 Products Home
Products Home共振ピエゾモーター付き回転マウント、SM2ネジ付き

- SM2-Threaded Rotation Mount with Closed-Loop Positioning
- Open Frame Design for OEM Applications
- Control via Interface Board, GUI, or ASCII Message Calls
- Fully Integrated Drive Electronics
Application Idea
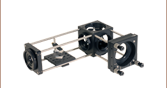
The ELL21K rotates a mounted, SM2-threaded waveplate within a 60 mm cage assembly.
ELLB
Bus Distributor
Interface Board
ELL21K
Rotation Mount
Bundle
(Mount and Board Included)
Rotation Mount for Ø2" or Ø50.0 mm Optics
(Also Available Individually)







Please Wait
| Key Specificationsa | |
|---|---|
| Travel (No Limit Switches)b | 360° Continuous |
| Bidirectional Repeatabilityc | 0.05° (0.87 mrad) |
| Bidirectional Accuracyd | 0.035° (0.61 mrad) |
| Axis Wobblee | 0.032° (0.56 mrad) |
| Max Speedf | 260°/s |
| Max Loadg | Vertical: 100 g (3.5 oz) Horizontal: 300 g (10.6 oz) |
| DC Voltage Input | 4.5 to 5.5 V |
| Minimum Lifetime | 100 km (> 403 000 Revolutions) |
| Mount Dimensions | 92.0 x 115.0 x 21.0 mm (3.62" x 4.53" x 0.83") |
| Mount Weight | 260 g (9.2 oz) |


特長
- Ø50 mmまたはØ50.8 mm(Ø2インチ)光学素子用SM2ネジ付き回転マウント
- 製品組み込み(OEM)用途や精密な高速回転を必要とする用途に適した製品
- 制御信号用としてMicro-B USBおよびPicoflex®1コネクタを使用
- マルチドロップ接続用のシリアル通信プロトコルをサポート
- アブソリュート方式の磁気エンコーダを用いた位置決めマウント(光に敏感なアプリケーションに適合)
- バス分配器で最大4台までのElliptec®デバイスの制御が可能
- M3 x 0.5タップ穴を用いて可動部にアダプタープレートを取り付けることで、様々な取付け機能の追加が可能
- ELLA6/M:ファイバーアライメントアクセサリ用のキー溝が付いたアダプタ
- ELLA7/M:SM1ネジおよび30 mmケージシステム用タップ穴の付いたアダプタ
- ELLA8:フィルタ/光学素子取付け用の5つのSM05ネジ穴の付いたアダプタ
- アップグレード用アクセサリーキットELLC2をご用意(下記参照)
当社のElliptec®共振ピエゾモーター技術を用いたこちらの回転マウントは、光学素子を回転させる用途に適したコンパクトな製品です。回転マウントは単品(ELL21/M)またはセット(ELL21K/M)の一部としてご提供しております。セットには、マウントを手動制御するためのインターフェイスボード、電源、マウントとインターフェイスボードを接続するためのケーブル、およびインターフェイスボードとPCを接続するためのケーブルも含まれます。当社では、単品のマウントをセットにアップグレードするためのアクセサリーキットELLC2もご用意しています。
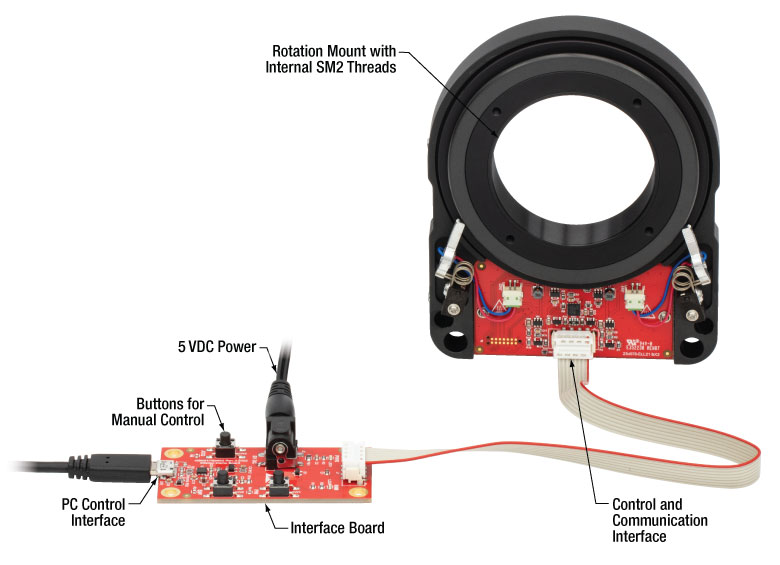
マウントの回転セルにはSM2内ネジが付いており、Ø50 mmまたはØ50.8 mm(Ø2インチ)光学素子を取り付けるための固定リングSM2RRが2つ付属しています。回転マウントは軽量かつコンパクトであり、閉ループ動作をすることで、設定した位置に対する回転の再現性として0.05°が得られます。Figure 1.2に、セットELL21K(/M)の各コンポーネントを接続した状態と、その主要部分の名称を示します。詳細は「Elliptec®モータ」タブをご覧ください。
可動部に取付け可能な別売りのアダプタープレートが3種類あり、それぞれ様々な取付け用のネジ穴や通し穴を有します。アダプタELLA6/Mには30 mmケージシステム用に配置された取付け穴があり、またファイバーアクセサリ取付け用のキー溝があります。ELLA7/Mにも同様の取付け穴があり、ケージシステムの取付けが可能ですが、そのほかに中央にSM1内ネジ付きの穴があります。アダプタELLA8には5つのSM05内ネジ付きポートがあり、マウント付きのフィルタや光学素子の取付けにご使用いただけます。また中央にはØ12.7 mm(Ø1/2インチ)の穴が開いています。
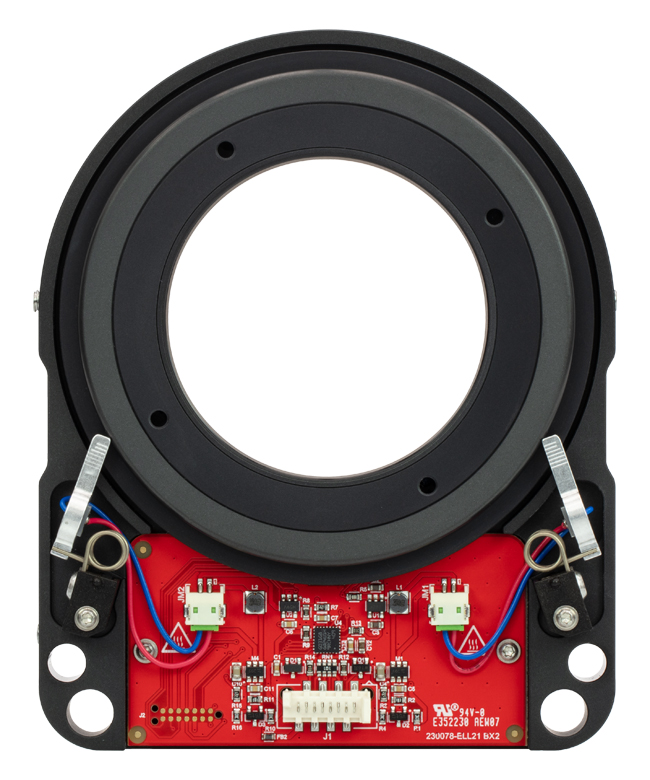
モータは極めて動的特性に優れ、ギアもありません。2つのモータの先端は、Figure 1.2でご覧いただけるように、マウント底部のプラスチック製トラックにしっかりと接触しています。モータは互いに反対の回転方向に向けて取り付けられています。どちらの向きに回転する場合でも、一方のモータがトラックを押し、もう一方のモータが反対方向に引っ張ることで回転します。回転マウントは連続動作用としては設計されておりません。また、デューティ比40%以下で動作させることをお勧めします。モータに電力が供給されていないときは、停止したモータの2つのアームにより、合わせて約0.01 N·mのトルクでマウントの位置が保持されます。
この回転マウントはオープンフレームであるうえ汎用性と単純性を備えているため、お客様のご要件に合ったカスタマイズと大量生産が可能であり、従ってOEM用に適しています。お客様のご要件を当社までお知らせいただければ、お客さまの用途やニーズに合ったソリューションをご提案いたします。
制御
