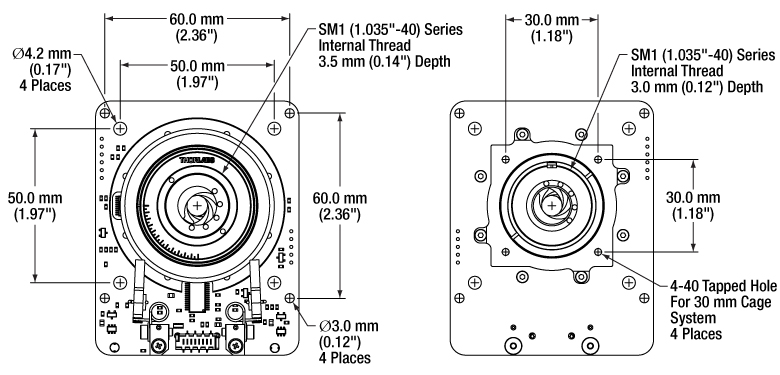
Click to Enlarge
Figure G2.1 電動アイリスの外形図
電動アイリスELL15およびELL15Zは、ネットワーク化された複数のElliptec®共振モーター製品との連携を容易にするために、単独でも使用できるように設計されています。
標準の電動アイリスELL15の開口径は、Ø1.0 mm~Ø11.5 mmの範囲で調整可能です。Ø1.0 mmより小さい開口径が必要な用途向けに、ゼロ開口型の電動アイリスELL15Zもご用意しています。この製品のマウントの仕方やアタッチメントの取付け機能は型番ELL15と同じです(Figure G2.1参照)。
Click to Enlarge
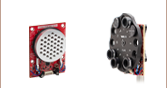
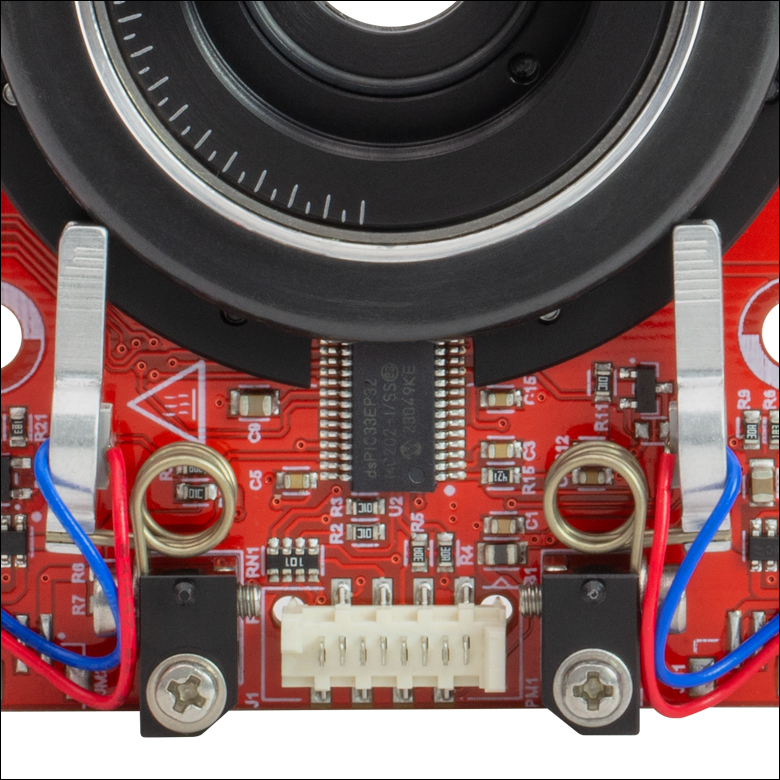
Figure G2.2 モータのアルミニウム製先端は、電動アイリスを取り囲む黒いプラスチック製トラックに接触しています。このトラックには、埃や油を付着させないために、触らないようにご注意ください
アイリスの内側のリングは固定されており、その両面にはSM1ネジが付いています。そのため両側にレンズチューブを取付けて遮光することもできます。取付け穴間隔などの寸法やアイリスのその他の仕様については「仕様」タブをご覧ください。電動アイリスのカスタマイズについては 当社までご相談ください。
この製品では、アイリスを正確かつ高速に制御するために、Elliptec®共振ピエゾモーター技術を使用しています。Figure G2.2のように、2つのモータの先端は電動アイリスを取り囲むプラスチック製トラックにしっかりと接触しています。モータは互いに反対の回転方向に向けて取り付けられており、一方のモータがトラックを押し、もう一方のモータが反対方向に引っ張ることで、時計回り(または反時計回り)に回転します。
電動アイリスは、PCB上にオス型8ピンPicoflex®コネクタ(ヘッダー)と共に組み込まれています。PCB上のコネクタ(ヘッダー)に嵌合するメス型8ピンPicoflex®ネクター(レセプタクル)は付属しています。

 ズーム
ズーム| Specifications | ||
|---|---|---|
| Item # | ELLC2 | |
| DC Voltage Input to Controller | 4.5 to 5.5 V | |
| Typical Current Consumption Per Module | Movement | 800 mA |
| Standby | 50 mA | |
| Operating Temperature Range | 15 to 40 °C | |
| Ribbon Cable Length (1 Included) | 250 mm (9.8") | |
| Dimensions (Interface Board Only) | 66.0 mm x 32.0 mm x 12.5 mm (2.60" x 1.26" x 0.49") | |
| Weight (Interface Board Only) | 10.8 g (0.022 lbs) | |
- 単品のELLシリーズ製品に追加して1組のキットを構成するための下記のコンポーネントのセット
- インターフェイスボード
- USB Micro Bケーブル
