Products Home
Products HomeUSBモーションコントロール用シャーシ、19インチラック用

- Up to 12 Drive Channels in a Single Chassis
- DC Servo Motor, Stepper Motor, Piezo, and Auto-Alignment Driver Module
- Ideal for Creating Multi-Axis Integrated Positioning Systems
MMR601
Full Suite of Software Support Tools Included






Please Wait
| Rack System Motion Controller Modules |
|---|
| 2-Channel Brushless DC Motor Controller Module |
| 2-Channel Stepper Motor Controller Module |
| 2-Channel Piezo Controller Module |
| 2-Channel NanoTrak® Auto-Alignment Module |
| USB Motion Control 19" Rack Chassis |
特長
- 4種類の2チャンネルプラグインモジュール
- 4Uシャーシに6モジュール用のスロット
- USB接続によるプラグ&プレイ
- 1台のホストPCで複数のラックを制御
- Kinesis制御用ソフトウェア一式が付属
- 直感的操作が可能なグラフィック制御パネルを表示するソフトウェア
- ソフトウェアにより当社のほかのモーションコントローラとの統合が可能
(統合システム開発)
19インチラック用システムMMR601(602)は、多軸モーションコントロール用に設計された、多チャンネル・多機能なモジュール構造の製品です。このシステムは、洗練された自立型の拡張可能な構造を有し、精密なモーションコントロールのためのプラットフォームとして機能します。モジュールシステムとして、ブラシレスモータードライバ(MBD)、ステッピングモータードライバ(MST)、ピエゾアクチュエータ(MPZ)、 NanoTrak®自動アライメント(MNA)を含む、多数の制御モジュールを組み合わせて操作することができます。当社の同等のベンチトップ型コントローラで開発された高度な高速デジタル信号処理(DSP)技術と低ノイズアナログ回路が使われています。
モジュール式ラックにはベンチトップで使用するためのカバー付き(MMR602)製品と、標準的な19インチキャビネットに取付けて使用するためのカバー無し(MMR601)製品がございます。このモジュールは高さ4U、幅19インチの筺体内に、高機能な12チャンネルのプラットフォームを装備することができます。
USB接続プラグ&プレイによりKinesisソフトウェアパッケージで簡単にPC制御が可能です。KinesisソフトウェアはNETコントロールが使用でき、最新のC、C#、Visual Basic、LabVIEW™、あるいはその他の.NETに対応する言語を使用してカスタムプログラムを作成するようなサードパーティの開発者も利用することができます。詳細については、「Kinesisソフトウェア」と「Kinesisチュートリアル」タブをご覧ください。
こちらのラックシステムはあらゆるベンチトップコントローラと組みあわせて操作することができ、全てを統合されたKinesisソフトウェアインターフェイスから制御することができます。これにより、ベンチトップ型、ラック型両方で共通の学習曲線を得ることができます。
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに付属しており、コントローラには付属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。
モーションコントロール用19インチラックシャーシ
| Item # | MMR601 & MMR602 |
|---|---|
| Enclosure | Standard 19" Rack, 4U High |
| Module Bays | 6 Modular Slots, Back Panel Access |
| Communications | USB 1.1 Interface |
| Power Input | |
| Voltage | 85 - 264 V AC |
| Frequency | 47 - 63 Hz |
| Power | 800 W |
| Fuse | 15 A |
| Dimensions (W x D x H) | 480 mm x 448 mm x 183 mm (19.0" x 17.6" x 7.0") |
| Weight | 16 kg (35.2 lbs) |
ブラシレスDCモーターコントローラ
| Item # | MBD602 |
|---|---|
| Number of Channels | 2 |
| Motor Drive Connector | 8-Pin DIN-Type, Female (Motor Phase Outputs, Stage ID Input) |
| Feedback Connector | 15-Pin D-Type, Female |
| Brushless Continuous Current Output | 2.5 A per Channel (5.0 A Max All-Channel Output) |
| Brushless Peak Current Output | 4.0 A per Channel (5.2 A Max All-Channel Output) |
| Pulse-Width Modulation Frequency | 20 kHz |
| Operating Modes | Position and Velocity |
| Control Algorithm | 16-Bit Digital PID Servo Loop with Velocity and Acceleration Feed Forward |
| Velocity Profile | Trapezoidal |
| Position Count | 32-Bit |
| Position Feedback | Incremental Encoder |
| Encoder Bandwidth | 2.5 MHz (10 M Counts/sec) |
| Encoder Supply | 5 V |
| AUX Control Connector | 26-Way High Density D-Type, Female (User Digital IO, 5 V O/P) |
| Input Power Requirements | Power: 250 VA Voltage: 100 to 240 V AC Frequency: 47 to 63 Hz |
| Dimensions | 187 mm x 286.6 mm x 50.4 mm (7.36" x 11.28" x 1.98") |
| Weight | 0.9 kg (1.98 lbs) |