こちらの回転マウントには、電力供給、駆動方法、および制御方法について様々な選択肢があります。詳細は「使用方法」タブ内の「回転マウントの位置決め」をご覧ください。マウントには3.3 Vシリアルバスが装備されており、インターフェイスボードの有無にかかわらず操作可能な設計になっています。ピンの割当てについては「ピン配列」タブをご覧ください。当社では、マウントを個別にフル制御できるElliptec製品用ソフトウェアをご提供しています。インターフェイスボードをアクセサリとして用いてマウントの位置を変更した場合、ソフトウェア内でのマウントのステータス情報は自動的に更新されます。
Click to Enlarge
Figure 1.2 回転マウントセットELL21K(/M)の各コンポーネントを接続した状態。主要部の名称も記載しています。
複数のElliptecデバイスの制御は、バス分配器ELLBを使用するか、1本のリボンケーブルに複数のコネクタを接続することで可能になります。1個のバス分配器で最大4台までのElliptecデバイスを接続できます。さらに分配器をデイジーチェーン接続することで、最大16台までのデバイスを接続することができます。このバスの制御は、Elliptecソフトウェアが動作しているPCとのインターフェイスボード(下記のセットに付属)を介した接続、Arduino®2またはRaspberry Pi®3ボードとの接続、またはお手持ちの制御ボードとのコネクターピンを介した接続の3つの方法のうちのいずれかを用いることで可能になります。そのほか、1本のリボンケーブルに最大16台のデバイスを接続することもできます。各デバイスはインターフェイスボードで同時に制御することもできますし、Elliptecソフトウェアでデバイスを選択して制御することもできます。複数のデバイスをリボンケーブルに接続する方法についてはマニュアルを、カスタム接続するときのピンの割り当てについては「ピン配列」タブをご覧ください。
- PicoflexはMolex社の登録商標です。
- ArduinoはArduino社の登録商標です。
- Raspberry PiはRaspberry Pi財団の登録商標です。
| Elliptec Resonant Motor Products | |||||||
|---|---|---|---|---|---|---|---|
 |  |  |  |  |  |  |  |
| Multi-Position Sliders | 28 mm Linear Stage | 60 mm Linear Stage | Rotation Stage | Ø1/2" Rotation Mount | Ø1" Rotation Mount | Ø2" Rotation Mount | Motorized Iris |
| Specificationsa | |
|---|---|
| Performance | |
| Travel | 360° Continuousb |
| Maximum Speedc | 260°/s |
| Bidirectional Repeatabilityd | 0.05° (0.87 mrad) |
| Bidirectional Accuracye | 0.035° (0.61 mrad) |
| Backlash | 0.018° (0.31 mrad) |
| Encoder Resolution (Absolute Magnetic Encoder) | 65536 counts/rev |
| Minimum Incremental Motion | 0.0055° (96 µrad) |
| Minimum Holding Torque (Both Motors Engaged) | 6.3 cN•m |
| Axis Wobblef | 0.032° (0.56 mrad) |
| Maximum Total Loadg | Vertical: 100 g (3.5 oz) Horizontal: 300 g (10.6 oz) |
| Minimum Lifetimeh | >403 000 Revolutions (100 km) |
| Electrical | |
| Motor Type | Elliptec® Resonant Piezo |
| DC Voltage Input | 4.5 to 5.5 V |
| Typical Current Consumption, During Movement | 800 mA |
| Typical Current Consumption, During Standby | 50 mA |
| Communications | |
| Bus | Multi-Drop 3.3 V/5 V TTL RS232 |
| Connector on Rotation Stage Board | Picoflex® |
| Connectors on Interface Board | Picoflex®, Micro USB, DC Jack [6.3 mm OD (GND), 2.1 mm ID (+5 V)] |
| Speed | 9600 baud |
| Data Length (1 Stop Bit, No Parity) | 8 bit |
| Protocol Data Format | ASCII HEX |
| Module Address and Command Format | Mnemonic Character |
| Mechanical | |
| Mounting Thread | SM2 (2.035"-40) |
| Dimensions of the Rotation Mount Board | 92.0 x 115.0 x 21.0 mm (3.62" x 4.53" x 0.83") |
| Weight of Rotation Mount Board | 260 g (9.2 oz) |
| Environmental Operating Conditions | |
| Temperature Range | 15 to 40 °C (59 to 104 °F) |
| Maximum Relative Humidity (Non-Condensing) | < 80% at 31 °C |

Click to Enlarge
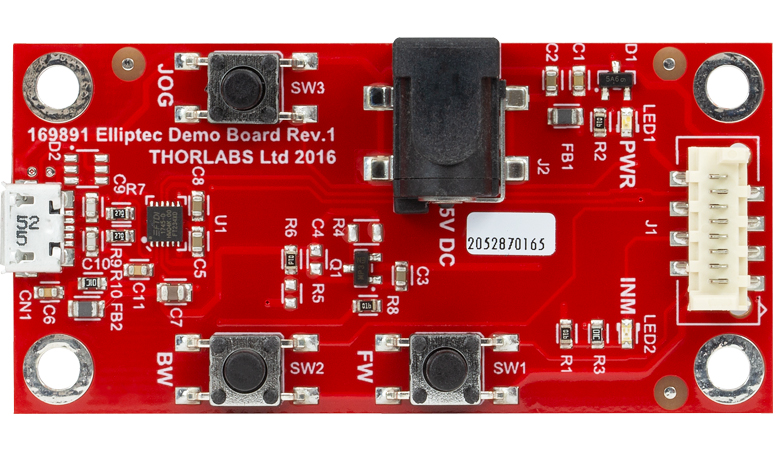
Figure 2.3 インターフェイスボードの外形図
| Connector J1 Pinouta | ||
|---|---|---|
| Pin | Type | Function |
| 1 | PWR | Ground |
| 2 | OUT | ODTX - Open Drain, Transmit 3.3 V TTL RS232 |
| 3 | IN | RX Receive - 3.3 V TTL RS232 |
| 4 | OUT | In Motion, Open Drain, Active Low, Max 5 mA |
| 5 | IN | JOG/Mode, Active Low, Max 5 V |
