 Products Home
Products Homeカメラの基礎知識

Ultra-Compact CMOS Cameras
with Low Read Noise
Passively Cooled, Compact
CMOS Sensor Cameras
with Low Read Noise
Actively Cooled, Monochrome sCMOS
Camera with Lowest Read Noise
Kiralux® 1.3 Megapixel Monochrome CMOS Camera in Thorlabs' Bergamo® II Multiphoton Microscope, with Drosophila VR Theater Stage

Please Wait
カメラ用語と種類のご紹介
こちらではサイエンティフィックカメラを選択する上で役立つ用語を説明しています。全部で4つのセクションに分かれています。「センサの特性」ならびに「光学系」では、サイエンティフィックカメラの仕様と使用される用語について説明しています。実験に適したカメラを選択するための仕様の見方、および当社のサイエンティフィックカメラのラインナップを使用した計算例がご覧いただけます。 「システムへの組込み」では、当社のサイエンティフィックカメラをほかの機器に組み込む際の詳細説明をしています。最後に「用途」では当社のサイエンティフィックカメラのサンプル画像と実施可能な研究について説明しています。


センサの特性

Click to Enlarge
Click for Raw Data
図1:当社の1.4メガピクセルモノクロカメラ(旧製品)の量子効率特性(典型値)。下表では当社のすべてのサイエンティフィックカメラの量子効率特性グラフがご覧いただけます。 1.4メガピクセルカメラでは、近赤外域強化(Boost)モードがソフトウェアから選択可能です。近赤外域での感度を最大にするためには赤外域ブロックフィルタを取り外す必要があります。Boostモードについては下記の近赤外域でのイメージングをご覧ください。
量子効率とスペクトル感度
CCDやCMOSなどのカメラセンサは入射光を電気信号に変換して処理を行います。この処理は完全ではありません。センサに到達するすべての光子の数だけ電子が生成されない場合があるからです。量子効率(QE)は、光子が電子を生成する平均変換比率で、パーセンテージで表されます。量子効率が高い撮像素子付きのカメラは、量子効率が低いカメラに比べて、信号を生成するための光子量は少なく済みます。
量子効率は撮像素子の材料(例:シリコン)の特性に依存します。シリコン(Si)の波長応答性は均一ではありません。そのため量子効率も波長によって異なります。量子効率のグラフが下図です。使用する用途の波長のカメラ感度がわかります。 なお、サイエンティフィックカメラで使用されるインターライン型CCDには、ピクセルアレイと空間的に合わせられたマイクロレンズアレイがあります。感光部(ピクセル)外に直進する光子もレンズによりピクセル上に向けられるため、センサのFill Factor(開口率)が最大限に得られます。図1ならびに下表内の量子効率のグラフではマイクロレンズアレイの効果も含まれています。
赤外域ブロックフィルタとARコーティング付きウィンドウ
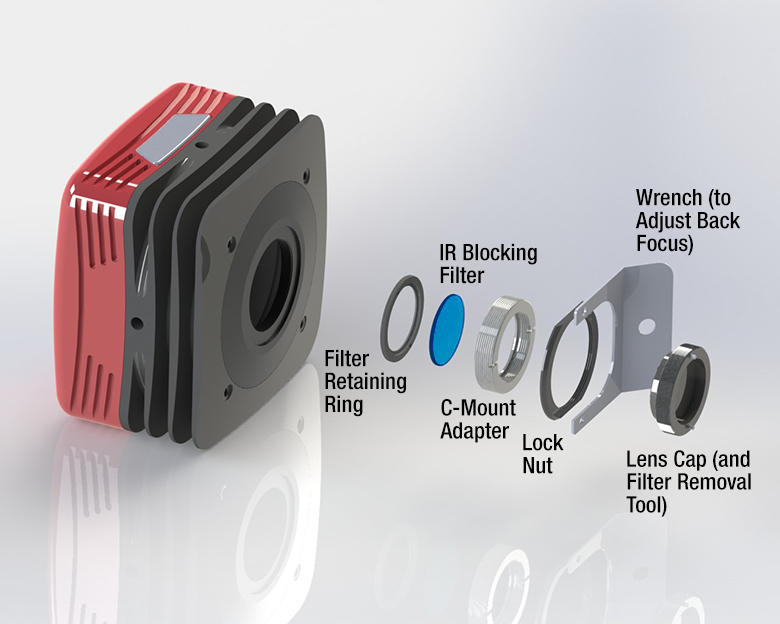
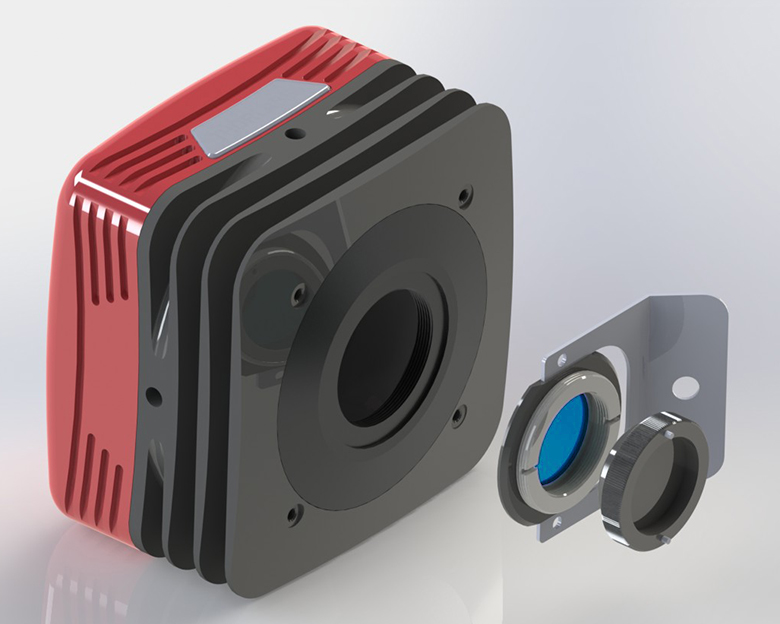
様々な技術を利用することで、波長域ごとに感度を抑制したり増強したりすることができます。シリコン(Si)ディテクタの感度は近赤外域に及びますが、多くの用途では、カメラの感度を人間の目の感度に近づけることが重要となってきます。そのため、通常シリコンディテクタの前には700 nm以上の光を除去する赤外域ブロックフィルタが取り付けられています。あるいは可視域での反射率が小さいARコーティング付きウィンドウが、カメラに取り付けられている場合もあります。当社のサイエンティフィックカメラでは、これらの光学素子(取り付けられている場合)を取外すことができるため、近赤外あるいはUVのスペクトル域でのイメージングも可能です。あるいは特定の用途要件にあった別のフィルタに交換することもできます。 当社のカメラに付属する取り外し可能な光学素子の詳細については下の表をご覧ください。サイエンティフィックCCDカメラからフィルタを取り外す方法については、図2から図4をご覧ください。 CMOSカメラから光学素子を取り外す方法についての詳細はマニュアルをご覧ください。
Click to Enlarge
図2:当社のサイエンティフィックカメラの光学ならびに機械部品
Click to Enlarge
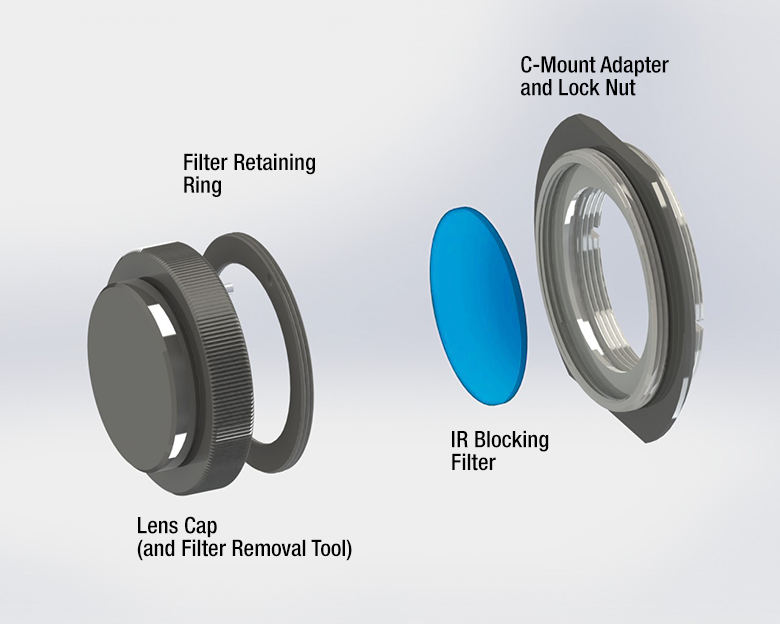
図4:フィルタの筐体はCマウントアダプタのネジと止めナットをレンチで完全に緩めることにより取り外せます。
Click to Enlarge
図3:レンズキャップは、赤外域ブロックフィルタを固定している固定リングを緩めるツールとしてお使いいただけます。このフィルタは、外径Ø25 mm~Ø25.4 mm(Ø1インチ)、厚さ4 mm以下のフィルタや光学素子と交換できます。取り外し方法はカメラのユーザーマニュアルのChapter 4に記載されています。
近赤外域でのイメージング
当社の1.4メガピクセルモノクロCCDカメラ(旧製品)のソフトウェアは、近赤外域強化(Boost)モードが選択可能です。CCDやCMOSカメラは、シリコン(Si)材料の感度により、一般的には比較的長い波長での変換効率が落ちますが、Boostモードで動作するカメラは900~1000 nmまで感度が上がり、多くの用途に役立つ画像が取得できます。用途としては、例えば赤外照明が弱い環境での近赤外ビームのプロファイリングがあります。さらには1.4メガピクセルセンサは低ノイズのため、十分な信号対雑音比(SNR)を保ちつつ長時間の露光が可能となります(SNRの詳細については下記をご覧ください)。また当社では近赤外強化型CMOSセンサを搭載し、抵光量のイメージングに適した低い読み出しノイズ( < 7.0 e- RMS)の1.3メガピクセルカメラCS135MUNもご用意しております。
量子効率の概要
| Camera Family | Sensor Type | Peak Quantum Efficiency | Quantum Efficiency Plots | Removable Optic | |
|---|---|---|---|---|---|
| Compact Scientific Cameras | |||||
| Kiralux® 1.3 MP CMOS Cameras | Monochrome CMOS | 59% at 550 nm | Window, Ravg < 0.5% per Surface (400 - 700 nm) | ||
| Color CMOS | See Quantum Efficiency Plot |  | IR Blocking Filter (Click Here for Graph) | ||
| NIR-Enhanced CMOS | 60% at 600 nm | Window, Ravg < 0.5% per Surface (650 - 1050 nm) | |||
| Zelux® 1.6 MP CMOS Cameras | Monochrome CMOS | 69% at 575 nm | Window, Ravg < 0.5% per Surface (400 - 700 nm) | ||
| Color CMOS | 65% at 535 nm |  | IR Blocking Filter (Click Here for Graph) | ||
| Quantalux® 2.1 MP sCMOS Cameras | Monochrome sCMOS | 61% at 600 nm | Window, Ravg < 0.5% per Surface (400 - 700 nm) | ||
| Kiralux 2.3 MP CMOS Cameras | Monochrome CMOS | 78% at 500 nm | Window, Ravg < 0.5% per Surface (400 - 700 nm) | ||
| Color CMOS | See Quantum Efficiency Plot |  | IR Blocking Filter (Click Here for Graph) | ||
| Kiralux 5 MP CMOS Cameras | Monochrome CMOS | 72% (525 - 580 nm) | Window, Ravg < 0.5% per Surface (400 - 700 nm) | ||
| Color CMOS | See Quantum Efficiency Plot |  | IR Blocking Filter (Click Here for Graph) | ||
| Kiralux 5 MP CMOS Polarization Camera | Monochrome CMOS with Wire Grid Polarizer Arraya | 72% (525 - 580 nm) | Window, Ravg < 0.5% per Surface (400 - 700 nm) | ||