| Compatible Motor Specs | 3-Phase DC Brushless Motors with Peak Power: 100 W, Coil Resistance: 0.1 to 100 Ω, Coil Inductance (Nominal): 1 to 100 mH, and Rated Phase Current (Nominal): 100 mA to 5 A |
ステッピングモーターコントローラ
| Item # | MST602 |
|---|---|
| Number of Channels | 2 |
| Motor Drive Connector | 15-Pin D-Type, Female 2-Phase Bi-Polar Motor Drive Output Differential Quadrature Encoder (QEP) Input Forward, Reverse Limit Switch Inputs Encoder 5 V (with Ground) |
| Motor Control Connector | 15-Pin D-Type, Female Jog Forward/Back Input (TTL) Enable/Disable Interlock (per Channel) Connect to Return to Operate Motor User 5 V (with Ground) 100 mA Max |
| User I/O Connector | 26-Pin D-Type, Female 4 Logic Inputs (TTL) 4 Logic Outputs (Open Collector) Trigger Input (TTL) Trigger Output (Open Collector) 2 Analog Inputs, Single Ended 0 - 10 V (12-Bit) |
| Resolution | 2048 Microsteps per Full Step 200 Step Motor - 409 600 Microsteps per Rev 24 Step Motor - 49 152 Microsteps/Rev |
| Motor Drive Voltage | Up to 48 V |
| Motor Drive Power | Up to 50 Wpeak/25 Wavg |
| Motor Speeds | Up to 3000 RPM (for 200 Full Step Motor) |
| Encoder Feedback Bandwidth | 500 kHz |
| Compatible Motor Specs | 2-Phase Bi-Polar Stepper Motors with Peak Powers: 5 to 50 W, Average Power: 25 W Maximum Step Angle Range: 20° to 1.8° Coil Resistance (Nominal): 4 to 15 Ω, Coil Inductance (Nominal): 4 to 15 mH Rated Phase Current (Nominal): 100 mA to 1 A |
| Housing | Single Rack System Bay |
| Dimensions (W x D x H) | 190 mm x 270 mm x 50 mm (7.5" x 10.6" x 2.0") |
| Weight | 1.5 kg (3.3 lbs) |
ピエゾコントローラ
| Item # | MPZ601 |
|---|---|
| Number of Channels | 2 |
| Piezoelectric Output (SMC Male) - Per Channel | |
| Voltage (Software Control) | 0 to 75 V DC |
| Voltage (External Input) | -10 to 90 V DC |
| Current | 500 mA Max Continuous |
| Stability | 100 ppm Over 24 hours (After 30 mins Warm-Up Time) |
| Noise | < 3 mV RMS |
| Typical Piezo Capacitance | 1 to 10 µF |
| Bandwidth | 10 kHz (1 µF Load, 1 Vp-p) |
| Position Feedback (9-Pin D-Type Female) - Per Channel | |
| Feedback Type | AC Bridge or 0-10 V Differential DC (SW Selectable) |
| AC Feedback Transducer Type | Strain Gauge |
| AC Detection Method | AC Bridge (18 kHz Excitation) |
| Typical AC Feedback Resolution | 5 nm (for 20 µm Actuator e.g. PAZ005) |
| Auto-Configure | Identification Resistance in Actuator |
| User Input/Output (26-Pin D-Type Female) | |
| Potentiometer Input (Per Channel) | Reference + Wiper (50 kΩ 10 Turn Pots) |
| HV Output Monitor (Per Channel) | 0 to 10 V DC |
| 4 Digital Inputs | TTL Levels |
| 4 Digital Outputs | Open Collector |
| Trigger Input/Output | TTL |
| Trigger Input Functionality | Triggered Voltage Ramps/Waveforms |
| Trigger Output Functionality | Trigger Generation During Voltage Ramp Output |
| User 5 V (with Ground) 250 mA Max | |
| General | |
| Housing | Single Rack System Bay |
| Dimensions (W x D x H) | 190 mm x 270 mm x 50 mm (7.5" x 10.6" x 2.0") |
| Weight | 1.5 kg (3.3 lbs) |
NanoTrak®自動アライメントモジュール
| Item # | MNA601/IR | |
|---|---|---|
| Number of Channels | 2 | |
| Signal Measurement | ||
| PIN Photodiode | ||
| Mechanical Connector | SMB Male | |
| Photocurrent Range | 1 nA to 10 mA | |