| 6 | IN | BW Backward, Active Low, Max 5 V |
| 7 | IN | FW Forward, Active Low, Max 5 V |
| 8 | PWR | VCC +5 V ±10%; 800 mA |
| ELLB Connector J1, J2, J3, and J4 Pinouta,b | ||
|---|---|---|
| Pin | Type | Function |
| 1 | PWR | Ground |
| 2 | OUT | ODTX - Open Drain, Transmit 3.3 V TTL RS232 |
| 3 | IN | RX Receive 3.3 V TTL RS232 |
| 4 | OUT | In Motion, Open Drain, Active Low, Max 5 mA |
| 5 | IN | Not Connected |
| 6 | IN | Not Connected |
| 7 | IN | Not Connected |
| 8 | PWR | VCC +5 V ± 10%; 800 mA per Connected Device |

Click to Enlarge
Figure 3.2 Pinout diagram of the Picoflex®コネクタのピン配列図。
バス分配器ELLB上でのコネクタの位置も示しています。コネクタ上の極性を示すマークが、
8ピンコネクタ付きケーブルの赤いワイヤに近接するように接続してください。
使用上の注意点
こちらのタブでは、回転マウントセットELL21K/Mの取扱い方、取付け方法、操作方法などに関する情報をご覧いただけます。
目次

Click to Enlarge
Figure 4.2 回転マウントの背面
Click to Enlarge
Figure 4.1 回転マウントの前面
取扱い
ELL21K/Mの回転マウントとインターフェイスボードは、一般的な取扱いに対しては堅牢に作られています。動作の信頼性を確保するために、モータが接触するプラスチック製のトラックには油、汚れ、埃が付かないようにしてください。回転マウントを取り扱う際に手袋の着用までは必要ありませんが、トラックに油脂を付着させないために、手指で触れないようにご注意ください。トラックが汚れた場合には、イソプロピルアルコールまたはミネラルスピリット(ホワイトスピリット)で汚れを拭き取ってください。アセトンはプラスチック製のトラックに損傷を与えますので使用しないでください。
ESDに対する対策は講じてください。放電によって生じる電気信号によって、マウントが意図しない動きをする可能性があります。位置決めに悪影響を及ぼさないために、磁気センサ付近の磁界の強さは±5 mT以下に制限してください。
回転マウントの取付けと負荷
回転マウントは垂直方向または水平方向のどちらにも取り付け可能です。水平方向に取り付ける場合は、Elliptecモータは上向きになるように取り付けてください。このマウントには様々な取り付け機能があり、当社のコンポーネントと組み合わせて使用したり、あるいはカスタム仕様のOEMアセンブリ内で使用したりすることができます。マウント背面の4つの#4-40ネジ穴の間隔は60 mmになっており、これらを用いて60 mmケージシステムに取り付けられます。各マウントには、ポスト取付け用のM4 x 0.7タップ穴と、テーブル面に平行に取り付けるための1/4インチ通し穴があります。また、ERロッドの取付けや、2つのデバイスを近接して取り付ける際に利用できるØ6 mm貫通穴も2つあります。さらに、ER05ケージロッド用の深さ6.5 mmの2つの止まり穴もあり、これでマウントを近接して取り付ける際のアライメントを確実にできます。

Click for Details
Figure 4.3 回転マウントは、背面の#4-40ネジ穴を使用して60 mmケージシステムに取り付けられます。

Click for Details
Figure 4.4 回転マウントはポストに取り付けることができ、またERケージロッド用の穴は2つのマウントを近接して配置する際にアライメント用として利用できます。
Click to Enlarge
Figure 4.5 回転マウントの外形図
搭載可能な光学素子の最大許容質量は、マウントが垂直の場合は100 g、水平の場合は300 gです。この最大許容質量まで搭載できるのは、負荷がマウントの中心にかかっている場合です。回転マウントの取り付けや負荷の取り付けに際しては、回転マウントの可動部分と干渉するものが無いこと、また動作時にマウントと負荷が揺れないようにしっかり固定されていることを確認してください。ステージや負荷が揺れるとエンコーダーエラーが発生する場合があります。
電力の供給
インターフェイスボードを使用している時は、電力はそのボード上のMicro-B USBコネクタまたは5 VDC電源ソケトから供給できます。インターフェイスボード上の電子回路により、入力されたDC信号は必要とされる共振周波数の正弦波信号に変換されます。
ELL21K/Mのセットには 5 VDC電源が付属し、そのコネクタはインターフェイスボードの電源ソケットに接続できます。このソケットを介して電力を供給すると、Micro-B USBコネクタはUSBケーブルでのPCとの接続用に使用できるため、マウントをリモート制御することができます。PCからUSB 2.0接続で供給される電力は、マウントを駆動するのに十分ではありません(当該事項の詳細はマニュアルを参照)。PC制御を必要としない場合は、携帯型のUSB 5 Vバッテリーパックをインターフェイスボード上のMicro-B USBコネクタに接続して、マウントに電力を供給することもできます。
インターフェイスボードを使用しない場合には、回転マウントのボード上のPicoflex®コネクタのピンを介して電力を供給することができます。このコネクタのピン配列は「ピン配列」タブに記載されています。回転マウントへの電力供給やアドレス指定に関する詳細は、それぞれマニュアルや通信プロトコルマニュアルをご参照ください。
Click to Enlarge
Figure 4.6 インターフェイスボード

Click to Enlarge
Figure 4.7 インターフェイスボードの外形図
モータの動作
回転マウントの動作は、ピエゾ素子を特定の超音波周波数で振動させることにより制御します。個々のマウントには、マウントを前方に押し出す固有の共振周波数とマウントを反対方向に引っ張る別の共振周波数があります。モータを一方の共振周波数で駆動すると、モータの先端は小さな楕円形の経路に沿って時計回りに連続的に動きます。モータをもう一方の共振周波数で駆動すると、先端は同じ経路を反時計回りに動きます。どちらの共振周波数も100 kHz付近です。モータ先端の総変位量は、駆動する機械的負荷とピエゾ素子に供給される電圧に依存します。負荷を付けずに最大電圧5 Vの共振周波数で駆動すると、モータの先端は数μm以下の伸縮動作を行って楕円を描きます。「Elliptec®モータ」タブでは、モータについての詳細情報や動作原理を説明する動画をご覧いただけます。