| Kiralux 8.9 MP CMOS Cameras | Monochrome CMOS | 72% (525 - 580 nm) | Window, Ravg < 0.5% per Surface (400 - 700 nm) | ||
| Color CMOS | See Quantum Efficiency Plot |  | IR Blocking Filter (Click Here for Graph) | ||
| Kiralux 12.3 MP CMOS Cameras | Monochrome CMOS | 72% (525 - 580 nm) | Window, Ravg < 0.5% per Surface (400 - 700 nm) | ||
| Color CMOS | See Quantum Efficiency Plot |  | IR Blocking Filter (Click Here for Graph) | ||
詳細情報
カメラノイズ、信号対雑音比(SNR)、センサの温度、計算例については当社のチュートリアルをご覧ください。

カメラのノイズとセンサの温度
カメラを選択するうえで大切なのは用途と光量です。高照度の用途には、まず、高い量子効率を持つカメラを選びます。その後、センサーフォーマットやフレームレート、インターフェイスなどその他の要素について検討します。低照度の用途では、量子効率とともに下記にて説明する読み取りノイズや暗電流についても考慮する必要があります。
ノイズの原因
同じ照明の下で同じ物体の画像を複数回取得した場合でも、各ピクセルが記録した信号にはバラツキがでます。カメラ画像のノイズとは、照明が安定して均一であると仮定すると、測定信号の空間的・時間的バラツキの積み重ねであると言えます。ノイズには複数の要因があります。
- ダークショットノイズ(σD): 暗電流とは、カメラに全く光子が入射しない状況でも流れている電流です。熱によって引き起こされる現象で、シリコン(Si)製のチップから自然発生的に起こる電子(価電子は熱によって伝導バンドに励起されます)によるものです。露光中に取得される暗電子の量のバラツキがダークショットノイズです。信号レベルには依存しませんが、センサの温度に依存します。暗電流は、温度の低下に伴って減少するので、ダークショットノイズはカメラの冷却で低減できます。
- 読取りノイズ(σR): このノイズは電気信号を生成する際に発生します。主な原因は読み取りアンプでの電子の測定誤差です。センサの設計が引き起こすノイズですが、カメラの電子部品の設計の影響も受けます。このノイズは、信号レベルやセンサ温度には影響を受けず、CCDピクセルクロックレートが高速になると大きくなります。
- フォトンショットノイズ(σS): フォトンショットノイズは、光子がピクセルに達する際に起こる統計的ノイズです。フォトンの測定はポアソン統計に従うため、フォトンショットノイズは、測定される信号レベルに依存します。なお、センサ温度には依存しません。フォトンショットノイズがダークショットノイズと比較してかなり大きい場合、カメラの冷却がもたらすノイズ低減効果はほとんどありません。
- 固定パターンノイズ (σF): このノイズは、ピクセルの空間的な不均一性が原因で、信号レベルやセンサ温度には無関係です。なお、固定パターンノイズは、下記の説明で考慮されておりません。当社のサイエンティフィックCCDカメラにはあまり関係のないノイズですが、サイエンス用ではないセンサを検討する上では考慮が必要な場合があります。
画質(信号対雑音比で表される)は下記の比です。
- 下記の積で算出される信号電子数:
- photon flux(フォトン/秒)で表される光量レベル
- 露光時間(秒)
- 量子効率(QE)
- 下記の和で算出されるノイズ電子数:
- フォトンショットノイズ
- 読み取りノイズ
- ダークショットノイズ
光子から派生した信号電子は、画像形成、読み出し、デジタル化時に発生したノイズ電子と区別がつきません。信号対雑音比は、特定の条件下において、システム内で信号電子がどの程度ノイズ電子を上回るかを評価する性能指数です。信号対雑音比が高ければ高いほど見た目に画質が向上するため、画像を定量的に比較する手段となります。信号対雑音比の計算方法や詳細については「カメラノイズのチュートリアル」をご覧ください。
| Exposure | Camera Recommendation |
|---|---|
| <1 s | Standard Non-Cooled Camera Generally Sufficient |
| 1 s to 5 s | Cooled Camera Could Be Helpful |
| 5 s to 10 s | Cooled Camera Recommended |
| >10 s | Cooled Camera Usually Required |
高照度イメージング
高照度条件ではショットノイズを考慮します。それはつまりフォトンショットノイズが主なノイズ源であり、暗電流はごく僅かであることを意味します。そのため、信号対雑音比(SNR)はチュートリアルにあるように信号の平方根に比例し、露出時間を長くしても画質に大きな影響を及ぼしません。この場合、量子効率が十分に高いセンサであればどれでもご使用可能です。選択する際には撮像素子サイズ、パッケージサイズ、費用、インターフェイス、シャッタ、トリガ、アクセサリやソフトウェアなどが重要になってきます。ダークショットノイズが最小に抑えられるよう露出時間が設定されているため、通常TEC素子による冷却は必要ありません。
低照度イメージング
低照度条件では、読み取りノイズを考慮する必要があります。それはつまり光子から生成された電子がセンサ内の読み取りノイズよりも大きい必要があり、この条件下ではその他のセンサのノイズ源はごく僅かであることを意味します。この場合、信号対雑音比は露出時間に対してリニアな関係にあるため、露光時間を長くすることにより、取得した低照度イメージングの画像は向上します。しかし、すべての用途において、長い露光時間が可能になるわけではありません。例えば視野内での急激な強度変化や移動がある場合などです。低照度イメージングには、低い読み取りノイズ、高い量子効率、低い暗電流の撮像素子が適しています。これらの理由から、低照度の用途には当社のサイエンティフィックCCDまたはsCMOSカメラが適していることになります。TEC素子による冷却は、露出時間が約3~5秒あるときに有効です。
その他の考慮すべき点
ノイズの総量に対してダークショットノイズが大きく影響を与えない場合でも露出時間が長いときには、TEC素子による冷却を検討する必要があります。これはホットピクセルの影響を低減する一助となるからです。ホットピクセルは、露出時間が長いときに、「星」のようなパターンを引き起こす原因となります。光量ゼロ、高利得、そして長い露出時間で取得したサンプル画像が「チュートリアル」でご覧いただけます。
Click to Enlarge
図5: インターライン型CCDの電荷転送と読み出しのプロセスを示した図。
動画ではインターライン型CCDのピクセル上で電荷が蓄積し、そして電荷が転送、読み出され、次の露光が始まる様子がご覧いただけます。
CCDカメラの読み出し
当社のサイエンティフィックCCDカメラはインターライン型のCCDセンサがベースになっております。このセンサの構造と読み出し方法は図5とその下の動画でご覧いただけます。インターライン型のCCDは水平ならびに垂直方向(H x V)のピクセルアレイ上で電荷量の2次元マトリクスを生成するデバイスです。各ピクセルは露光時間中に入射される光子数に比例した電荷を蓄積します。露光時間が終了すると、電荷が蓄積された列の各素子は光が遮断されている隣の素子に移動します。蓄積された電荷は列ごとに水平シフトレジスタに転送されます。電荷列が水平シフトレジスタに移動すると、電荷量が連続的にデバイスで読み取られ、アナログまたはデジタル表示を生成するために電圧に変換されます。この構造の利点は電荷が移動すると、感光部(ピクセル)ですぐ次の露光を始められることです。
当社のカメラ制御ならびに画像取得ソフトウェアThorCamは、読み出しパラメータ(クロックレート、タップ数、ビニング、関心領域(ROI))の組み合わせを自由に切り替え可能なため、用途に応じて最適な組み合わせを選択することができます。読み出しの種類については次のセクションで説明していきます。
読み出しクロックレート
図5では5 x 3グリッドの簡単なCCDピクセルアレイ図がご覧いただけます。水平読み出しレジスタは1 x 3グリッドになります。水平シフトレジスタの三角の先の「センスノード(Sense Node)」では電荷が電圧に変換され、A/D変換器を使用してデジタル変換されます。デバイスの物理的性質により、画像フレームがカメラによって読み出される(read out)速度(フレームレート)が制限されています。
当社のサイエンティフィックカメラは20または40 MHzの読み出し速度です。これはピクセルがシフトレジスタから記録される速度です。読み出し速度でカメラの最大フレームレートが決まります。読み出し速度が20 MHzから40 MHzに上がると、カメラのフレームレートは倍になりますが、その他のパラメータが同じであることを仮定した場合、読み取りノイズは若干高くなります。40 MHzの読み出し速度では読み取りノイズが若干高くなりますが、視野に十分光量がある場合、イメージングは読み取りノイズよりもショットノイズの制限を受けます。ショットノイズの制限を受けている場合、40 MHzの読み出しモードではその他の性能を犠牲にすることなく速度が速まります。