| Optical Connector | FC/PC | |
| NanoTraking | ||
| Circle Scanning Frequency | 1 to 300 Hz | |
| Circle Position Range | < 1% to > 99% MPE | |
| Circle Diameter Adj. Modes | Automatic and Manual | |
| Signal Phase Compensation | ±180° | |
| Piezoelectric Input/Output | ||
| Number of Piezo Channels | 2 | |
| HV Output Connectors | ||
| Connector Type | SMC Male | |
| Voltage Output | 0 to 75 VDC/Channel | |
| Voltage Stability | 100 ppm over 24 Hours | |
| Noise | < 3 mV (RMS) | |
| Output Current | 500 mA/Channel | |
| Analog Output Monitors | ||
| Connector Type | BNC | |
| Voltage Range | 0 to 10 VDC | |
| Strain Gauge Position Feedback | ||
| Connector Type | 9-Pin D-Type Female | |
| Feedback Type | AC | |
| Other Input/Output | ||
| Optical Power Monitor | ||
| Connector Type | BNC | |
| Voltage Range | 0 to 10 VDC | |
| Ext Signal In Input | ||
| Connector Type | BNC | |
| Voltage Range | 0 to 10 VDC | |
| User Control | ||
| Connector Type | 26-Pin HD D-Type Female | |
| Isolated Digital Inputs | 4 off TTL | |
| Isolated Digital Outputs | 4 off TTL | |
| Trigger Input | 1 off TTL | |
| Trigger Output | 1 off TTL | |
| Potentiometer Channel Ctrl Input | 1 - 10 kΩ (Each Channel) | |
| Analog Channel Output Monitors | 0 to 10 VDC (Each Channel) | |
| General | ||
| Dimensions (W x D x H) | 190 mm x 270 mm x 50 mm (7.5" x 10.6" x 2.0") | |
| Weight | 1.5 kg (3.3 lbs) | |
| Optical Detector Specifications for MNA601/IR | ||
|---|---|---|
| Item # | NTA009 (Sold Separately) | NTA007 (Included with Controller) |
| Detector Type | Si | InGaAs |
| Operating Wavelength | 320 - 1000 nm | 900 - 1700 nm |
| Active Area | Ø0.8 mm | Ø0.12 mm |
| Fiber Input | FC/PC | |
| Rise Time | 100 ps @ 12 V | |
| NEP | 1.5 x 10-15 W/√Hz | 4.5 x 10-15 W/√Hz |
| Dark Current | 0.01 nA (Typ.) @ 10 V | 0.05 nA (Typ.) @ 5 V |
| Junction Capacitance | 3.00 pF (Typ.) @ 10 V | 2.0 pF (Typ.) @ 5 V |
コントロールモジュールのピン配列
ブラシレスDCモーター制御モジュールMBD602
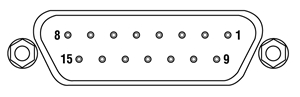
モータードライバ
8ピン、DIN型、メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase B | 5 | Stage ID |
| 2 | GND | 6 | Enable |
| 3a | Motor Phase D | 7 | Motor Phase C |
| 4 | Motor Phase A | 8a | +5 V |
フィードバック
15ピン、D型、メス
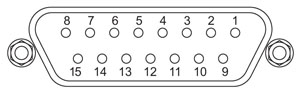
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Not Connected | 11 | Limit Switch - |
| 4 | Index - | 12 | Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7a | 5 V | 15 | Not Connected |
| 8a | 5 V |
ハンドセット
ミニDINメス型
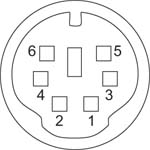
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input) | 4b | Supply Voltage for Handset 5 V |
| 2a | Ground | 5 | TX (Controller Output) |
| 3a | Ground | 6a | Ground |
AUX I/O
26方向高密度、D型、メス
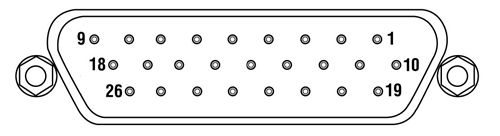
| Pin | Description | Function | Pin | Description | Function | Pin | Description | Function |
|---|---|---|---|---|---|---|---|---|
| 1a | Digital I/P 3 | - | 10a | Digital O/P 3 | - | 19c | Ground | - |
| 2a | Digital I/P 2 | - | 11a | Digital O/P 2 | - | 20e | Digital O/P 2+ | Motor #1 Encoder B+ |
| 3a | Digital I/P 1 | - | 12a | Digital O/P 1 | - | 21e | Digital O/P 2- | Motor #1 Encoder B- |
| 4a | Digital I/P 0 | - | 13a | Digital O/P 0 | - | 22e | Ground | - |