回転マウントの位置決め
この回転マウントは連続動作用としては設計されておりませんのでご注意ください。一般的な用途では、デューティ比40%以下で動作させることをお勧めします。また、デューティ比60%以上での動作は数秒以下に制限してください。
マウントの動作はElliptec®ソフトウェアパッケージ(ダウンロード可能)を介したPC制御、またはマウントボードのデジタル信号線に単純な信号を送信することで制御できます。ソフトウェアと付属文書のダウンロードリンクは「ソフトウェア」タブにございます。
複数のElliptecデバイスの制御は、バス分配器ELLBを使用するか、1本のリボンケーブルに複数のコネクタを接続することで可能になります。1個のバス分配器に最大4台までのElliptecデバイスを接続できます。さらに分配器をデイジーチェーン接続することで、最大16台までのデバイスを接続することができます。このバスは、Elliptecソフトウェアが動作しているPCとのインターフェイスボード(下記のセットに付属)を介した接続、Arduino®またはRaspberry Pi®ボードとの接続、お手持ちの制御ボードとのコネクターピンを介した接続の3つ方法のうちのいずれかを用いることで制御できます。なお、インターフェイスボードをご使用の場合、ボード上のボタンは無効になります。そのほか、1本のリボンケーブルに最大16台のデバイスを接続することもできます。各デバイスはインターフェイスボードで同時に制御することもできますし、Elliptecソフトウェアでデバイスを選択して制御することもできます。複数のデバイスをリボンケーブルに接続する方法についてはマニュアルを、カスタム接続するときのピンの割り当てについては「ピン配列」タブをご覧ください。ソフトウェアで各デバイスを個別にアドレス指定する方法については、通信プロトコルマニュアルをご参照ください。ソフトウェアと付属文書のダウンロードリンクは「ソフトウェア」タブにございます。
マウントが前方あるいは後方へ移動するステップサイズのデフォルト値は10°です。この値は、Elliptecソフトウェアを使用するか、または通信プロトコルマニュアルで規定されている適切なASCIIメッセージを送信することで変更できます。マウントは前後にジョグ動作をするほかに、Elliptecソフトウェアを用いて絶対位置あるいは相対位置へ移動することも可能です。また前述のとおり、ソフトウェアを用いれば、ジョグ動作のステップサイズの設定、マウント位置の読み取り、さらにホーム位置の調整を行うことも可能です。
0.0055°(96 µrad)の角度分解能を有する磁気センサから読み取った情報は、マウントの位置決めやホームコマンドを実行する際に使用されます。マウントの移動範囲に制限はありませんが、マウントの回転位置は常に0°~359.99°の値で表示されます。マウントの最小移動量は0.0055°(96 µrad)で、磁気センサからの信号を用いた位置決めの再現性は0.05°(0.87 mrad)です。
共振周波数
工場出荷時の初期設定では、回転マウントの駆動用モータの電源投入時に、最良の性能が得られる共振周波数の検出作業を行うように設定されています。そのプロセスで回転マウントは前後にわずかに移動します。起動時のこの動作が望ましくない場合には、シリアルポートを使用して電源投入時の周波数を初期化することで、この校正プロセスを無効にすることができます。最適な共振周波数の検出はいつでも実施可能ですが、適切な性能を維持するために、荷重や周囲温度の変化したときには、新たにこの検出作業を実施することをお勧めします。詳細はマニュアルをご参照ください。
Click to Enlarge
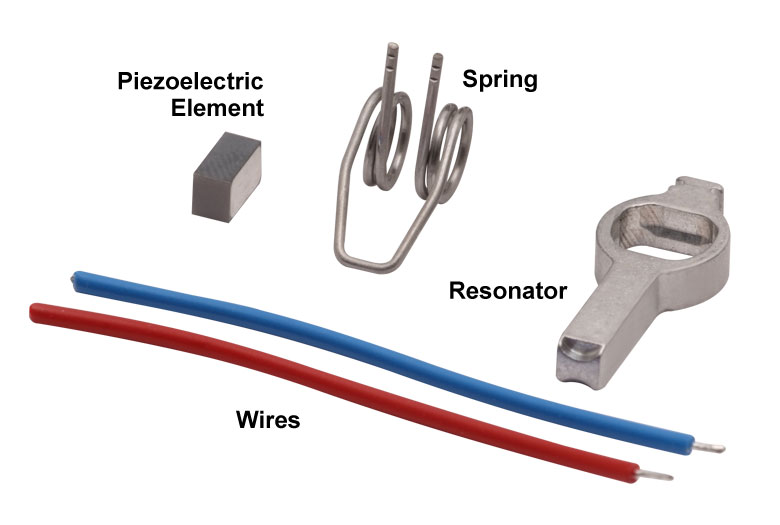
Figure 81B Elliptecモータの部品
Click to Enlarge
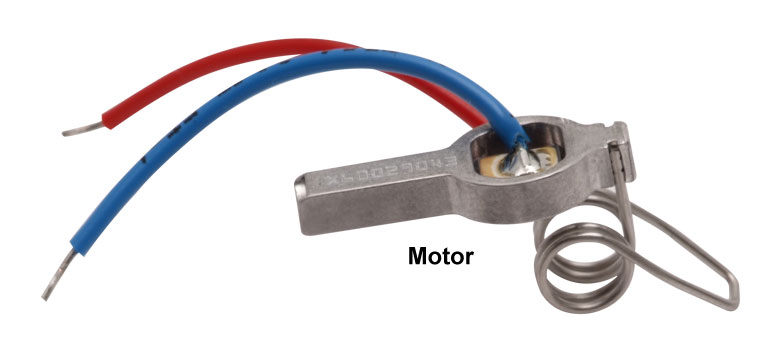
Figure 81A Elliptec共振ピエゾモータ
Elliptec® 共振ピエゾモータ
Figure 81Aに示した当社のElliptec®共振ピエゾモータの質量は1.2 gと軽量で、共振器筐体の寸法はバネを除いて8 mm×4 mm×20 mmとコンパクトです。
モータの部品
モータを構成する部品はFigure 81Bでご覧いただけます。ピエゾ素子はアルミニウム製の共振器内に圧入されています。共振器はその先端が必要とされる楕円形の動作をし、駆動されるモジュールと適切に接触するよう精密設計・精密加工がなされています。バネの自由端側は共振器筐体に組み込まれています。ピエゾ素子の上部ならびに底部にはんだ付けされているワイヤには、ピエゾ素子を超音波周波数で振動させるための電圧信号を供給します。
モータをシステム内に組み込むときは、バネの開ループ側を駆動される対象物に対して動かない頑丈な面に固定し、共振器の先端は対象物に接触させます。バネの目的は共振器の先端と駆動対象物との接触を一定に維持することです。また移動方向はピエゾ素子を駆動する2つの共振周波数によって決まります。
楕円形の動作と一般的なモータとの比較
このモータは、2つの共振周波数のうちのいずれかで駆動することにより動作します。超音波周波数で振動する電圧信号がピエゾ素子に印加されると、ピエゾ素子はその電圧信号の周波数に合わせて1 µm以下のレベルで伸長し、また元の寸法にまで収縮します。ピエゾ素子の寸法がこのように高速のサイクルで変化すると、アルミニウム製の共振器に振動が発生します。この振動が筐体の共振周波数のうちの一方の周波数で生じているときに、モータの先端に押す動作が発生します。もう一方の共振周波数で振動するときは、引っ張る動作が発生します。
Video 81Cに示されているように、モータが共振状態で動作している時にはその先端が楕円形の軌跡を描き、それによってこの引っ張る動作と押す動作が発生します。また、楕円の回る方向は選択された共振周波数によって決まります。モータの先端は楕円の半分を描くときは伸び、残りの半分を描くときは縮みます。モータが対象物を押すときは、先端が伸びるときに先端と対象物が接触し、縮むときには接触しません。モータが対象物を引っ張るときは、逆の動作をします。モータ先端の総変位量は、駆動する機械的負荷とピエゾ素子に供給される電圧の両方に依存します。駆動電圧のピーク値が5 Vのとき、最大変位量は数µmまで大きくなる可能性があります。