マルチタップ動作
フレームレートを上げる方法の1つにCCDをセクション(「タップ」またはチャンネル)に分ける方法があります。 これらのタップはそれぞれ同時期に読み出すことができるため、ピクセルを読み出す合計時間が短くなり、全体のフレームレートを上げることができるのです。当社のカメラで使用されているチップの多くは1タップ(動画参照)、2タップ(図6参照)、そして4タップ(図7参照)で動作可能です。
1タップの読み出し
図5と右の動画ではCCD下部の水平読み出しレジスタを示しています。水平レジスタから電荷が水平方向に移動し、センスノードでAD変換器によって電荷が電圧に変換されるまでの速度には制限があり、それがカメラのフレームレートの制限になります。
標準的な(1タップ)読み出しモードにおいて、電荷列が水平レジスタに転送され、センスノードに送られる速度は、20または40 MHzの読み出しクロックレートによって決まります。
2タップの読み出し
図6で示しているセンサ(と水平シフトレジスタ)は2つに分かれ、センスノードもシフトレジスタの両側に1つずつあります。読み出し時に電荷列は水平レジスタに転送されます(標準の1タップ動作と同じです)。しかし、各ピクセル列の半分は左側に、残りの半分は右側のセンスノードとAD変換器に送られます。これにより電荷の読み取り時間は1タップモードの時と比べて半分で済みます。半分にされた画像はデジタル処理で1つの画像に再構築されるため、通常通りの画像をご覧いただけます。電荷が2つの異なるセンスノードとAD変換器を通るので、画像コンテンツ、カメラの露光時間、利得、そして黒レベルの設定によっては2つの画像が若干合致しない場合があります。このズレが最小に抑えられるよう幅広い動作範囲で様々な対処がされていますが、画像の中央に垂直な「シーム」が見られる場合があります。
4タップの読み出し
図7ではセンサが4つに分かれ、水平レジスタは2つ、チップの上とチップの下に1つずつあります。電荷は上半分が上、下半分が下方向に転送されます。読み出し時には各電荷列がそれぞれの水平レジスタ、センスノード、そしてAD変換器に転送されます。2タップの読み出しと同様に、各ピクセル列の半分がそれぞれのセンスノードとAD変換器に送られます。これにより電荷の読み出し時間は1タップモードの時と比べて1/4で済みます。4つに分かれた画像はデジタル処理で1つの画像に再構築されるため、通常通りの画像がご覧いただけます。電荷が4つの異なるセンスノードとAD変換器を通るので、画像が若干合致しない場合があります。このズレは画像コンテンツ、カメラの露光時間、利得、そして黒レベルの設定に依存します。このズレが最小に抑えられるよう幅広い動作範囲で様々な対処がされていますが、画像の中央に垂直ならびに水平方向に「シーム」が見られる場合があります。
下の表では各カメラ製品のタップ数をまとめています。各カメラの製品ページの仕様表には読み出し速度とタップ数の組み合わせごとの最大フレームレートが記載されています。 タップ数はThorCamソフトウェアで設定できます。
Click to Enlarge
図6:2タップカメラ
Click to Enlarge
図7:4タップカメラ
マルチタップ読み出し動作の概要
関心領域(ROI)
小領域の読み出し、関心領域(ROI)モードでは、カメラがユーザ設定された一部の列のみ読み出すので、高いフレームレートを得ることができます。ThorCamアプリケーションソフトウェアでは、ディスプレイ画面での任意の領域を長方形で描くことにより選択ができます。関心領域の上または下の不要な列は高速走査されますが読み出されません。ご所望の列のみが読みだされます。不要な縦列(関心領域の横側)はソフトウェアで削除されます。画像の空間分解能は同じですが、視野は小さくなります。
関心領域を変更することにより読み出す列数(縦列ではない)が変わるため、フレームレートに影響があるのは関心領域の垂直方向の寸法です。水平方向の寸法はフレームレートに影響を与えません。不要な列を高速走査する時間とご所望の関心領域を読み出す時間が加算されるため、フレームレートは関心領域のサイズの線形関数にはなりません。
ビニング
ビニングモードでは、ユーザ設定によりCCDの隣合う水平ならびに垂直ピクセル数が1つのピクセルとして読み出されます。ビニングが大きいと空間分解能が減少しますが、カメラの感度とフレームレート、そして画像の信号対雑音比は向上します。
特定の用途向けにビニングならびに関心領域モードを組み合わせて読み出し速度とフレームレートを最適化することができます。
光学系
イメージサイズと視野
下記では、顕微鏡用対物レンズを使用し構築したイメージングシステムの視野の計算方法について説明します。マシンビジョンのカメラレンズ使用時の視野については「カメラレンズチュートリアル」をご覧ください。
顕微鏡システムにおいて、カメラセンサのサイズが、所定の時間でイメージングできる試料の領域サイズに与える影響を知ることは重要です。これをイメージングシステムの視野と呼んでいます。センサ寸法(ミリ単位)をイメージングシステムの倍率で割ることにより求められます。例えば当社の旧製品の8 MPセンサーアレイは18.13 mm x 13.60 mmです。倍率が40倍の場合、試料面の視野は457 µm x 340 µmに相当します。
撮像素子を選択する際にはセンサのほかのパラメータとバランスをとる必要があります。一般的にセンサのサイズが大きくなると最大フレームレートは小さくなります。
Click for Details
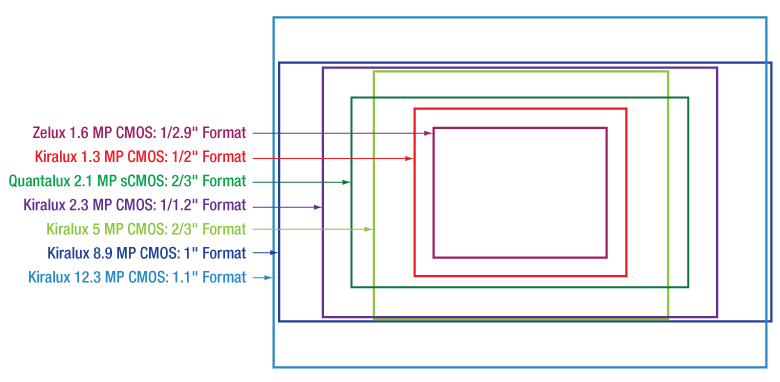
図1: 様々なフォーマットサイズ。なおサイズとアスペクト比は概寸で、センサによって異なる場合があります。
カメラのセンサーサイズは「フォーマット」で示されます。フォーマットは分数、インチで表され、概ねデジタルセンサーチップの対角線長に該当します。しかし、このサイズは完全に標準化されていないため、実際にはバラツキがあります。また同じフォーマットのアスペクト比についてもメーカによって異なる場合があります。図1で標準的な35 mmフィルムフレームに合わせた様々なフォーマットのセンサーサイズの概寸を示しています。
下の表では当社のサイエンティフィックカメラすべてのフォーマットとセンサーサイズをピクセルとミリ単位で記載しています。
撮像素子サイズの概要
| Camera Family | Format (Diagonal) | Resolution (pixels) | Pixel Size (µm) | Sensor Size (mm) |
|---|---|---|---|---|
| Zelux® 1.6 MP CMOS | 1/2.9" (6.2 mm) | 1440 x 1080 | 3.45 x 3.45 | 4.97 x 3.73 |
| Kiralux® 1.3 MP CMOS | 1/2" (7.76 mm) | 1280 x 1024 | 4.8 x 4.8 | 6.14 x 4.92 |
| Quantalux® 2.1 MP sCMOS | 2/3" (11 mm) | 1920 x 1080 | 5.04 x 5.04 | 9.68 x 5.44 |
| Kiralux 5 MP CMOS | 2/3" (11 mm) | 2448 x 2048 | 3.45 x 3.45 | 8.45 x 7.07 |
| Kiralux 5 MP Polarization CMOS | ||||
| Kiralux 2.3 MP CMOS | 1/1.2" (13.4 mm) | 1920 x 1200 | 5.86 x 5.86 | 11.25 x 7.03 |
| Kiralux 8.9 MP CMOS | 1" (16 mm) | 4096 x 2160 | 3.45 x 3.45 | 14.13 x 7.45 |
| Kiralux 12.3 MP CMOS | 1.1" (17.5 mm) | 4096 x 3000 | 3.45 x 3.45 | 14.13 x 10.35 |
分解能
ピクセル数(H x V)はカメラの分解能と誤解されることがあります。正確に言えば、分解能は光学分解能で、細かい特長まで解像できる能力のことです。下記は、顕微鏡用対物レンズを使用するイメージングシステムに焦点を合わせて説明しています。マシンビジョンのカメラレンズを使用したシステム構築については「カメラレンズチュートリアル」をご覧ください。
イメージングシステムの分解能の計算方法
イメージングシステムにおいて、物体をはっきり区別できる距離には限界があります。高品質顕微鏡など収差を制限するよう設計されたイメージングシステムの分解能を制限するものは回折のみです。焦点面での像は物体の各点それぞれからの回折パターンが重なった集まりと考えられます。2つの隣り合う点について、1つの点の回折パターンの最も明るい中心、すなわちエアリーディスクがもう1つの点の回折パターンの最初の(暗い)円環内にあるとき、2つの点が分解していると言えます。この条件はレイリの基準として知られており、下記のように表します。
R=1.22λ/(2NA),
Rは2つのエアリーディスク間の距離、λは光の波長、そしてNAは顕微鏡対物レンズの開口数です。例えばNA0.75の対物レンズの場合、分解能は(1.22*550 nm)/(2*0.75) = 0.45 µmです。