| 5e | Digital O/P 6- | Motor #2 Encoder A- | 14e | Digital O/P 4+ | Motor #2 Encoder IX+ | 23d | 5 V | - |
| 6e | Digital O/P 6+ | Motor #2 Encoder A+ | 15e | Digital O/P 4- | Motor #2 Encoder IX- | 24e | Digital O/P 1+ | Motor #1 Encoder IX+ |
| 7e | Digital O/P 5+ | Motor #2 Encoder B+ | 16e | Digital O/P 3- | Motor #1 Encoder A- | 25e | Digital O/P 1- | Motor #1 Encoder IX- |
| 8e | Digital O/P 5- | Motor #2 Encoder B- | 17e | Digital O/P 3+ | Motor #1 Encoder A+ | 26c | Ground | - |
| 9b | RS-232 RX | - | 18b | RS-232 TX | - |
ステッピングモーター制御モジュールMST602
モータI/Oコントローラ
D型、メス
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | User 5 V I/O | 9 | 6 | Channel 2 Emergency Stop Daisy Chain Link Returnb | 14 | 11 | Channel 2 Jog Backwardsa | 9 |
| 2 | Channel 1 Jog Forwardsa | 9 | 7 | Channel 2 Enable Returnb | 15 | 12 | Channel 1 Emergency Stop Daisy Chain Linkb | 4 |
| 3 | Channel 2 Jog Forwardsa | 9 | 8 | Not Used | - | 13 | Channel 1 Enableb | 5 |
| 4 | Channel 1 Emergency Stop Daisy Chain Link Returnb | 12 | 9 | User 0 V | - | 14 | Channel 2 Emergency Stop Daisy Chain Linkb | 6 |
| 5 | Channel 1 Enable Returnb | 13 | 10 | Channel 1 Jog Backwardsa | 9 | 15 | Channel 2 Enableb | 7 |
ユーザI/Oコントローラ
D型、メス
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | Digital I/P 1 | 19 | 10 | Digital O/P 1 | 19 | 19 | Digital Ground 1 (0 V)c | - |
| 2 | Digital I/P 2 | 19 | 11 | Digital O/P 2 | 19 | 20 | Ext Trigger I/P | 22 |
| 3 | Digital I/P 3 | 19 | 12 | Digital O/P 3 | 19 | 21 | Ext Trigger O/P | 22 |
| 4 | Digital I/P 4 | 19 | 13 | Digital O/P 4 | 19 | 22 | Digital Ground 2 (0 V)c | - |
| 5 | Channel 1 RS232 TX | - | 14 | Channel 2 RS232 TX | - | 23 | 5 V User O/P (50 mA Max.) | - |
| 6 | Channel 1 RS232 RX | - | 15 | Channel 2 RS232 RX | - | 24 | Reserved for Future Use | - |
| 7 | Not Used | - | 16 | Reserved for Future Use | - | 25 | Reserved for Future Use | - |
| 8 | Channel 2 Analog I/P (+)b | 17 | 17 | 0 V (Analog Rtn)b | 8 | 26 | Analoga Ground (0 V)c | - |
| 9 | Channel 1 Analog I/P (+)b | 18 | 18 | 0 V (Analog Rtn)b | 9 |
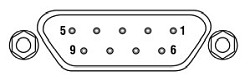
動作チャンネル用コネクタ
D型、メス
| Pin | Description | Pin | Description | Pin | Description |
|---|---|---|---|---|---|
| 1 | Encoder A +ve | 6 | Not Used | 11 | 0 V User |
| 2 | Encoder A -ve | 7 | Phase B - | 12 | Reserved for Future Use |
| 3 | Encoder B +ve | 8 | Phase A - | 13 | Reserved for Future Use |
| 4 | Encoder B -ve | 9 | CW Limit Switch | 14 | Phase B + |
| 5 | 5 V User | 10 | CCW Limit Switch | 15 | Phase A + |
ハンドセット
ミニDINメス型
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input)/RS232 | 4 | Supply Voltage for Handset 5 V |
| 2 | Ground | 5 | TX (Controller Output) |
| 3 | Ground | 6 | Ground |
ピエゾ制御モジュールMPZ601
ユーザI/Oコントローラ
D型、メス
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | DIG I/P 1a | 19 | 10 | DIG O/P 1a | 19 | 19 | Isolated Groundb | - |
| 2 | DIG I/P 2a | 19 | 11 | DIG O/P 2a | 19 | 20 | Ext Trigger I/P | 22 |
| 3 | DIG I/P 3a | 19 | 12 | DIG O/P 3a | 19 | 21 | Ext Trigger O/P | 22 |
| 4 | DIG I/P 4a | 19 | 13 | DIG O/P 4a | 19 | 22 | Ground | - |
| 5 | Channel 1 RS485 (+) | - | 14 | Channel 2 RS485 (+) | - | 23 | 5 V User O/P (Isolated) | - |