このモータはDCモータあるいは電磁ステッピングモータと同じように動作しますが、従来のモータの様々な欠点がありません。従来の電磁モータを停止させるには慣性に伴う遅延を克服する必要がありますが、非常に動的特性に優れたElliptecモータでは数マイクロ秒で停止できます。ギアがないため、バックラッシュも発生しません。磁石も無いため、電磁障害に敏感な用途にも使用できます。駆動される対象物の動きは連続的でスムーズです。駆動対象物を動かすにはモータの先端をそれと接触させる必要があるため、モータには摩擦ブレーキという安全機能が備わっています。プラスチック面に接している場合は、モータは静かに動作します。
製品組み込み(OEM)用途のためには、低コストに抑えるためモータを大量生産し、低価格のアナログ電子回路で駆動することもできます。マイクロプロセッサやソフトウェアは必要ありませんが、対応は可能です。
Click to Enlarge
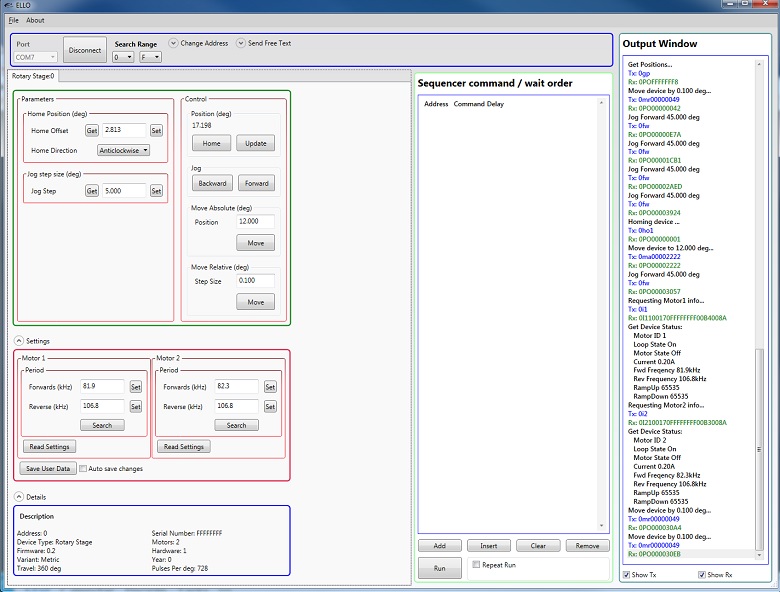
Elliptec共振ピエゾモーター用コントロールソフトウェアのGUI
Elliptec®共振ピエゾモータで駆動されるデバイス用のソフトウェア
Elliptec®共振ピエゾモータをベースとする全てのデバイスは、直感的なGUIを用いたElliptecシステムソフトウェアで制御することができます。ダウンロード可能なソフトウェア一式にはC#フォーマットのソースコードが含まれており、カスタム仕様のアプリケーションをあらゆる言語で作成することができます。右はGUIのスクリーンショットです。また下のボタンをクリックするとダウンロードのページがご覧いただけます。
コマンドはGUI画面の中央右寄りにあるSequencer command / wait orderに入力します。デバイスに送信するコマンドとして、例えば「Aho0」はアドレス「A」の回転ステージを時計回りにホーム位置に動かすコマンドで、「Afw」はアドレス「A」のマウントをジョグ動作で前方に動かすコマンドです。 コマンド「As1」は、アドレス「A」のモータ1に対して、 現在の動作条件に適した共振周波数の検出作業を実施させます。
ソフトウェア
バージョン1.6.5 (2025年5月6日)
操作しやすいGUIを備えたElliptecシステムソフトウェアが含まれています。通信プロトコルマニュアルもダウンロードできますが、これにはElliptecソフトウェアパッケージの通信コマンドの詳細が記載されています。
| Posted Comments: | |
| No Comments Posted |
回転マウント&回転ステージのセレクションガイド
当社では手動式および電動式の回転マウントと回転ステージを豊富にご用意しております。回転マウントの内孔はØ12 mm~Ø12.7 mm(Ø1/2インチ)、Ø25 mm~Ø25.4 mm(Ø1インチ)、またはØ50 mm~Ø50.8 mm(Ø2インチ) の光学素子取付け用に設計されております*。また回転ステージには、様々な部品やシステムが取り付けられるようにタップ穴が配置されております。電動式は、DCサーボモータ、2相ステッピングモータ、あるいはElliptec™共振ピエゾモータにより駆動されます。いずれも360°の連続回転が可能です。
*下表のマウントは、Ø12.7 mm、Ø25.4 mm、Ø50.8 mmの光学素子に対して最適設計されています。Ø12.0 mm、Ø25.0 mm、Ø50.0 mmなどの少し小さい光学素子に対してもご使用いただけますが、光学素子の偏心が重要ではない用途でのご使用をお勧めします。
手動回転マウント
| Rotation Mounts for Ø1/2" Optics | |||||||
|---|---|---|---|---|---|---|---|
| Item # | MRM05(/M) | RSP05(/M) | CRM05 | PRM05(/M)a | SRM05 | KS05RS | CT104 |
| Click Photo to Enlarge |  |  |  |  |  |  |  |
| Features | Mini Series | Standard | External SM1 (1.035"-40) Threads | Micrometer | 16 mm Cage-Compatible | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Compatible with 30 mm Cage Translation Stages and 1/4" Translation Stagesb |
| Additional Details | |||||||
| Rotation Mounts for Ø1" Optics | ||||||||
|---|---|---|---|---|---|---|---|---|
| Item # | RSP1(/M) | LRM1 | RSP1D(/M) | DLM1(/M) | CLR1(/M) | RSP1X15(/M) | RSP1X225(/M) | PRM1(/M)a |
| Click Photo to Enlarge |  |  |  |  |  |  | |  |
| Features | Standard | External SM1 (1.035"-40) Threads | Adjustable Zero | Two Independently Rotating Carriages | Rotates Optic Within Fixed Lens Tube System | Continuous 360° Rotation or 15° Increments | Continuous 360° Rotation or 22.5° Increments | Micrometer |
| Additional Details | ||||||||
| Rotation Mounts for Ø1" Optics | ||||||
|---|---|---|---|---|---|---|
| Item # | LM1-A & LM1-B(/M) | CRM1T(/M) | CRM1LT(/M) | CRM1PT(/M) | KS1RS | K6XS |
| Click Photo to Enlarge |   |  |  |  |  |  |
| Features | Optic Carriage Rotates Within Mounting Ring | 30 mm Cage-Compatiblea | 30 mm Cage-Compatible for Thick Opticsa | 30 mm Cage-Compatible with Micrometera | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Six-Axis Kinematic Mounta |
| Additional Details | ||||||