- Picoflex®1ケーブル
- 5 V電源、国内対応アダプタ
アップグレード用アクセサリーキットELLC2は、単品のELLシリーズのスライダ、ステージ、マウントをお持ちの場合に、それに追加して上記のようなELLセット一式2とするためのコンポーネントを揃えたキットです。接続されたELLステージの位置は、付属のハンドヘルドコントローラの3つのボタンで制御することができます。またUSBポートと付属のUSB Micro Bケーブルを介して、PCと直接接続することができます。キットには、ハンドヘルドコントローラとELLデバイスを接続するための0.25 mのPicoflex®ケーブル(8負荷回路)と、5 V電源(国内対応アダプタ付き)も含まれています。
- Picoflex®はMolex社の登録商標です。
- ELL17/M、ELL18/MおよびELL20/M用の取付けブラケットのご注文は当社までご連絡ください。
| Included in the ELLC2 Accessory Upgrade Kit | |
|---|---|
| USB 2.0 Micro-B Cable, 1.5 m Long | 5 V Power Supply with Region-Specific Power Adapter, 1.5 m Long |
| Interface Board | 8-Conductor 28 AWG Ribbon Cable, 250 mm Long |

 ズーム
ズーム| Specifications | ||
|---|---|---|
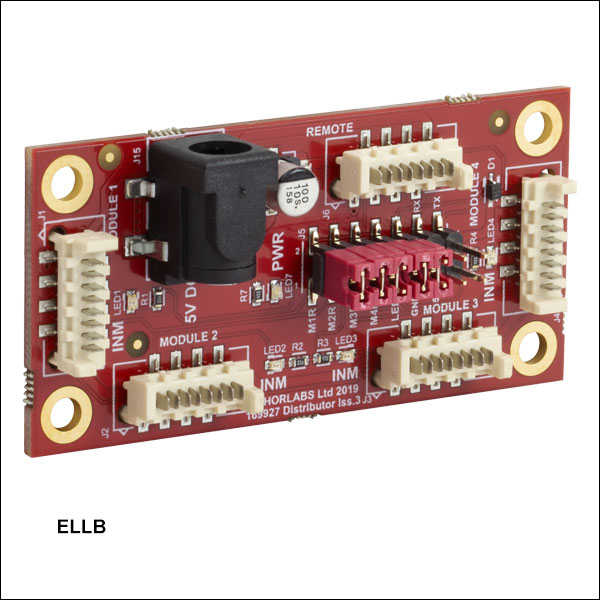
| Item # | ELLB | |
| Voltage Rating | 4.5 to 5.5 V | |
| Typical Current Consumption Per Module | Movement | 800 mA |
| Standby | 50 mA | |
| Maximum Board Current | 4.0 A | |
| Operating Temperature Range | 15 to 40 °C | |
| Ribbon Cable Length (4 Included) | 250 mm | |
| Maximum Supported Ribbon Cable Length | 500 mm | |
| Dimensions | 65.0 mm x 32.0 mm x 12.5 mm (2.56" x 1.26" x 0.49") | |
| Weight | 11 g (0.02 lbs) | |
Click to Enlarge
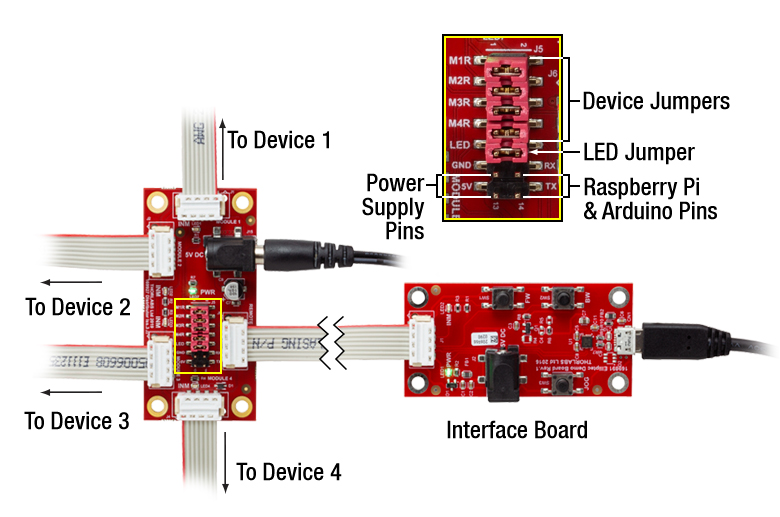
Figure 683A 1個のバス分配器で最大4個のElliptecデバイスを制御できます。バスは上記のセットに付属しているインターフェイスボードでPCに接続可能です。このときバスはElliptecソフトウェアによって制御され、インターフェイスボード上のボタンは無効になっていますのでご注意ください。
- 1つのバスで最大4台までのElliptec®デバイスに対する制御と電源供給が可能
- 分配器をデイジーチェーン接続すると最大16台までのElliptecデバイスを制御可能
- Elliptecシステムソフトウェア(上記の「ソフトウェア」タブ参照)によるリモート制御