| 6 | Channel 1 RS485 (-) | - | 15 | Channel 2 RS485 (+) | - | 24 | Not Used | - |
| 7 | Not Used | - | 16 | Not Used | - | 25 | Analog or Potentiometer Ground | - |
| 8 | Channel 2 10 V O/Pc | 25 | 17 | Potentiometer Wiper Ch 2 | - | 26 | Potentiometer Reference | 25 |
| 9 | Channel 1 10 V O/Pc | 25 | 18 | Potentiometer Wiper Ch 2 | - |
ピエゾコントローラ
D型、メス
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | Wheatstone Bridge Excitation | 4 or 6 | 4 | DC(+) or Equipment Groundc | - | 7 | DC(-) or Actuator ID Signalb,c | 4 or 6 |
| 2 | +15 Va | 4 or 6 | 5 | Feedback Signal In | 4 or 6 | 8 | RS485 (-) | 9 |
| 3 | -15 Va | 4 or 6 | 6 | Equiptment Ground | - | 9 | RS485 (+) | 8 |
Ext In (+)およびExt In (-)
BNCメス型
HV Out
SMC

0~75 V、0~250 mA。ピエゾアクチュエータに対する駆動信号を出力します。
自動アライメントモジュールNanoTrak®MNA601/IR
ユーザI/Oコントローラ
D型、メス
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | DIG I/P 1a | 19 | 10 | DIG O/P 1a | 19 | 19 | Isolated Groundb | - |
| 2 | DIG I/P 2a | 19 | 11 | DIG O/P 2a | 19 | 20 | Ext Trigger I/P | 22 |
| 3 | DIG I/P 3a | 19 | 12 | DIG O/P 3a | 19 | 21 | Ext Trigger O/P | 22 |
| 4 | DIG I/P 4a | 19 | 13 | DIG O/P 4a | 19 | 22 | Ground | - |
| 5 | Channel 1 RS485 (+) | - | 14 | Channel 2 RS485 (+) | - | 23 | 5 V User O/P (Isolated) | - |
| 6 | Channel 1 RS485 (-) | - | 15 | Channel 2 RS485 (+) | - | 24 | Not Used | - |
| 7 | Not Used | - | 16 | Not Used | - | 25 | Analog Ground | - |
| 8 | Channel 2 10 V O/Pc | 25 | 17 | External Analog I/P CH2 0 - 10 V | 25 | 26 | Signal Power Outd | 25 |
| 9 | Channel 1 10 V O/Pc | 25 | 18 | External Analog I/P CH1 0 - 10 V | 25 |
ピエゾコントローラ
D型、メス
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | Wheatstone Bridge Excitation | 4 or 6 | 4 | DC(+) or Equipment Grounda | - | 7 | DC(-) or Actuator ID Signala,b | 4 or 6 |
| 2 | +15 Vc | 4 or 6 | 5 | Feedback Signal In | 4 or 6 | 8 | RS485 (-) | 9 |
| 3 | -15 Vc | 4 or 6 | 6 | Equiptment Ground | - | 9 | RS485 (+) | 8 |
LV Out
BNC Female
0~+10 V。ここからの出力は、HV OUTに反映され、10 VがHV出力端子の75Vに対応します。また、オシロスコープに接続できるので、ピエゾアクチュエータの駆動信号がモニタできます。
HV Out
SMC
0~75 V、0~500 mA。ピエゾアクチュエータに対する駆動信号を出力します。
Signal In
BNC Female
0~10 Vで、抵抗値は100 kΩ。外部のパワーメータから光パワー信号を受信するために使用します。
ピエゾアクチュエータの帯域幅に関するチュートリアル
多くの高速用途では、ピエゾ素子の形状変化する速度を知ることが必須となります。 ピエゾコントローラとピエゾ積層の帯域幅は、下記の数値がわかることで、計算で求められるようになります。
- コントローラが供給可能な最大電流量。下記で例としてとりあげられているBPCシリーズのピエゾコントローラでは、この数値は0.5 Aです。
- ピエゾ素子の負荷容量。容量が大きいほどシステムは遅くなります。
- 信号振幅の最適値(V)。この振幅がピエゾ素子の伸長寸法を決定します。
- ドライバの最大帯域幅。この数値は駆動負荷に依存しません。
出力コンデンサを駆動する際には、帯電と放電にそれぞれ電流が必要です。 帯電電荷の変化dV/dtはスルーレートと呼ばれています。 静電容量が大きいほど、必要とされる電流量は大きくなります。
例えば100 µmのピエゾ積層において静電容量が20 µFで、最大電流量が0.5 AのBPCシリーズピエゾコントローラで駆動されるとき、スルーレートは下記の数式で求められます。

したがって電圧が瞬間的に0 V から75 Vに変化するとき、出力電圧が75 Vに達するには3 msかかります。
注記: これらの計算式においては、ドライバの最大帯域幅は計算によって得られる帯域幅よりもずっと大きな値であり、ドライバの帯域幅は制限要因とならないことを前提としています。 なおこれらの数式が、開ループシステムにしか適用できない点にご注意ください。 閉ループモードでは、フィードバックループの応答の遅延がさらに帯域幅を制限します。
正弦波信号
システムの帯域幅は、通常は所定の振幅の正弦信号に対するシステムの応答により規定します。 正弦信号のピーク振幅がA、ピーク‐ピーク電圧がVpp、そして周波数がfの条件で駆動されているピエゾ素子については、以下の数式が成立します。

右の図は、時間の経過とともに変化する電圧を表しています。 スルーレートの最大値、または電圧の最大の変化は、t = 2nπ, (n=0, 1, 2,...)が成立する時点となり、右図では点 aで示されています。

上記の数式から下記が導出できます。

それゆえに下記が成立します。
上記の例では最大電圧(75 V)での帯域幅は下記の値になることがわかります。
 .
