 Products Home
Products Homeモジュール型ピエゾコントローラ

- Two High Power Drive Outputs – 75 V, 500 mA
- Strain Gauge Closed Loop Nanometer Positioning
- Seamless Operation with Thorlabs Piezo Actuators
MPZ601
Full Suite of
Software Support
Tools Included










Please Wait
| Rack System Modules |
|---|
| 2-Channel Piezo Control Module |
| 2-Channel Stepper Motor Control Module |
| 2-Channel NanoTrak® Auto-Alignment Module |
| 2-Channel Brushless DC Motor Control Module |
| USB Motion Control 19" Rack Chassis |
| 当社のすべてのラックシステムモジュールはラックマウントシャーシMMR601またはMMR602と共にお使いください。ラックマウントシャーシから外した状態のモジュールの個別の操作はできません。 |
特長
- 静かで高分解能の位置決め制御(高精度の位置決め用途向け)
- ランプ電圧および波形発生機能(走査用)
- 高帯域幅(10 kHz)のピエゾ位置決め
- 当社の識別機能付きピエゾアクチュエータ用の自動設定機能あり
- ユーザ制御のデジタルI/Oポート
- ユーザI/Oポート(ロジック入力/出力、ポテンショメータ入力)
- Kinesis®ソフトウェア一式が付属
- 直感的操作が可能なグラフィック制御パネル
- 当社のほかのモーションコントローラとソフトウェア上で完全統合(統合システム開発可能)
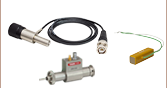
ピエゾアクチュエーターモジュールMPZ601は、2チャンネルの高出力(75 V、500 mA)ピエゾコントローラです。当社のすべての開ループ・閉ループのピエゾ駆動ナノポジショニングアクチュエータやステージを駆動できるよう設計されています。各チャンネルにはひずみゲージフィードバック回路が付いており、当社のアクチュエータで動作させるとナノメートル領域での閉ループ位置決めを行うことができます。さらに、柔軟なソフトウェア設定によって細かい設定が可能なので、他社製の様々なピエゾ素子の駆動にも適しています。このユニットは、波形発生機能とトリガ出力の組み合わせにより、特にピエゾ走査用途に適します。
モジュールは最新の高速DSP(デジタルシグナルプロセッサ)と低ノイズアナログ回路を搭載しており、柔軟性の高いモーションコントロール用19インチラックマウントシャーシMMR601やMMR602に適合するよう設計されています。ラックに複数のピエゾモジュールMPZ601を取り付けられるため(1ラック当たり最大12チャンネルの動作が可能)、多軸でナノメートルレベルのモーションコントロールが要求される、大規模でアライメントが不可欠な用途に対応します。
ラックマウントシャーシMMR601、MMR602は、USB接続によってPCで簡単に操作でき、標準的なUSBハブ技術により複数のユニットを1台のPCに接続することができます。Kinesisソフトウェアと組み合わせることにより、これらの機能を短時間で起動し、動作を開始することができます。広範なKinesisプログラミング環境(「Kinesisソフトウェア」タブ参照)を使用すれば、より高度なカスタム仕様のモーションコントロールやシーケンスも可能となります。
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに付属しており、コントローラには付属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。
| Other Piezo Driver Controllers | |||
|---|---|---|---|
| K-Cube® Controller and Strain Gauge Reader Single-Channel | Open Loop Benchtop Controller 1- and 3-Channel | Closed Loop Benchtop Controller 1- and 3-Channel | Rack System Module 2-Channel |
モジュール仕様
| Specification | Value |
|---|---|
| Piezoelectric Output (SMC Male) - Per Channel | |
| Voltage (Software Control) | 0 to 75 V DC |
| Voltage (External Input) | -10 to 90 V DC |
| Current | 500 mA Max Continuous |
| Stability | 100 ppm Over 24 hours (After 30 mins Warm-Up Time) |
| Noise | < 3 mV RMS |
| Typical Piezo Capacitance | 1 to 10 µF |
| Bandwidth | 10 kHz (1 µF Load, 1 Vp-p) |