- Elliptec製品のセットに付属するUSBインターフェイスボードを使用してPCに接続可能
- ジャンパ5個およびリボンケーブル(8芯、AWG28)4本が付属
- Raspberry Pi®とArduino®ボードにも対応
バス分配器ELLBには、最大4台までのElliptec®デバイスを接続できます。 接続されたデバイスは上記のセットに付属するインターフェイスボードで制御可能ですが、それが無くても制御できます。インターフェイスボードを使用する場合は、接続された各デバイスはElliptecソフトウェアパッケージが動作するPCによってリモート制御されます。インターフェイスボードは、分配器のREMOTEと記載されているバス信号の入力ポートに接続します。この接続を行うと、インターフェイスボードのボタンは無効になります。インターフェイスボードを使用せずにカスタム接続する場合は、「ピン配列」タブをご覧ください。
複数のバス分配器ELLBをデイジーチェーン接続すると、最大16台までのElliptecデバイスに対する制御と電源供給が可能になります。単純に4つの出力ポート(MODULE)の内の1つを、次のボードの入力ポート(REMOTE)に接続するだけで動作します。LEDインジケータによりどのデバイスが動作しているかが示されます。ソフトウェアで各デバイスを個別にアドレス指定する方法については、通信プロトコルマニュアルをご参照ください。ソフトウェアと付属文書のダウンロードリンクは「ソフトウェア」タブにございます。
バス分配器には、最大電流4 Aの5 V電源を接続するためのØ6.3 mm電源コネクタが付いています。より多くのデバイスを接続して各ユニットを同時に制御するには、電源からより多くの電流を供給する必要があります。 各Elliptecデバイスによって消費される電流については、「仕様」タブをご覧ください。5V、2 Aの電源がELL9およびELL12に付属しています。接続されたElliptecデバイスの消費電流に応じて、電源は同時に2つのデバイスに対して電流の供給ができます。
機能を追加するための制御ピンが14個付いています(Figure 683A参照)。ピンの4組のペアがそれぞれジャンパで短絡されているとき、つまりジャンパがセットされているときは、Elliptecソフトウェアは接続されたElliptecデバイスからのフィードバック信号を受信することができます。 LEDと記載されているピンのペアはジャンパで短絡されていますが、これを取り外すとLEDインジケータは無効になります。 5VとGNDと記載されたピンを用いると、Ø6.3 mm電源コネクタに接続された電源の代わりに、お手持ちの5 V、2 A 電源を使用することができます。 RX とTX と記載されたピンを用いると、Elliptecインターフェイスボードの代わりに、Raspberry Pi®やArduino®ボードでバスを制御することができます。
ボードは四隅にあるØ3.5 mm貫通穴を使用して取り付けます。リボンケーブル(8芯、AWG28)は4本付属します。
| Compatible Elliptec Devices | |||||
|---|---|---|---|---|---|
 |  |  |  |  |  |
| Multi-Position Sliders | 28 mm Linear Stage | 60 mm Linear Stage | Rotation Stage | Rotation Mount | Motorized Iris |