.
ピエゾが小さく、静電容量が1/10になると、結果は10倍向上して約1060 Hzとなります。 また、積層が100 µmのままであっても、ピーク‐ピーク電圧が7.5 V(10% の最大振幅値)であれば、結果は同様に10倍向上して約1060 Hzとなります。
三角波信号
ピエゾアクチュエータが三角波で駆動される場合、最大電圧がVpeakで、最小電圧が 0の時、スルーレートは勾配もしくは下記に等しくなります。
![]() .
.
あるいはf = 1/Tであるので、下記が導出できます。

矩形波信号
ピエゾアクチュエータが矩形波で駆動される場合、最大電圧がVpeakで、最小電圧が 0の時、スルーレートが最小の立ち上がりと立ち下がりの数値を制限します。この条件では、信号の立ち上がりまたは立ち下がりの途中では、スルーレートは勾配に等しくなります。 trが最小立ち上がり時間であるとき、下記の数式が成り立ちます。
この式により、下記の数式が成立することもわかります。
 .
.
ピエゾの動作や理論についてはピエゾ素子のチュートリアルをご参照ください。
ソフトウェア
Kinesisバージョン1.14.52
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Figure 58A KinesisソフトウェアのGUI画面
当社のKinesis®ソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cube®など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
Kinesisソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内Kinesis駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
| Posted Comments: | |
| No Comments Posted |

 ズーム
ズーム- 最大6つの制御モジュール(別売りです)を取り付け可能
- カスタム用途に適した汎用性の高い統合制御
- 標準的な19インチキャビネットに取り付け可能な4U、19インチのプロファイル
モジュール型ラックシャーシは、一般的な19インチキャビネットに取り付け可能なカバー無しタイプ(MMR601)と、ベンチトップ型での使用向けのカバー付きタイプ(MMR602)でご用意しております。筐体には当社の4種類の制御モジュール(別売りです)を最大6つまで取り付けることができ、4U、19インチラックの筐体サイズで最大12チャンネルまでのモーションコントロールが可能です。

 ズーム
ズーム- 100 Wピークまでの2チャンネル3相ブラシレスDCサーボモータ用コントローラ
- 通信やプラグアンドプレイによるPC操作のためのUSBおよびAUX I/Oポート(MMR601またはMMR602筐体経由)
- インクリメンタル型エンコーダによる速度と位置の閉ループ制御
- モータ制御用I/Oポート(ジョグ、インターロック)
- Kinesisによるソフトウェア制御をサポート
- Kinesisが新たな機能をサポート
- 高速位置入出力トリガ
- 動作の同期
- 動的PID設定
コントローラーモジュールMBD602は、モーションコントロール19インチラックシステムMMR601またはMMR602とご使用いただけるように設計された2チャンネル、高分解能のブラシレスDCモータードライバです。当社の100 W以下の3相ブラシレスDCサーボモータ製品の駆動用に適しています(エンコーダーフィードバック有り、または無し)。当社の堅牢なKinesisソフトウェアパッケージを備えた高速入出力トリガにより、複雑な制御システムの汎用的な構築要素としてご使用いただけ、さまざまな用途に合わせてカスタマイズ可能です。
最大6つのコントローラーモジュールMBD602をモジュールラックシステム(上記参照)に装備できるため、大規模な多軸モーションコントロール用途向けに拡張性の高いモーションコントロールをサポートします。MMR601またはMMR602ラック筐体内では、多軸モーションコントロール用途の場合、標準的なUSBハブを介して複数のモジュールを1台のPCに接続できます。使いやすいKinesisソフトウェアと組み合わせることにより、使用前の設定が短時間で行え、すぐに稼働させることができます。例えばこのソフトウェアには、当社のステージおよびアクチュエータ製品用に、すべての関連動作パラメータが自動設定されます。.NET プログラミング環境を使用すれば、より高度なカスタム仕様のモーションコントロールやシーケンスも可能となります。詳細は、「Kinesisソフトウェア」と「Kinesisチュートリアル」タブをご参照ください。
トリガ機能