| Position Feedback (9-Pin D-type Female) - Per Channel | |
| Feedback Type | AC Bridge or 0 - 10 V Differential DC (SW Selectable) |
| AC Feedback Transducer Type | Strain Gauge |
| AC Detection Method | AC Bridge (18 kHz Excitation) |
| Typical AC Feedback Resolution | 5 nm (for 20 µm Actuator e.g. PAZ005) |
| Auto-Configure | Identification Resistance in Actuator |
| User Input/Output (26-Pin D-type Female) | |
| Potentiometer Input (Per Channel) | Reference + Wiper (50 kΩ 10 Turn Pots) |
| HV Output Monitor (Per Channel) | 0 to 10 V DC |
| 4 Digital Inputs | TTL Levels |
| 4 Digital Outputs | Open Collector |
| Trigger Input/Output | TTL |
| Trigger Input Functionality | Triggered Voltage Ramps/Waveforms |
| Trigger Output Functionality | Trigger Generation During Voltage Ramp Output |
| User 5 V (with Ground) 250 mA Max | |
| General | |
| Housing | Single Rack System Bay |
| Dimensions (W x D x H) | 190 x 270 x 50 mm (7.5" x 10.6" x 2") |
| Weight | 1.5 kg (3.3 lbs) |
ユーザI/Oコントローラ
Dタイプメス型
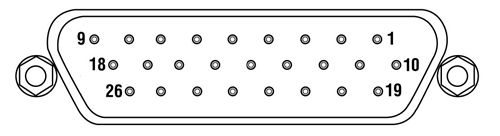
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | DIG I/P 1a | 19 | 10 | DIG O/P 1a | 19 | 19 | Isolated Groundb | - |
| 2 | DIG I/P 2a | 19 | 11 | DIG O/P 2a | 19 | 20 | Ext Trigger I/P | 22 |
| 3 | DIG I/P 3a | 19 | 12 | DIG O/P 3a | 19 | 21 | Ext Trigger O/P | 22 |
| 4 | DIG I/P 4a | 19 | 13 | DIG O/P 4a | 19 | 22 | Ground | - |
| 5 | Channel 1 RS485 (+) | - | 14 | Channel 2 RS485 (+) | - | 23 | 5 V User O/P (Isolated) | - |
| 6 | Channel 1 RS485 (-) | - | 15 | Channel 2 RS485 (+) | - | 24 | Not Used | - |
| 7 | Not Used | - | 16 | Not Used | - | 25 | Analog or Potentiometer Ground | - |
| 8 | Channel 2 10 V O/Pc | 25 | 17 | Potentiometer Wiper Ch 2 | - | 26 | Potentiometer Reference | 25 |
| 9 | Channel 1 10 V O/Pc | 25 | 18 | Potentiometer Wiper Ch 2 | - |
ピエゾコントローラ
Dタイプメス型
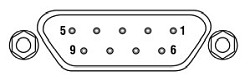
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | Wheatstone Bridge Excitation | 4 or 6 | 4 | d.c.(+) or Equipment Groundc | - | 7 | d.c.(-) or Actuator ID Signalbc | 4 or 6 |
| 2 | +15Va | 4 or 6 | 5 | Feedback Signal In | 4 or 6 | 8 | RS485 (-) | 9 |
| 3 | -15Va | 4 or 6 | 6 | Equiptment Ground | - | 9 | RS485 (+) | 8 |
Ext In (+)およびExt In (-)
BNCメス型
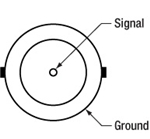
差動入力。この2つの入力の差動信号によって、HV増幅回路からの出力電圧を部分的に制御するように設定できます。 「Input Source」としてBNCオプションを含む設定にすると、ユニットは選択された他の入力信号(GUIパネルの「Output」制御でセットされた電圧、および外部ポテンショメータからの電圧)にこの差動信号を加算します。
HV Out
SMC