必要なカメラピクセルサイズを求める方法
顕微鏡の対物レンズにも倍率があります。この値は像面における試料の拡大率を示します。例えば倍率が2倍の場合、像は物体の2倍となります。よってNA0.75、倍率40倍の対物レンズを使用している場合、550 nmでの試料の分解限界は0.45 µmで、試料の長さ0.45 µmの部分は像面では40倍拡大されるため、像面での対象の長さは17.9 µmとなります。
CCDまたはCMOSカメラのレンズアレイに正確な像を描くには、ナイキスト基準を適用する必要があります。ナイキスト基準では、分解可能な最小サイズをCCDにより解像するには、このサイズの2倍の空間周波数でサンプリングする必要があること、つまり(最低でも)2ピクセル必要であることを述べています。これはNA0.75、倍率40倍の対物レンズの場合、ピクセルサイズを8.9 µmまたはそれ以下にして最低でも2ピクセルで最小に分解可能なサイズを表現する必要があるという意味です。これはシステムの分解能がカメラのピクセルサイズではなく、顕微鏡対物レンズによって制限されているという通常では好ましい条件です。
対物レンズ、特に倍率が低いものについては、対物レンズが分解できるサイズが小さいため、カメラでイメージングできない場合があります。例えば倍率が4倍、NA0.13の対物レンズの場合、550 nmで対物レンズが分解可能な最小サイズは2.58 µmで、5.2 µmのカメラピクセルが必要となります。もしピクセルサイズ5.5 µmのカメラを使用した場合、このイメージングシステムの分解能を制限しているのはカメラとなります。この場合、イメージングできるサイズは2.75 µmまでということになります。しかし、ピクセルサイズが3.45 µmのカメラを使用すれば、レンズによって制限される分解能である2.58 µmを得ることができます。
下の表では様々な対物レンズの550 nmにおける分解可能な最小サイズと、そのサイズをイメージング可能な当社のカメラがご覧いただけます。対物レンズのラインナップについては こちらをご覧ください。
| Compact Scientific Cameras Resolution | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Objectivea | Smallest Resolvable Feature Size @ λ=550 nm | Smallest Feature Projected on Image Plane | Nyquist- Limited Pixel Size | Kiralux 1.3 MP CMOS Cameras | Zelux 1.6 MP CMOS Cameras | Quantalux 2.1 MP sCMOS Cameras | Kiralux 2.3 MP CMOS Cameras | Kiralux 5 MP CMOS Cameras | Kiralux 8.9 MP CMOS Cameras | Kiralux 12.3 MP CMOS Cameras | ||
| NIR-Enhanced, Mono., or Color | Monochrome or Color | Monochrome | Monochrome or Color | Mono., Color, or Mono. Polarization | Monochrome or Color | Monochrome or Color | ||||||
| 1280 x 1024 | 1440 x 1080 | 1920 x 1080 | 1920 x 1200 | 2448 x 2048 | 4096 x 2160 | 4096 x 3000 | ||||||
| 4.8 µm Square Pixels | 3.45 µm Square Pixels | 5.04 µm Square Pixels | 5.86 µm Square Pixels | 3.45 µm Square Pixels | 3.45 µm Square Pixels | 3.45 µm Square Pixels | ||||||
| Item # | Mag. | NA | Sample FOV (H x V) (mm)b | Sample FOV (H x V) (mm)b | Sample FOV (H x V) (mm)b | Sample FOV (H x V) (mm)b | Sample FOV (H x V) (mm)b | Sample FOV (H x V) (mm)b | Sample FOV (H x V) (mm)b | |||
| TL1X-SAP | 1X | 0.03 | 11.18 µm | 11.18 µm | 5.59 µm | 6.14 x 4.92 | 4.97 x 3.73 | 9.68 x 5.44 | 11.25 x 7.03 | 8.45 x 7.07 | 14.13 x 7.45 | 14.13 x 10.35 |
| TL2X-SAP | 2X | 0.10 | 3.36 µm | 6.71 µm | 3.36 µm | 3.07 x 2.46 | 2.48 x 1.86 | 4.84 x 2.72 | 5.63 x 3.52 | 4.22 x 3.53 | 7.07 x 3.73 | 7.07 x 5.18 |
| RMS4X | 4X | 0.10 | 3.36 µm | 13.42 µm | 6.71 µm | 1.54 x 1.23 | 1.24 x 0.93 | 2.42 x 1.36 | 2.81 x 1.76 | 2.11 x 1.77 | 3.53 x 1.86 | 3.53 x 2.59 |
| RMS4X-PF N4X-PF | 4X | 0.13 | 2.58 µm | 10.32 µm | 5.16 µm | 1.54 x 1.23 | 1.24 x 0.93 | 2.42 x 1.36 | 2.81 x 1.76 | 2.11 x 1.77 | 3.53 x 1.86 | 3.53 x 2.59 |
| TL4X-SAP | 4X | 0.20 | 1.68 µm | 6.71 µm | 3.36 µm | 1.54 x 1.23 | 1.24 x 0.93 | 2.42 x 1.36 | 2.81 x 1.76 | 2.11 x 1.77 | 3.53 x 1.86 | 3.53 x 2.59 |
| MY5X-822 | 5X | 0.14 | 2.40 µm | 11.98 µm | 5.99 µm | 1.23 x 0.98 | 0.99 x 0.75 | 1.94 x 1.09 | 2.25 x 1.41 | 1.69 x 1.41 | 2.83 x 1.49 | 2.83 x 2.07 |
| MY7X-807 | 7.5X | 0.21 | 1.60 µm | 11.98 µm | 5.99 µm | 0.82 x 0.66 | 0.66 x 0.50 | 1.29 x 0.73 | 1.50 x 0.94 | 1.13 x 0.94 | 1.88 x 0.99 | 1.88 x 1.38 |
| RMS10X | 10X | 0.25 | 1.34 µm | 13.42 µm | 6.71 µm | 0.61 x 0.49 | 0.50 x 0.37 | 0.97 x 0.54 | 1.13 x 0.70 | 0.84 x 0.71 | 1.41 x 0.75 | 1.41 x 1.04 |
| MY10X-823 | 10X | 0.26 | 1.29 µm | 12.90 µm | 6.45 µm | 0.61 x 0.49 | 0.50 x 0.37 | 0.97 x 0.54 | 1.13 x 0.70 | 0.84 x 0.71 | 1.41 x 0.75 | 1.41 x 1.04 |
| MY10X-803 | 10X | 0.28 | 1.20 µm | 11.98 µm | 5.99 µm | 0.61 x 0.49 | 0.50 x 0.37 | 0.97 x 0.54 | 1.13 x 0.70 | 0.84 x 0.71 | 1.41 x 0.75 | 1.41 x 1.04 |
| RMS10X-PF N10X-PF | 10X | 0.30 | 1.12 µm | 11.18 µm | 5.59 µm | 0.61 x 0.49 | 0.50 x 0.37 | 0.97 x 0.54 | 1.13 x 0.70 | 0.84 x 0.71 | 1.41 x 0.75 | 1.41 x 1.04 |
| TL10X-2P | 10X | 0.50 | 0.67 µm | 6.71 µm | 3.36 µm | 0.61 x 0.49 | 0.50 x 0.37 | 0.97 x 0.54 | 1.13 x 0.70 | 0.84 x 0.71 | 1.41 x 0.75 | 1.41 x 1.04 |
| RMS20X MY20X-824 | 20X | 0.40 | 0.84 µm | 16.78 µm | 8.39 µm | 0.31 x 0.25 | 0.25 x 0.19 | 0.48 x 0.27 | 0.56 x 0.35 | 0.42 x 0.35 | 0.71 x 0.37 | 0.71 x 0.52 |
| MY20X-804 | 20X | 0.42 | 0.80 µm | 15.98 µm | 7.99 µm | 0.31 x 0.25 | 0.25 x 0.19 | 0.48 x 0.27 | 0.56 x 0.35 | 0.42 x 0.35 | 0.71 x 0.37 | 0.71 x 0.52 |