| Rotation Mounts for Ø2" Optics | |||||||
|---|---|---|---|---|---|---|---|
| Item # | RSP2(/M) | RSP2D(/M) | PRM2(/M) | LM2-A & LM2-B(/M) | LCRM2A(/M) | KS2RS | K6X2 |
| Click Photo to Enlarge |  |  |  |   |  |  |  |
| Features | Standard | Adjustable Zero | Micrometer | Optic Carriage Rotates Within Mounting Ring | 60 mm Cage-Compatible | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Six-Axis Kinematic Mount |
| Additional Details | |||||||
| Rotation Drive Mechanism and Adjustment Range | Manual, 360° Continuous | Coarse: Manual, 360° Continuous; Fine: ±7° Micrometer | Manual, 360° Continuous | ||||
| Optic Mounting | Internally SM2-Threaded Carriage | Internal SM2 Threads in LM2-A | Internally SM2-Threaded Carriage | ||||
| Maximum Accepted Optic Thickness | 0.51" (13 mm) | 0.54" (13.7 mm) | 0.48" (12.2 mm) | 0.46" (11.7 mm) | 0.52" (13.2 mm) | 0.47" (12 mm) | 0.53" (13.4 mm) |
| Post Mounting | 8-32 (M4) Tap | 8-32 (M4) Tap in LM2-B | 8-32 (M4) Tap | Four Counterbores for 8-32 (M4) Cap Screws | Six Counterbores for 8-32 (M4) Cap Screws | ||
| Cage System Compatibility | N/A | Four 4-40 (M3) Taps on Rotation Dial with 60 mm Spacing | N/A | Four Bores for Ø6 mm Cage Rods with 60 mm Spacing | N/A | N/A | |
手動回転ステージ
| Manual Rotation Stages | ||||||
|---|---|---|---|---|---|---|
| Item # | RP005(/M) | PR005(/M) | MSRP01(/M) | RP01(/M) | RP03(/M) | QRP02(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Features | Standard | Two Hard Stops | ||||
| Additional Details | ||||||
| Manual Rotation Stages | ||||||
|---|---|---|---|---|---|---|
| Item # | XRNR1(/M) | XRR1(/M) | PR01(/M) | CR1(/M) | XYR1(/M) | OCT-XYR1(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Features | Fine Rotation Adjuster and 2" Wide Dovetail Quick Connect | Fine Rotation Adjuster and 3" Wide Dovetail Quick Connect | Fine Rotation Adjuster and SM1-Threaded Central Aperture | Fine Pitch Worm Gear | Rotation and 1/2" Linear XY Translation | |
| Additional Details | ||||||
電動回転マウント&ステージ
| Motorized Rotation Mounts and Stages with Central Clear Apertures | |||||
|---|---|---|---|---|---|
| Item # | DDR25(/M) | PDR1C(/M) | PDR1(/M) | PDR1V(/M) | PDXR1(/M) |
| Click Photo to Enlarge |  |  |  |  |  |
| Features | Compatible with SM05 Lens Tubes, 16 mm Cage System, & 30 mm Cage System | Compatible with 16 mm Cage System | Compatible with SM05 Lens Tubes & 30 mm Cage System | Vacuum-Compatible; Also Compatible with SM05 Lens Tubes & 30 mm Cage System | Compatible with SM05 Lens Tubes & 30 mm Cage System |
| Additional Details | |||||
| Motorized Rotation Mounts and Stages with Central Clear Apertures | |||||||
|---|---|---|---|---|---|---|---|
| Item # | K10CR1(/M) | PRM1Z8(/M)a | DDR100(/M) | ELL16 | ELL14 | ELL21(/M) | HDR50(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |  |