0~75 V、0~250 mA。 駆動信号をピエゾアクチュエータに送ります。
ピエゾアクチュエータの帯域幅に関するチュートリアル
多くの高速用途では、ピエゾ素子の形状変化する速度を知ることが必須となります。 ピエゾコントローラとピエゾ積層の帯域幅は、下記の数値がわかることで、計算で求められるようになります。
- コントローラが供給可能な最大電流量。下記で例としてとりあげられているBPCシリーズのピエゾコントローラでは、この数値は0.5 Aです。
- ピエゾ素子の負荷容量。容量が大きいほどシステムは遅くなります。
- 信号振幅の最適値(V)。この振幅がピエゾ素子の伸長寸法を決定します。
- ドライバの最大帯域幅。この数値は駆動負荷に依存しません。
出力コンデンサを駆動する際には、帯電と放電にそれぞれ電流が必要です。 帯電電荷の変化dV/dtはスルーレートと呼ばれています。 静電容量が大きいほど、必要とされる電流量は大きくなります。
例えば100 µmのピエゾ積層において静電容量が20 µFで、最大電流量が0.5 AのBPCシリーズピエゾコントローラで駆動されるとき、スルーレートは下記の数式で求められます。

したがって電圧が瞬間的に0 V から75 Vに変化するとき、出力電圧が75 Vに達するには3 msかかります。
注記: これらの計算式においては、ドライバの最大帯域幅は計算によって得られる帯域幅よりもずっと大きな値であり、ドライバの帯域幅は制限要因とならないことを前提としています。 なおこれらの数式が、開ループシステムにしか適用できない点にご注意ください。 閉ループモードでは、フィードバックループの応答の遅延がさらに帯域幅を制限します。
正弦波信号
システムの帯域幅は、通常は所定の振幅の正弦信号に対するシステムの応答により規定します。 正弦信号のピーク振幅がA、ピーク‐ピーク電圧がVpp、そして周波数がfの条件で駆動されているピエゾ素子については、以下の数式が成立します。

右の図は、時間の経過とともに変化する電圧を表しています。 スルーレートの最大値、または電圧の最大の変化は、t = 2nπ, (n=0, 1, 2,...)が成立する時点となり、右図では点 aで示されています。

上記の数式から下記が導出できます。

それゆえに下記が成立します。
上記の例では最大電圧(75 V)での帯域幅は下記の値になることがわかります。
 .
.
ピエゾが小さく、静電容量が1/10になると、結果は10倍向上して約1060 Hzとなります。 また、積層が100 µmのままであっても、ピーク‐ピーク電圧が7.5 V(10% の最大振幅値)であれば、結果は同様に10倍向上して約1060 Hzとなります。
三角波信号
ピエゾアクチュエータが三角波で駆動される場合、最大電圧がVpeakで、最小電圧が 0の時、スルーレートは勾配もしくは下記に等しくなります。
![]() .
.
あるいはf = 1/Tであるので、下記が導出できます。

矩形波信号
ピエゾアクチュエータが矩形波で駆動される場合、最大電圧がVpeakで、最小電圧が 0の時、スルーレートが最小の立ち上がりと立ち下がりの数値を制限します。この条件では、信号の立ち上がりまたは立ち下がりの途中では、スルーレートは勾配に等しくなります。 trが最小立ち上がり時間であるとき、下記の数式が成り立ちます。
この式により、下記の数式が成立することもわかります。
 .
.
ピエゾの動作や理論についてはピエゾ素子のチュートリアルをご参照ください。
ソフトウェア
Kinesisバージョン1.14.52
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Figure 58A KinesisソフトウェアのGUI画面
当社のKinesis®ソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cube®など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
| Posted Comments: | |
Ali xam
(posted 2025-01-27 08:55:35.51) Hello, I plan to use two of your controllers to control the position of four piezo actuators, model Mapia-01. Do you think this controller is suitable for this model? Is one modular rack enough to connect two controllers to a PC? cstroud
(posted 2025-02-03 09:00:51.0) Thanks for reaching out. The MPIA is a piezo inertia actuator and wouldn't be compatible with this type of piezo controller. I will contact you directly to discuss this further. user
(posted 2024-05-07 14:25:45.367) I could not find in the Specs information the bit resolution of the MPZ601 controller. Does Thorlabs have that information available? E.g., what is the smallest voltage step that this controller can achieve? spolineni
(posted 2024-05-15 04:38:53.0) Thank you for your inquiry. The DAC used to generate the output voltage determines the theoretical resolution in open loop. Practical factors, including offset and gain variations, limit this to around 2 mV. Noise and non-linearity of the DAC affect the output, causing unequal step sizes and deviations from the ideal linear progression. These factors collectively determine the complex, multi-variable performance. Mike Jaris
(posted 2021-09-20 14:44:27.423) Why is there a USB symbol next to this device that does not have a USB port?? cwright
(posted 2021-09-21 05:30:12.0) Response from Charles at Thorlabs: Thank you for your query. These modules are intended for use in the MMR601 Rack Enclosure which provides USB connectivity for up to six modules. Laurie
(posted 2009-02-05 15:34:15.0) Response from Laurie at Thorlabs to melsscal: Thank you for your inquiry about our MPZ601, which can work as piezo controller. However, if you want nano track function for auto alignment, youll need to use the MNA601 controller module, which requires either the MMR601 or MMR602 chassis. Each controller module has two channels, so if you wish to control all three channels, youll need two modules. Please contact our technical support department if youd like to discuss your particular application with someone. melsscal
(posted 2009-02-05 03:51:52.0) Can we use MPZ601 with MAX313/M as nano track controller ? |