| RMS20X-PF N20X-PF | 20X | 0.50 | 0.67 µm | 13.42 µm | 6.71 µm | 0.31 x 0.25 | 0.25 x 0.19 | 0.48 x 0.27 | 0.56 x 0.35 | 0.42 x 0.35 | 0.71 x 0.37 | 0.71 x 0.52 |
| RMS40X | 40X | 0.65 | 0.52 µm | 20.65 µm | 10.32 µm | 0.15 x 0.12 | 0.12 x 0.09 | 0.24 x 0.14 | 0.28 x 0.18 | 0.21 x 0.18 | 0.35 x 0.19 | 0.35 x 0.26 |
| RMS40X-PF N40X-PF | 40X | 0.75 | 0.45 µm | 17.89 µm | 8.95 µm | 0.15 x 0.12 | 0.12 x 0.09 | 0.24 x 0.14 | 0.28 x 0.18 | 0.21 x 0.18 | 0.35 x 0.19 | 0.35 x 0.26 |
| RMS40X-PFO | 40X | 1.30 | 0.26 µm | 10.32 µm | 5.16 µm | 0.15 x 0.12 | 0.12 x 0.09 | 0.24 x 0.14 | 0.28 x 0.18 | 0.21 x 0.18 | 0.35 x 0.19 | 0.35 x 0.26 |
| MY50X-825 | 50X | 0.42 | 0.80 µm | 39.94 µm | 19.97 µm | 0.12 x 0.10 | 0.10 x 0.07 | 0.19 x 0.11 | 0.23 x 0.14 | 0.17 x 0.14 | 0.28 x 0.15 | 0.28 x 0.21 |
| MY50X-805 | 50X | 0.55 | 0.61 µm | 30.50 µm | 15.25 µm | 0.12 x 0.10 | 0.10 x 0.07 | 0.19 x 0.11 | 0.23 x 0.14 | 0.17 x 0.14 | 0.28 x 0.15 | 0.28 x 0.21 |
| N60X-PF | 60X | 0.85 | 0.39 µm | 23.68 µm | 11.84 µm | 0.10 x 0.08 | 0.08 x 0.06 | 0.16 x 0.09 | 0.19 x 0.12 | 0.14 x 0.12 | 0.24 x 0.12 | 0.24 x 0.17 |
| RMS60X-PFC | 60X | 0.90 | 0.37 µm | 22.37 µm | 11.18 µm | 0.10 x 0.08 | 0.08 x 0.06 | 0.16 x 0.09 | 0.19 x 0.12 | 0.14 x 0.12 | 0.24 x 0.12 | 0.24 x 0.17 |
| RMS60X-PFOD | 60X | 1.25 | 0.27 µm | 16.10 µm | 8.05 µm | 0.10 x 0.08 | 0.08 x 0.06 | 0.16 x 0.09 | 0.19 x 0.12 | 0.14 x 0.12 | 0.24 x 0.12 | 0.24 x 0.17 |
| MY100X-806 | 100X | 0.70 | 0.48 µm | 47.93 µm | 23.96 µm | 0.06 x 0.05 | 0.05 x 0.04 | 0.10 x 0.05 | 0.11 x 0.07 | 0.08 x 0.07 | 0.14 x 0.07 | 0.14 x 0.10 |
| RMS100X-O | 100X | 1.25 | 0.27 µm | 26.84 µm | 13.42 µm | 0.06 x 0.05 | 0.05 x 0.04 | 0.10 x 0.05 | 0.11 x 0.07 | 0.08 x 0.07 | 0.14 x 0.07 | 0.14 x 0.10 |
| RMS100X-PFO N100X-PFO | 100X | 1.30 | 0.26 µm | 25.81 µm | 12.90 µm | 0.06 x 0.05 | 0.05 x 0.04 | 0.10 x 0.05 | 0.11 x 0.07 | 0.08 x 0.07 | 0.14 x 0.07 | 0.14 x 0.10 |

Click to Enlarge
図2: 様々な対象物レンズの開口数による分解可能な最小サイズを波長毎に示しているグラフ(実線)です。例として、倍率が60倍の対物レンズ使用時の、当社のカメラの分解可能な最小サイズもグラフに示しています(点線)。詳細については本文をご覧ください。
分解能と波長
分解能は波長に比例するため、特定のイメージングシステムにおいてイメージング波長が分解能へ及ぼす影響を考慮することは重要です。図2は、様々な対物レンズの開口数毎の投影画像サイズの波長特性を示しています(実線)。また倍率60倍の対物レンズ使用時の、各カメラが分解可能な最小サイズもグラフに示しています(点線)。
図2を用いて、イメージングシステムの分解能について下記のような解析ができます。波長が短くなると、対物レンズがイメージング可能な最小サイズは小さくなります。しかしこれらの小さい対象の場合、カメラピクセルも小さくする必要があります。 点線より下の実線部分はカメラでイメージングできません(イメージングシステムでの制限要素はカメラとなります)。そして、点線より上の実線部分はカメラでイメージング可能で、イメージングシステムでの制限要素は対物レンズとなります。
その他の考慮すべき点
上記の検証では、イメージセンサのピクセルが小さい方が大きいセンサより好ましいことを示しました。しかし、ピクセルが小さいと光子の収集量も少ないため、量子効率も低くなります。収集される光子が少ないと、収集される信号も低くなり、信号対雑音比も悪くなります。そのため、ピクセルサイズの要件と実験のノイズの要件のバランスをとる必要があるのです。
| Manufacturer | Tube Lens Focal Length |
|---|---|
| Leica | f = 200 mm |
| Mitutoyo | f = 200 mm |
| Nikon | f = 200 mm |
| Thorlabs | f = 200 mm |
| Olympus | f = 180 mm |
| Zeiss | f = 165 mm |
チューブレンズの効果
最近の顕微鏡対物レンズは無限遠補正光学系が多く、そのためチューブレンズが必要です。対物レンズの倍率は、特定のチューブレンズの焦点距離を想定して計算されています。右の表のように各顕微鏡メーカはチューブレンズに様々な焦点距離を設定しています。そのため、異なるメーカの光学素子を組み合わせてカスタム構成する場合、システムの倍率を算出するには対物レンズの実効倍率を計算する必要があります。対物レンズの実効倍率(effective magnification)は下記で求められます。 .
.
ここでDesign Magnificationは対物レンズに印字されている倍率、fTube Lens in Microscopeは使用する顕微鏡内のチューブレンズの焦点距離、fDesign Tube Lens of ObjectiveはDesign Magnificationを算出するために対物レンズのメーカが使用したチューブレンズの焦点距離です。焦点距離は右表に記載されています。
Leica、Mitutoyo、Nikonならびに当社ではチューブレンズの焦点距離は同じです。これらのメーカの光学素子を組み合わせた場合、倍率の変換は必要ありません。当社では焦点距離が200 mmのチューブレンズをいくつかご用意しております。一般的なイメージング用途には480 nm以下の波長で色補正が最適化され、高い透過率を示すTTL200をお勧めします。
ビネット
ビネットはカメラの焦点面で形成された像がカメラのフォーマットより小さいときに起こります。ビネットが発生すると、センサの領域が不完全に露光されるため、暗い輪が画像の縁周りに現れます。ビネット効果は図11でご覧いただけます。どちらも同じ4/3インチフォーマットカメラを使用しています(旧製品の8051M-GE)。マシンビジョンのレンズをイメージングシステムに組み込む際の詳細については「 カメラレンズチュートリアル」をご覧ください。
顕微鏡でも同じ効果が現れます。対物レンズとチューブレンズが生成する像(通常円形)が長方形の撮像素子より小さいかどうかは、簡単な計算式で分かります。カメラの焦点面での像のサイズ(mm)を推定するには対物レンズの視野数(field number;FN)が使用可能です。対物レンズでは像面(つまりカメラセンサ)における視野径(mm)を表します。この寸法が撮像素子の対角線長よりも大きいとビネットが問題になる可能性は低くなります。なお、この計算には対物レンズ設計の影響は含まれておりません。例えば、図3aのように収差または若干のビネットが見られる可能性はあります。当社のサイエンティフィックカメラのセンサの対角線長は下の表でご覧いただけます。
チューブレンズの焦点距離またはカメラチューブの倍率により、顕微鏡全体の倍率が対物レンズの仕様の倍率と異なる場合、カメラセンサで視野の大きさも異なります。視野は下記で求められます。