コントローラMBD602には、入出力位置トリガ機能が備わっています。102 µs未満の遅延時間で、ライブ位置トリガを送信する間隔を定義できるため、ライブデータのキャプチャまたはフィードバック用にエンコーダーレベルに近いトリガ位置(100~200 nmまで)を設定できます。位置トリガーエンジンは走査中に数千パルスを送信し、幅広い用途に合わせて高度にカスタマイズ可能なイメージマッピング用のさまざまなプラットフォームを提供します。Kinesisソフトウェアを使用することで、出力トリガの開始位置、パルス間隔、パルス数、パルス幅を規定できます。例えば、5 mm x 5 mmの試料をイメージングする場合、試料のエッジ部分を定義し、試料全体をシステムでラスタースキャンして任意の間隔で画像を取得できます。システムの視野に合わせたトリガ間隔により、画像をデジタル的に統合して試料全体の高倍率ビューを効率的に再構成できます。
ジョイスティック
ステージの位置決めを手動で直感的に行うことができる2軸ジョイスティック(型番MJC2)も別途ご用意しております。ジョイスティックの使用についての詳細は、赤いアイコン (![]() )からご覧いただけるマニュアルでご確認いただけます。
)からご覧いただけるマニュアルでご確認いただけます。
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに附属しており、コントローラには附属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。

 ズーム
ズーム- 2つのステッピングモータ駆動チャンネル
- 高分解能マイクロステップ制御(微細位置決め用途向け)
- 安定性があり予測可能な低速操作(速度に敏感な用途)
- 48 V/50 W(ピーク値)までの2相双極ステッピングモータをサポート
- 閉ループ位置決め用の差動エンコーダーフィードバック(QEP入力)
- 多軸構築への拡張用USBプラグ・アンド・プレイ
- モータ制御用I/Oポート(ジョグ、インターロック)
- 当社のほかのモーションコントローラとの完全統合(統合システム開発)
- Kinesis制御用ソフトウェア一式を使用可能
モジュールMST602は、モーションコントロール19インチラックシステムMMR601またはMMR602とご使用いただけるように設計された2チャンネル、高分解能、ラックマウント型のステッピングモータードライバです。50 W以下で2相双極ステッピングモータを駆動するように設計され(エンコーダーフィードバック有り、または無し)、当社提供のすべてのステッピングモータ付きナノポジショニングアクチュエータやステージに対応します。また、多様なパワーとステップサイズの2相双極モータにも対応可能です。
ラック筺体MMR601またはMMR602をご使用の場合、USB接続によるPC操作が可能となります。筐体にはモジュールを最大で6つまで搭載可能で、多軸モーションコントロール用途の場合、標準的なUSBハブを介して複数のモジュールを1台のパソコンへ接続することが可能です。使いやすいKinesisソフトウェアと組み合わせることにより、使用前の設定が短時間で行え、すぐに稼働させることができます。広範なプログラミング環境を使用すれば、より高度なカスタム仕様のモーションコントロールやシーケンスも可能となります。詳しくは「Kinesisソフトウェア」および「Kinesisチュートリアル」タブをご参照ください。
ジョイスティックステージの位置決めを手動で直感的に行うことができる2軸ジョイスティック(型番MJC2)も別途ご用意しております。ジョイスティックの使用についての詳細は、赤いアイコン (![]() )からご覧いただけるマニュアルでご確認いただけます。
)からご覧いただけるマニュアルでご確認いただけます。
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに附属しており、コントローラには附属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。

 ズーム
ズーム- 2つのピエゾ駆動チャンネル
- 静かで高分解能の位置決め制御(高精度の位置決め用途向け)
- ランプ電圧/波形発生機能(走査用)
- 高帯域幅(10 kHz)のピエゾ位置決め
- 当社の識別機能付きピエゾアクチュエータ用の自動設定機能あり
- ユーザ制御のデジタルおよびアナログI/Oポート
- 当社のほかのモーションコントローラとの完全統合(統合システム開発)
- Kinesis制御用ソフトウェア一式を使用可能
ピエゾアクチュエーターモジュールMPZ601は、2チャンネルの高出力(75 V、500 mA)ピエゾコントローラです。当社のすべての開ループ・閉ループのピエゾ駆動ナノポジショニングアクチュエータ、ステージを駆動できるよう設計されています。各チャンネルには歪みゲージフィードバック回路が付いており、当社のアクチュエータで動作させるとナノメートル領域での閉ループ位置決めを行うことができます。さらに、このユニットはフレキシブルなソフトウェア設定によって細かい設定が可能なので、他社製の様々なピエゾ素子の駆動にも適しています。波形発生機能とトリガ出力の組み合わせにより、特にピエゾ走査用途に適します。