| Features | Compatible with SM1 Lens Tubes & 30 mm Cage System | Compatible with SM1 Lens Tubes, 16 mm Cage System, 30 mm Cage System | Compatible with SM05 Lens Tubes, Open Frame Design for OEM Applications | Compatible with SM1 Lens Tubes, Open Frame Design for OEM Applications | Compatible with SM2 Lens Tubes, Open Frame Design for OEM Applications | Compatible with SM2 Lens Tubes | |
| Additional Details | |||||||
| Motorized Rotation Mounts and Stages with Tapped Platforms | ||
|---|---|---|
| Item # | PRMTZ8(/M)a | ELL18(/M)b |
| Click Photo to Enlarge |  |  |
| Features | Tapped Mounting Platform for Mounting Prisms or Other Optics | Tapped Mounting Platform, Open Frame Design for OEM Applications |
| Additional Details | ||

 ズーム
ズーム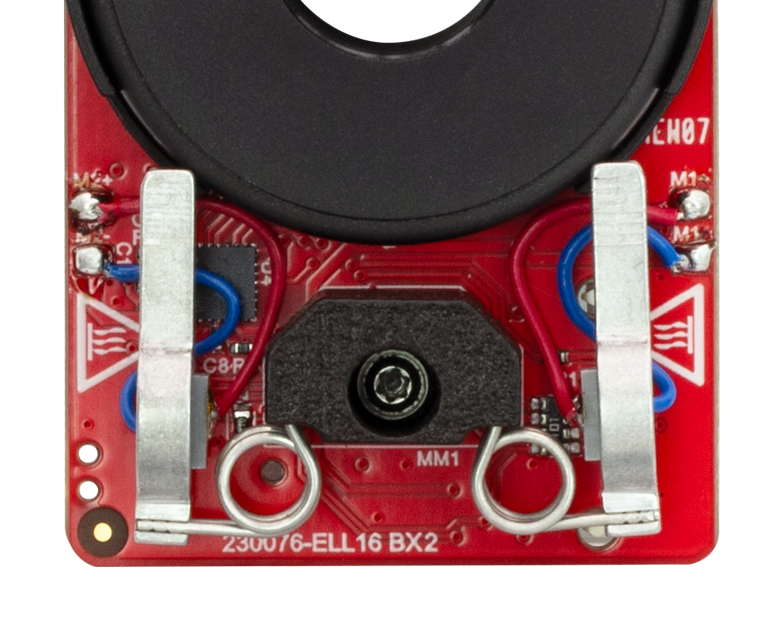
Click to Enlarge
Figure G1.1 モータのアルミニウム製先端は、回転マウントの周りを取り囲む黒いプラスチック製のトラックに接触しています。このトラックには、埃や油を付着させないために、触らないようにご注意ください。
- 製品組み込み(OEM)のための事前評価試験に適した製品
- セットアップへの組み込みが容易
- 手動やPC制御で操作
- マウントへの電力供給には付属の電源が必要
回転マウントセットは回転マウントELL21/Mを含む一式のパッケージです。パッケージELL21K/Mを使用することで、回転マウントを実験セットアップや様々なアプリケーションに容易に組み込むことができます。また、この技術を製品組み込み(OEM)用として利用するうえでの評価用としてもご活用いただけます。
2つのモータの先端は、Figure G1.1のように、回転マウントの周りを取り囲むプラスチック製トラックにしっかりと接触しています。モータは互いに反対の回転方向に向けて取り付けられており、一方のモータがトラックを押し、もう一方のモータが反対方向に引っ張ることで、時計回り(または反時計回り)に回転します。
| Included in the ELL21K(/M) Bundle | |
|---|---|
| ELL21(/M) Rotation Mount | 5 V Power Supply with Region-Specific Power Adapter |
| Interface Board | 8-Conductor 28 AWG Ribbon Cable |
| Micro-B USB Cable | PC-Based Software for Download |

 ズーム
ズームClick to Enlarge
Figure G2.1 回転マウントELL21(/M)の外形図
回転マウントELL21/Mは、Elliptec®共振モータを用いた複数の製品をネットワーク接続して使用するアプリケーション用に適しています。Ø50 mmまたはØ50.8 mm(Ø2インチ)光学素子を保持するためのSM2内ネジが付いています。取付け穴の間隔などの寸法や、マウントのそのほかの詳細仕様については「仕様」タブをご覧ください。回転マウントのカスタマイズについては当社までお問い合わせください。
回転マウントのPCB基板には、オス型の8ピンPicoflex®コネクタ(ヘッダ)が付いています。マウント ELL21/Mには基板のコネクタ(ヘッダ)に結合するメス型の8ピンPicoflex®コネクタ(レセプタクル)が付属します。

 ズーム
ズーム
- アダプタの取付けにはM3ザグリ穴を使用
- アダプタELLA6/Mの主な特徴
- ファイバーアライメントアクセサリ用の幅3 mmのキー溝
- 30 mmケージシステム用の#4-40取付け穴
- M6 x 1.0およびM3 x 0.5タップ穴
- アダプタELLA7/Mの主な特徴
- Ø25 mm~Ø25.4 mm(Ø1インチ)レンズチューブやマウント付き光学素子の取付けが可能なSM1ネジ
- 30 mmケージシステム用の#4-40取付け穴
- M6 x 1.0およびM3 x 0.5タップ穴
- アダプタELLA8には、Ø12 mm~Ø12.7 mmレンズチューブまたはマウント付き光学素子用のSM05ネジ付き取付け穴が5つあります。
こちらのアダプタープレートを用いることで、回転マウントELL21/Mの取付けオプションが広がります。アダプタは付属の4本のM3 x 0.5ネジを用いてステージ上部の可動部に取り付けます。ミリ規格とインチ規格のアダプタは、どちらの規格のステージにも取り付けられます。3種類のアダプタは全て回転ステージHDR50/Mに取り付けられますが、ELLA6/MとELLA7/Mはさらに回転ステージPRM1/MZ8にも取り付けられます。
アダプタELLA6/Mには様々な取付け穴が配列されており、小型ゴニオステージGN05/M、移動量6.4 mm(1/4インチ)のMSシリーズステージ、移動量12.7 mmのT12シリーズステージ、キューブおよびプリズム用のBSHシリーズマウントなど、多くのステージやマウントの取付けが可能です。
Click for Details
Figure G3.4 SM05ネジ付き5ポジションアダプタープレートELLA8


 ズーム
ズーム| Specifications | ||
|---|---|---|
| Item # | ELLC2 | |
| DC Voltage Input to Controller | 4.5 to 5.5 V | |
| Typical Current Consumption Per Module | Movement | 800 mA |
| Standby | 50 mA | |
| Operating Temperature Range | 15 to 40 °C | |
| Ribbon Cable Length (1 Included) | 250 mm (9.8") | |
| Dimensions (Interface Board Only) | 66.0 mm x 32.0 mm x 12.5 mm (2.60" x 1.26" x 0.49") | |
| Weight (Interface Board Only) | 10.8 g (0.022 lbs) | |
- 単品のELLシリーズ製品に追加して1組のキットを構成するための下記のコンポーネントのセット
- インターフェイスボード