Effective FN = Design FN x (System Magnification / Design Objective Magnification).
| Camera Family | Format (Diagonal) |
|---|---|
| Zelux® 1.6 MP CMOS | 1/2.9" (6.2 mm) |
| Kiralux® 1.3 MP CMOS | 1/2" (7.76 mm) |
| Quantalux® 2.1 MP sCMOS | 2/3" (11 mm) |
| Kiralux 5 MP CMOS | |
| Kiralux 5 MP Polarization CMOS | |
| Kiralux 2.3 MP CMOS | 1/1.2" (13.4 mm) |
| Kiralux 8.9 MP CMOS | 1" (16 mm) |
| Kiralux 12.3 MP CMOS | 1.1" (17.5 mm) |

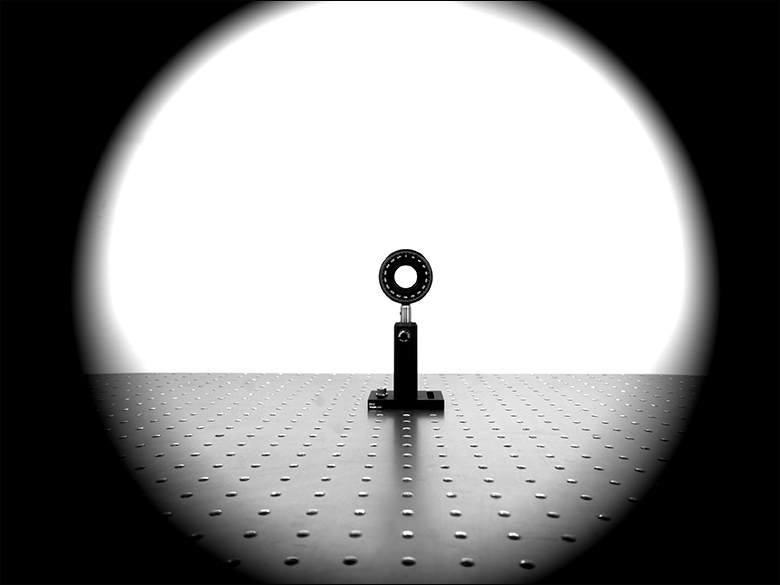
図3: ビネット効果は、上の2枚の画像でご覧いただけます。どちらも同じ4/3インチフォーマットカメラを使用しています。a: 焦点距離12 mmの4/3インチフォーマットレンズを使用しています。フル画像を生成していますが、縁周りが若干暗くなっています。ここで少し現れているビネットは、レンズのエッジ部分の透過率が低い設計になっていることが起因しています。b: 2/3インチフォーマットレンズを同じ焦点距離で使用しました。写真の縁周りの暗い輪がはっきりと現れています。
| Recommended System Requirements | |
|---|---|
| Operating System | Windows® 7, 10, or 11 (64 Bit) |
| Processor (CPU)a | ≥3.0 GHz Intel Core (i5 or Newer) |
| Memory (RAM) | ≥8 GB |
| Hard Drive | ≥500 GB (SATA) Solid State Drive (SSD)b |
| Graphics Card | Dedicatedc Adapter with ≥256 MB RAM |
| Power Supply | ≥600 W |
| Motherboard | Integrated Intel USB 3.0 Controller or One Unused PCIe x1 Slot (for Item # USB3-PCIE) |
| Connectivity | USB or Internet Connectivity for Driver Installation |
カメラインターフェイス
カメラを使用する際は、PCが右表のシステム要件を満たしていることを確認する必要があります。満たさない場合、特に記憶媒体に直接カメラ画像をストリーミング保存する際、フレーム落ちが起こる可能性があります。
定義
- カメラフレームレート: 1秒あたりにカメラが生成する画像数。カメラのモデルとユーザ設定によって変わります。
- 有効フレームレート: ホストPCのカメラソフトウェアが受信した1秒あたりの画像数。インターフェイスハードウェア(チップセット)の制限、CPUの性能、そしてホストPCのリソースを共有するほかのデバイスやソフトウェアによって変わります。
- 最大帯域幅:カメラがインターフェイスを介して、ホストPCにデータを転送する際の最大速度(ビット/秒またはバイト/秒)。最大帯域幅はインターフェイスの性能のベンチマークで、ホストPCがその速度でデータを受信し、処理できることを想定しています。最大帯域幅が高いインターフェイスは一般的に数値の高いカメラフレームレートをサポートしますが、インターフェイスの選択だけでカメラのフレームレートが増加するわけではありません。
USB 3.0
USB3.0は最新のPCのほとんどに標準装備されているインターフェイスで、通常、追加のハードウェアは必要ありません。USB3.0ポートが付いていないPCをお持ちの場合には、PCIeカードを別途販売しております(下記参照)。USB3.0は320 MB/sまでのデータ転送速度および3 mまでのケーブル長に対応しますが、速度はホストPCのチップセットの影響を受ける可能性があります。PCのUSB3.0マルチポートまたはUSB3.0ハブを使用すれば複数のカメラに対応可能です。
サイエンティフィックカメラ用インターフェイスの概要
| Interface | USB 3.0 |
|---|---|
| Interface Image (Click to Enlarge) |  |
| Maximum Cable Length | 3 m |
| Maximum Bandwidtha | 320 MB/s |
| Support for Multiple Cameras | Via Multiple USB 3.0 Ports or Hub |
| Available Cameras | Zelux® 1.6 MP CMOS Kiralux® 1.3 MP CMOS Quantalux® 2.1 MP sCMOS Camera Kiralux 2.3 MP CMOS Cameras Kiralux 5 MP CMOS Cameras Kiralux 5 MP CMOS Polarization Camera Kiralux 8.9 MP CMOS Cameras Kiralux 12.3 MP CMOS Cameras |
カメラのトリガ操作
当社のサイエンティフィックカメラには3種類の外部トリガモード(ストリーミングオーバーラップ、非同期トリガ、バルブ撮影)があります。動作には外部で生成したトリガーパルスが必要です。トリガーモードは、読み出し(例:20または40 MHz;ビニング)設定や利得、オフセットとは別に動作します。下の図1~3はこれらのトリガーモードのタイミング図です。アクティブロー外部TTLトリガを想定しています。なお、Zelux®カメラについてはFVAL信号が出力されません。Zeluxカメラのタイミング図についてはこちらからご覧ください。
Click to Enlarge
図1: ストリーミングオーバーラップ露光。外部トリガ信号がローになると、露光が始まり、ソフトウェアで選択した時間の間露光し、読み出されます。このシーケンスは設定された時間間隔で繰り返されます。後続の外部トリガは、カメラ動作が停止するまで無視されます。
Click to Enlarge
図2: 非同期トリガ取得モード。外部トリガ信号がローになると、プリセットされた時間の間露光がはじまり、カメラで読み出されます。読み出し時間の間、外部トリガは無視されます。 1つの読み出しが終わると、カメラは外部トリガ信号がローになったときのみ次の露光を始めます。
Click to Enlarge
図3: バルブ撮影モード。外部トリガ信号がローになると露光が始まり、ハイになると露光が終わります。カメラの読み出し中のトリガ信号は無視されます。

図4: ThorCamカメラの設定画面。赤と青の枠内ではトリガの設定を示しています。
外部トリガ機能により、カメラをほかの外部接続装置と同期させる必要のあるシステムに簡単に組み込むことができます。ストロボ出力がハイになると露光を示します。よってストロボ信号は外部機器とカメラの露光を同期させるためのシステムに使用できます。外部トリガはカメラの補助ポートへの接続が必要です。当社では補助ケーブル8050-CAB1を別途ご用意しております。個々の信号を分岐する製品は2種類あります。TSI-IOBOBには、各信号用にSMAコネクタが付いています。また、TSI-IOBOB2には、SMAコネクタのほかにArduinoボード用のシールド機能が付いており、その他の周辺機器の制御が可能です。これらのアクセサリの詳細については下記をご覧ください。
トリガの設定はThorCamソフトウェアで調整可能です。図4はカメラの設定画面です。トリガの設定を赤と青の枠で示しています。設定は以下の通り調整できます。
- 「HW Trigger」(赤枠内)が「None」に設定されている: ThorCamのキャプチャーボタンが押されると、カメラは「Frames per Trigger」に設定されたフレーム数を取得します。
- 「HW Trigger」が「Standard」に設定されている:2通りあります。
- 「Frames per Trigger」(青枠内)がゼロ、または>1の場合: カメラはストリーミングオーバーラップ露光モードで動作します(図1参照)。
- 「Frames per Trigger」が1の場合: カメラは非同期トリガ取得モードで動作します(図2参照)。
- 「HW Trigger」が「Bulb (PDX) Mode」に設定されている: カメラはバルブ撮影モードで動作します(図3参照)。
またトリガの極性を「HW Trigger Polarity」の枠内で(図4の赤枠内)「On High」(露光が立ち上がりエッジで開始される)または「On Low」(露光が立ち下がりエッジで開始される)に設定することができます。
Equal Exposure Pulse(EEP)モード
多くのCMOSセンサではローリングシャッタが採用されており、各列は順番に電荷の収集を開始します(CCDセンサの場合はグローバルシャッタが採用されており、電荷の収集は同時に行われます)。従ってCMOSセンサの場合は、カメラの露光中に外部光源をオンにすると、列ごとに照射時間が異なり、画像全体にわたって露光量の勾配が発生する原因になります。EEPはQuantalux sCMOSカメラのI/Oコネクタから出力される信号です。ThorCamの設定ダイアログでEEPを選択すると、ストロボ出力信号は再構成されて、CMOSセンサのローリングリセット機能が完了してからでないとアクティブにならなくなります。この信号はセンサのローリング読み出し機能が開始されるまでアクティブのまま維持されます。つまり、この信号はセンサの全てのピクセルがリセットされてから、実際に電荷を蓄積できる間だけアクティブになります。これにより、最終的な画像にはローリングリセットセンサに一般的にみられる露光量の勾配が発生しません。図5は、ストロボ出力信号を使用した露光の1例です。ここでは、ストロボ出力を使用して外部光源を動作させています。最終的な画像に勾配が見られますが、これは光源がオンの時の各センサ列の電荷蓄積時間が異なるためです。図6は、EEP露光の1例です:露光時間が長くなっており、トリガ出力信号は全ての列が電荷を蓄積するタイミングまでシフトして、フレーム全体にわたり照射時間が均一になった画像を取得することができます。
EEPは連続的に照射されている画像に対しては効果がありません。EEPモードを使用するのに適した条件がいくつかありますが、詳しくはUser Guideに記載されています。
Click to Enlarge
図5: STROBE_OUTを使用して露光中に外部光源を動作させる露光タイミングの例。光源がオンになっている間の各センサ列の電荷蓄積時間が異なるため、画像全体に勾配が生じています。
Click to Enlarge
図6: EEPを使用した露光のタイミング例。 全てのセンサ列が電荷を蓄積できる間だけEEP信号が光源をオンにするため、画像に勾配は見られません。
例:サイエンティフィックカメラ用アクセサリを使用したカメラのトリガ構成例
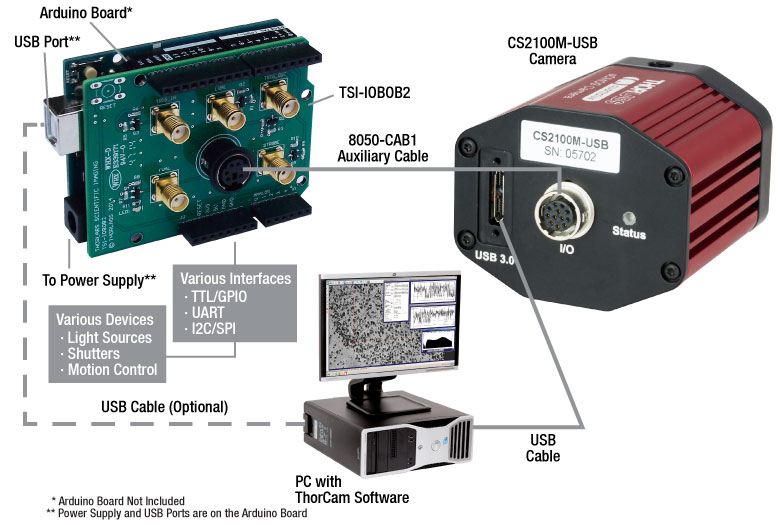
図7: システム統合と制御を容易にするTSI-IOBOB2を使用したシステム概略図
システム制御にカメラトリガを組み込んだ例が図7で示されています。図では、カメラがArduino用シールド付きブレイクアウトボードTSI-IOBOB2にケーブル8050-CAB1で接続されています。シールドのピンを利用して信号を出力することにより、光源、シャッタならびにモーションコントロールデバイスなどの周辺機器を同時制御することも可能です。制御プログラムをArduinoボードに書き込んだ後、ホストPCからUSB接続を取り外せば、スタンドアローンのシステム制御が可能なプラットフォームとなります。またUSBを接続したままにすればArduinoとPCの双方向通信が可能となります。外部トリガーモードは上記で説明したとおりThorCamを使用して設定します。
用途
概要
当社のサイエンティフィックカメラは様々な用途に適しています。下の画像は当社の1.4 MP CCD(旧製品)、4 MP CCD(旧製品)、8 MP CCD(旧製品)そして高フレームレートCCD(旧製品)カメラを使用して取得しています。
画像の一部はこちらから解像度の高い16-bit TIFFファイルとしてダウンロードすることも可能です。16-bitファイルを見るには他のビュワーが必要となる場合があります。当社では無料でダウンロードが可能なImageJの使用をお勧めします。
| Standard, Customized, or OEM Cameras and Software for a Range of Applications (Click Each Image for Details) | |||||
|---|---|---|---|---|---|
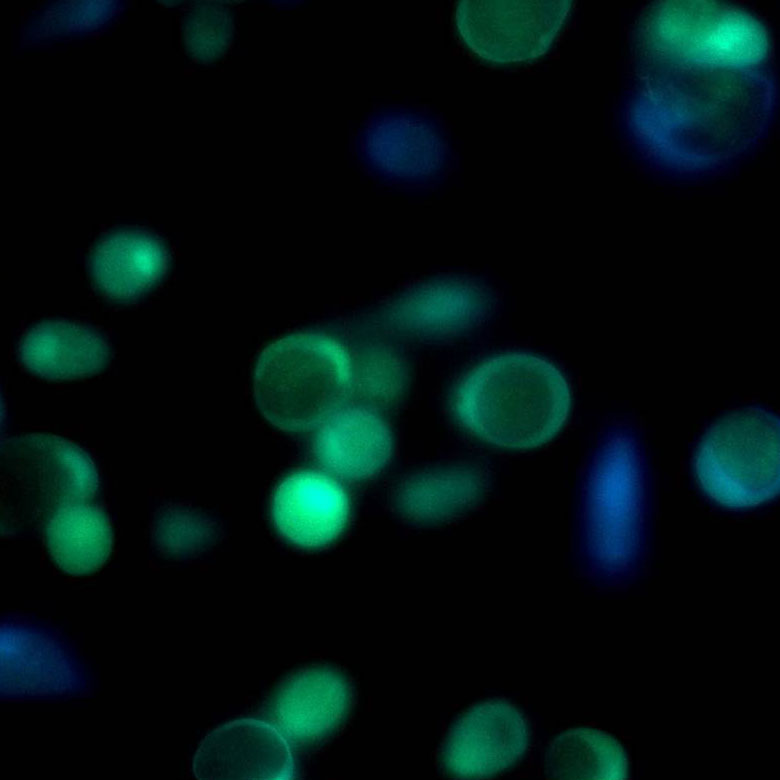 |  | 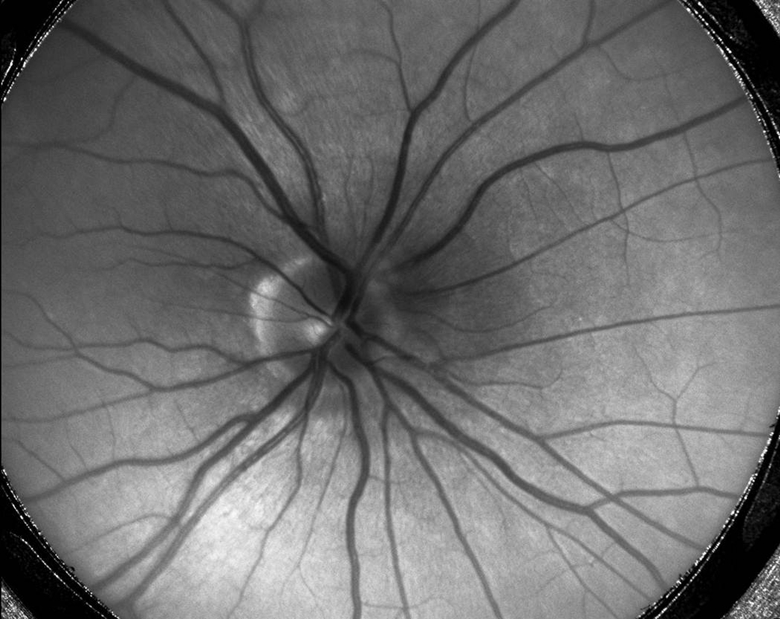 | 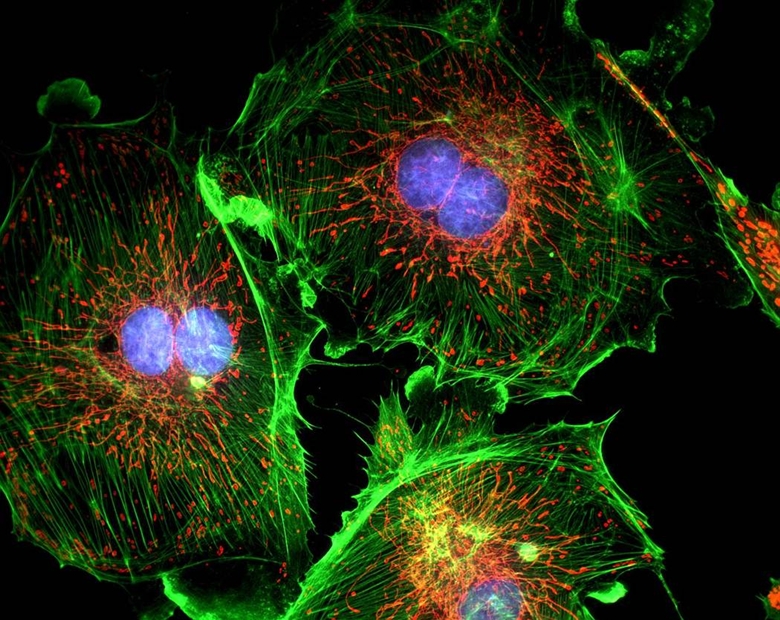 |  | 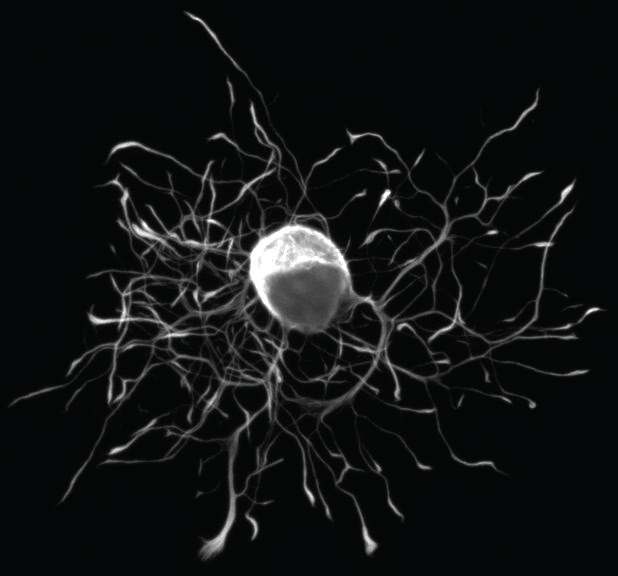 |
| Intracellular Dynamics | Brightfield Microscopy | Ophthalmology (NIR) | Fluorescence Microscopy | Multispectral Imaging | Neuroscience |
| Thorlabs' Scientific Cameras Recommended for Each Application Above | |||||
| Quantalux® 2.1 MP sCMOS | Kiralux® 1.3 MP CMOS Zelux™ 1.6 MP CMOS Kiralux 2.3 MP CMOS Kiralux 5 MP CMOS Kiralux 8.9 MP CMOS Kiralux 12.3 MP CMOS | Kiralux 1.3 MP CMOS Kiralux 2.3 MP CMOS Kiralux 5 MP CMOS Kiralux 8.9 MP CMOS Kiralux 12.3 MP CMOS | Quantalux 2.1 MP sCMOS Kiralux 2.3 MP CMOS Kiralux 5 MP CMOS Kiralux 8.9 MP CMOS Kiralux 12.3 MP CMOS | Quantalux 2.1 MP sCMOS Kiralux 2.3 MP CMOS Kiralux 5 MP CMOS | Quantalux 2.1 MP sCMOS Kiralux 2.3 MP CMOS Kiralux 5 MP CMOS Kiralux 8.9 MP CMOS Kiralux 12.3 MP CMOS |
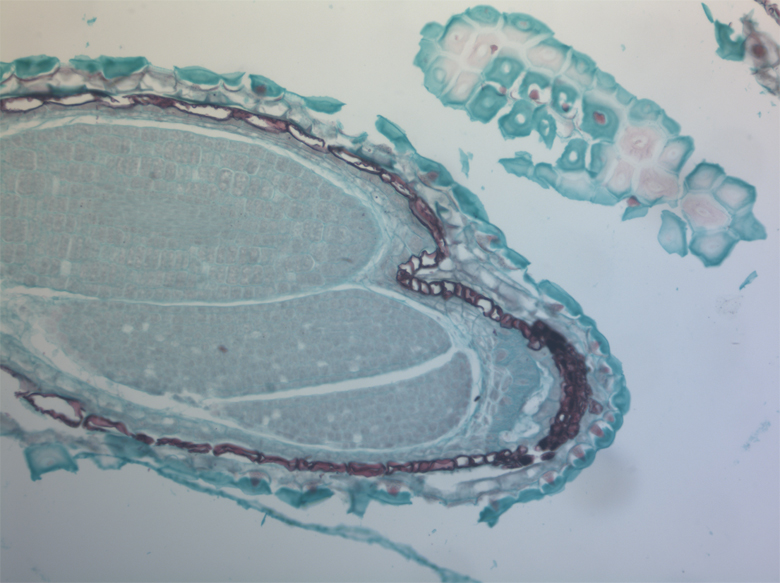
マルチスペクトルイメージング
右の動画は液晶チューナブルフィルタ(LCTF)をモノクロカメラの前においてマルチスペクトルイメージを取得している例です。スライドガラス上の試料は広帯域光で照射され、試料を透過した光のうち、特定のスペクトルのみがLCTFにより透過されます。モノクロ画像はモノクロサイエンティフィックカメラを使用して取得し、スペクトル分離した2次元画像の集合体(スタック画像)になります。このデータは割合や閾値を求めたり、スペクトルアンミキシングなどの定量的分析に使用できます。
こちらの例では、成熟したナズナの胚を当社の液晶チューナブルフィルタKURIOS-WBを使用し、420 nm~730 nmの波長範囲で高速に走査しています。画像はサイエンティフィックカメラ1500M-GE(旧製品)で取得しています。カメラは、液晶フィルタとともにCerna®顕微鏡に接続されています。システム全体の倍率は10倍です。最終的なスタック・復元画像は以下の通りです。
Click to Enlarge
最終的なスタック・復元画像
血栓症研究
血栓症とは血管内で血の塊が形成され、循環系における血流が閉塞することです。下は、Medical College of WisconsinのDr. Brian Cooleyによるマウスの大血管血栓症の実験研究の動画です。3種類のレーザ(532 nm、594 nm、650 nm)を一旦拡大し、麻酔をかけたマウスの露出手術部位の顕微鏡観察視野に集光しました。フィルターホイールを内蔵したカスタム仕様の1.4メガピクセルカメラ(旧製品)をLeica製顕微鏡に取り付けることによって、手術部位から放射される低量の蛍光を捉えます。詳細については下の動画と説明をご覧ください。
動脈血栓症
In the video above, a gentle 30-second electrolytic injury is generated on the surface of a carotid artery in an atherogenic mouse (ApoE-null on a high-fat, “Western” diet), using a 100-micron-diameter iron wire (creating a free-radical injury). The site (arrowhead) and the vessel are imaged by time-lapse fluorescence-capture, low-light camera over 60 minutes (timer is shown in upper left corner – hours:minutes:seconds). Platelets were labeled with a green fluorophore (rhodamine 6G) and anti-fibrin antibodies with a red fluorophore (Alexa-647) and injected prior to electrolytic injury to identify the development of platelets and fibrin in the developing thrombus. Flow is from left to right; the artery is approximately 500 microns in diameter (bar at lower right, 350 microns).