- USB Micro Bケーブル
- Picoflex®1ケーブル
- 5 V電源、国内対応アダプタ
アップグレード用アクセサリーキットELLC2は、単品のELLシリーズのスライダ、ステージ、マウントをお持ちの場合に、それに追加して上記のようなELLセット一式2とするためのコンポーネントを揃えたキットです。接続されたELLステージの位置は、付属のハンドヘルドコントローラの3つのボタンで制御することができます。またUSBポートと付属のUSB Micro Bケーブルを介して、PCと直接接続することができます。キットには、ハンドヘルドコントローラとELLデバイスを接続するための0.25 mのPicoflex®ケーブル(8負荷回路)と、5 V電源(国内対応アダプタ付き)も含まれています。
- Picoflex®はMolex社の登録商標です。
- ELL17/M、ELL18/MおよびELL20/M用の取付けブラケットのご注文は当社までご連絡ください。
| Included in the ELLC2 Accessory Upgrade Kit | |
|---|---|
| USB 2.0 Micro-B Cable, 1.5 m Long | 5 V Power Supply with Region-Specific Power Adapter, 1.5 m Long |
| Interface Board | 8-Conductor 28 AWG Ribbon Cable, 250 mm Long |

 ズーム
ズーム| Specifications | ||
|---|---|---|
| Item # | ELLB | |
| Voltage Rating | 4.5 to 5.5 V | |
| Typical Current Consumption Per Module | Movement | 800 mA |
| Standby | 50 mA | |
| Maximum Board Current | 4.0 A | |
| Operating Temperature Range | 15 to 40 °C | |
| Ribbon Cable Length (4 Included) | 250 mm | |
| Maximum Supported Ribbon Cable Length | 500 mm | |
| Dimensions | 65.0 mm x 32.0 mm x 12.5 mm (2.56" x 1.26" x 0.49") | |
| Weight | 11 g (0.02 lbs) | |
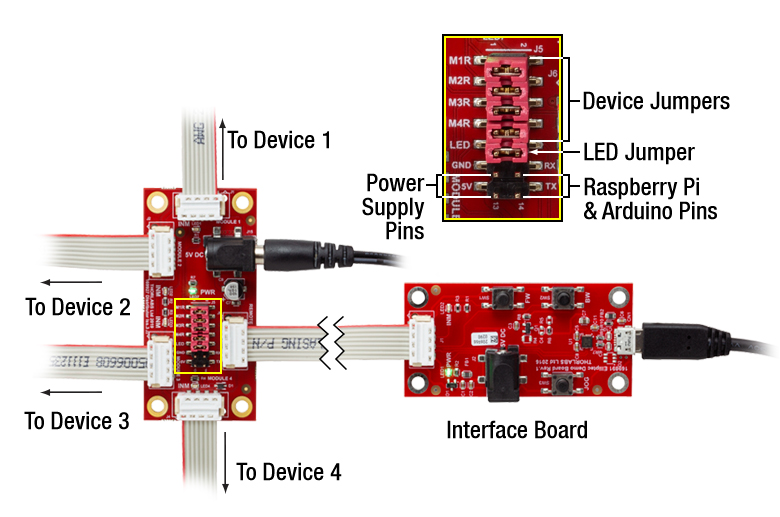
Click to Enlarge
Figure 683A 1個のバス分配器で最大4個のElliptecデバイスを制御できます。バスは上記のセットに付属しているインターフェイスボードでPCに接続可能です。このときバスはElliptecソフトウェアによって制御され、インターフェイスボード上のボタンは無効になっていますのでご注意ください。
- 1つのバスで最大4台までのElliptec®デバイスに対する制御と電源供給が可能
- 分配器をデイジーチェーン接続すると最大16台までのElliptecデバイスを制御可能
- Elliptecシステムソフトウェア(上記の「ソフトウェア」タブ参照)によるリモート制御
- Elliptec製品のセットに付属するUSBインターフェイスボードを使用してPCに接続可能
- ジャンパ5個およびリボンケーブル(8芯、AWG28)4本が付属
- Raspberry Pi®とArduino®ボードにも対応
バス分配器ELLBには、最大4台までのElliptec®デバイスを接続できます。 接続されたデバイスは上記のセットに付属するインターフェイスボードで制御可能ですが、それが無くても制御できます。インターフェイスボードを使用する場合は、接続された各デバイスはElliptecソフトウェアパッケージが動作するPCによってリモート制御されます。インターフェイスボードは、分配器のREMOTEと記載されているバス信号の入力ポートに接続します。この接続を行うと、インターフェイスボードのボタンは無効になります。インターフェイスボードを使用せずにカスタム接続する場合は、「ピン配列」タブをご覧ください。
複数のバス分配器ELLBをデイジーチェーン接続すると、最大16台までのElliptecデバイスに対する制御と電源供給が可能になります。単純に4つの出力ポート(MODULE)の内の1つを、次のボードの入力ポート(REMOTE)に接続するだけで動作します。LEDインジケータによりどのデバイスが動作しているかが示されます。ソフトウェアで各デバイスを個別にアドレス指定する方法については、通信プロトコルマニュアルをご参照ください。ソフトウェアと付属文書のダウンロードリンクは「ソフトウェア」タブにございます。
バス分配器には、最大電流4 Aの5 V電源を接続するためのØ6.3 mm電源コネクタが付いています。より多くのデバイスを接続して各ユニットを同時に制御するには、電源からより多くの電流を供給する必要があります。 各Elliptecデバイスによって消費される電流については、「仕様」タブをご覧ください。5V、2 Aの電源がELL9およびELL12に付属しています。接続されたElliptecデバイスの消費電流に応じて、電源は同時に2つのデバイスに対して電流の供給ができます。
機能を追加するための制御ピンが14個付いています(Figure 683A参照)。ピンの4組のペアがそれぞれジャンパで短絡されているとき、つまりジャンパがセットされているときは、Elliptecソフトウェアは接続されたElliptecデバイスからのフィードバック信号を受信することができます。 LEDと記載されているピンのペアはジャンパで短絡されていますが、これを取り外すとLEDインジケータは無効になります。 5VとGNDと記載されたピンを用いると、Ø6.3 mm電源コネクタに接続された電源の代わりに、お手持ちの5 V、2 A 電源を使用することができます。 RX とTX と記載されたピンを用いると、Elliptecインターフェイスボードの代わりに、Raspberry Pi®やArduino®ボードでバスを制御することができます。
ボードは四隅にあるØ3.5 mm貫通穴を使用して取り付けます。リボンケーブル(8芯、AWG28)は4本付属します。
| Compatible Elliptec Devices | |||||
|---|---|---|---|---|---|
 |  |  |  |  |  |
| Multi-Position Sliders | 28 mm Linear Stage | 60 mm Linear Stage | Rotation Stage | Rotation Mount | Motorized Iris |