静脈血栓症
In the video above, a gentle 30-second electrolytic injury is generated on the surface of a murine femoral vein, using a 100-micron-diameter iron wire (creating a free-radical injury). The site (arrowhead) and the vessel are imaged by time-lapse fluorescence-capture, low-light camera over 60 minutes (timer is shown in upper left corner – hours:minutes:seconds). Platelets were labeled with a green fluorophore (rhodamine 6G) and anti-fibrin antibodies with a red fluorophore (Alexa-647) and injected prior to electrolytic injury to identify the development of platelets and fibrin in the developing thrombus. Flow is from left to right; the vein is approximately 500 microns in diameter (bar at lower right, 350 microns).
参考文献: Cooley BC. In vivo fluorescence imaging of large-vessel thrombosis in mice. Arterioscler Thromb Vasc Biol 31, 1351-1356, 2011. All animal studies were done under protocols approved by the Medical College of Wisconsin Institutional Animal Care and Use Committee.
Click to Enlarge
NIR/DICおよび蛍光イメージングを同時に行うためのセットアップ
2チャンネルのライブイメージング
多くのライフサイエンスにおけるイメージング実験では、変化する実験条件下で長時間にわたって細胞サンプルに対する試験とイメージングが行われます。このような実験において複雑な細胞ダイナミクスをモニタする一般的な手法の1つとして、蛍光物質を用いてサンプル内の関連する細胞を識別し、同時に近赤外顕微鏡または微分干渉(DIC)顕微鏡を用いて個々の細胞を精査する方法があります。変化する実験条件をモニタしながら2つの顕微鏡画像を記録するのは、困難でフラストレーションのたまる作業です。
ライブオーバーレイイメージングでは、合成画像を構成する両方の画像をリアルタイムでアップデートします。このような方法以外には、静止画像をリアルタイムでオーバーレイする方法があります。静止画像をオーバーレイする場合、システムやサンプル内のドリフト、またはサンプルの位置変化により、静止画像を頻繁にアップデートする必要があります。ライブオーバーレイイメージングの場合は、両チャネルのライブストリーミングが得られるため、その必要性は無くなります。
ThorCamオーバーレイプラグインと2台カメラ用顕微鏡マウントを併用することで、両方のカメラからのライブストリーミングによりアップデートで2チャンネルの合成画像をリアルタイムで取得できるため、静止画像のオーバーレイを頻繁にアップデートする必要がありません。このライブイメージング法はカルシウムレシオイメージングや電気生理学の用途に適しています。
画像例
蛍光画像とDIC画像の同時取得
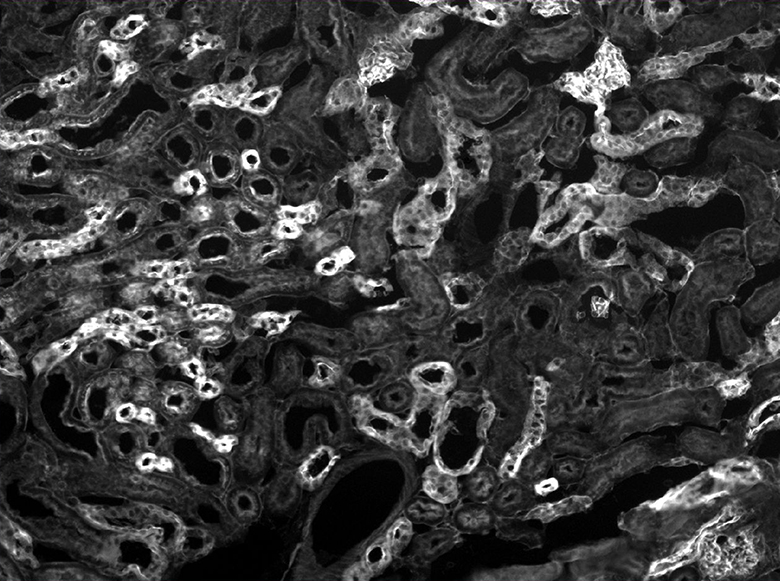
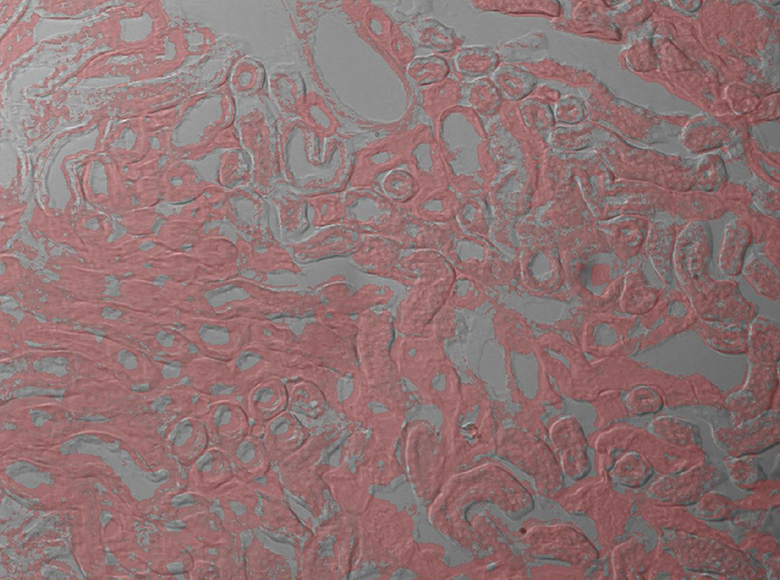
下の一連のイメージはマウスの腎臓細胞の画像で、ダイクロイックフィルタを用いて蛍光信号とDIC信号を分離し、それぞれを別のカメラで撮像しています。それらの画像は、ThorCamオーバーレイプラグインによって2チャンネルの合成ライブ画像にまとめられ、また蛍光色素は擬似カラー化されています。

Click to Enlarge
上のDIC画像では、ピペットがフレームの中央近くに2本の線として写っています。
マイクロピペットを用いたマイクロアスピレーション
右の画像は、蛍光画像とDIC画像を同時に重ね合わせたライブ画像です。この実験は、マイクロピペットを用いてGFPを発現する単一ニューロンを分離するマイクロアスピレーション技術によってできています。このニューロンは、その後、PCRに利用できます。この画像は当社の1.4メガピクセルカメラ(旧製品)と2台カメラ用マウントを用いて取得したもので、ThorCamプラグインにより蛍光画像とDIC画像をライブでオーバーレイしています。画像ご提供:Ain Chung, in collaboration with Dr. Andre Fenton at NYU and Dr. Juan Marcos Alarcon at The Robert F. Furchgott Center for Neural and Behavioral Science, Department of Pathology, SUNY Downstate Medical Center.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
近赤外Dodtコントラスト画像と落射蛍光画像の同時イメージング
右の画像は、CX3CR1-GFPマウスの50 µmの脳切片の蛍光ならびに近赤外Dodtコントラスト画像をライブで同時に重ね合わせた画像です。マウスはPECAM-1で免疫染色され、Alexa-687で血管がハイライトされています。Dodtコントラスト法では、1/4円環と拡散板を使用して試料面に照射される光に勾配を生じさせ、厚みのある試料の構造を可視化します。こちらの画像は当社のサイエンティフィックカメラと2台カメラ用マウントを使用して取得しました。画像ご提供:Dr. Andrew Chojnacki(Department of Physiology and Pharmacology, Live Cell Imaging Facility, Snyder Institute for Chronic Diseases, University of Calgary)。
| Posted Comments: | |
lin xue li
(posted 2021-04-15 17:20:04.027) I am appreciate that your company‘s presentation,however,If you can provide more details of the photovoltaic conversion of CCD(circuit,such as resistance value) and the gain coefficient of ADC,so much the better,thank you! YLohia
(posted 2021-04-21 11:01:15.0) Thank you for contacting Thorlabs. These parameters are model- and configuration-dependent. In other words, it depends on the camera model and sensor. Are you inquiring about a specific camera? If so, what's the part number? Additionally, could you please explain what you mean mean by "resistance value"? I had reached out to you at the time of your posting with these questions but never heard back. Adrian Alvarez
(posted 2020-12-17 17:28:41.323) I just wanted to say thanks for posting this helpful information on camera basics. YLohia
(posted 2020-12-18 11:46:54.0) Thank you very much for your feedback! We're always striving to provide our customers with relevant information about our products. |