こちらのモジュールは最新の高速DSP(デジタルシグナルプロセッサ)と低ノイズアナログ回路を搭載しており、特にモーションコントロール19インチラックシステムMMR601またはMMR602内に適合するように設計されています。このラックシステムには複数のピエゾモジュールMPZ601を取り付けが可能なため(ラック当たり最大12チャンネルの動作が可能)、多軸でナノメートルレベルのモーションコントロールが要求される、大規模で精密なアライメント用として設計されています。
ラック筐体MMR601、MMR602は、USB接続によってPCで簡単に操作でき、標準的なUSBハブ技術により複数のユニットを1台のPCに接続することができます。使いやすいKinesisソフトウェアと組み合わせることにより、使用前の設定が短時間で行え、すぐに稼働させることができます。広範なプログラミング環境を使用すれば、より高度なカスタム仕様のモーションコントロールやシーケンスも可能となります。詳しくは「Kinesisソフトウェア」および「Kinesisチュートリアル」タブをご参照ください。
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに附属しており、コントローラには附属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。

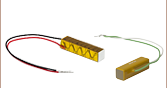
 ズーム
ズーム Click to Enlarge
Click to Enlarge赤外域波長用ディテクタNTA007の背面
- 高度な光探索アルゴリズムを用いたアクティブアライメントシステム
- トラッキング機能による適切な光透過効率の恒久的な維持
- アライメントの安定性を長期にわたって維持するためのLatchモード
- MNA601/IRモジュールは2軸制御が可能
- 2つのピエゾコントローラ出力閉ループフィードバック
- 赤外域(IR)用InGaAsディテクタ(型番NTA007)およびSMBコネクタが付属
- 可視域(VIS)用Siディテクターヘッド(型番NTA009)を別売りにてご用意
- サードパーティのカスタム用途向けソフトウェアGUI制御セット
モジュール式のNanoTrak自動アライメントコントローラは、ファイバ同士または光ファイバ光学系と自由空間光学系の結合効率が最大限に得られるような自動制御システム用に設計されています。ピエゾステージによりファイバ先端を円形の走査パターンに動かすと、コントローラはピーク出力方向を決定するために勾配探索を実施し、最大のスループットを得られる位置にファイバを配置させます。2つの高電圧出力チャンネルによりピエゾアクチュエータに電圧信号が供給されるため、外部のピエゾドライバを追加する必要はありません。このファイバーアライメントコントローラは、当社の3軸NanoMaxや6軸NanoMaxステージをはじめとするピエゾ駆動の多軸ステージを組み合わせることにより、自動アライメントシステムとなります。
ラックシステムMMR601またはMMR602と使用する場合、USB接続によるプラグアンドプレイに対応しており、容易にPCによる操作が可能になります。PCで使用するKinesis®ソフトウェアは新しい.NETコントロールが特長で、最新のC、C#、LabVIEW™、あるいはその他の.NETに対応する言語を使用してカスタムプログラムを作成するようなサードパーティの開発者も利用することができます。詳細は、「Kinesisソフトウェア
あるデバイス(例:ファイバ)から他のデバイスに光を結合するために、最初に信号が検出されるまで、デバイスを移動しての検索します。NanoTrakのサポートソフトウェア は、この最初の光検出用に一連の検索アルゴリズムを提供します。NanoTrakは主に光ファイバや光集積装置のアライメントに使われていますが、導波路の特性解析、アクティブおよびパッシブデバイスのファイバーピグテール付け、その他多くのR&D用途のような手間のかかるアライメント作業の自動化にも適しています。
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに附属しており、コントローラには附属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。
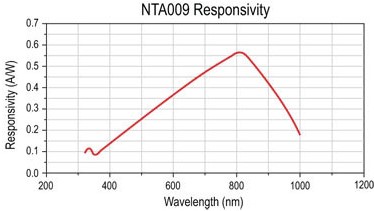
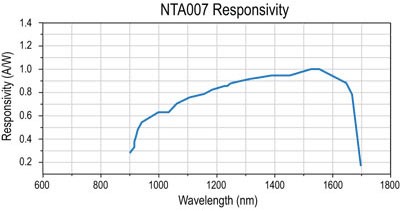
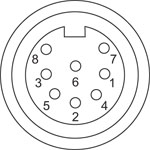
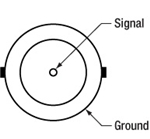
ディテクターヘッド
NanoTrakモジュールには、赤外(IR)波長(900~1700 nm)用のInGaAsディテクタ(型番NTA007)と、外部ディテクターヘッドとご使用いただくPINダイオードSMB入力が付属しています。可視(VIS)域波長(320~1100 nm)用のSiディテクタ(型番NTA009)は下記にて別途ご購入いただけます。 どちらのディテクターヘッドも背面にFC/PC光ファイバ入力ポートと、ジャックを介してコントローラと接続するインターフェイスが付いています(右写真参照)。各ディテクタの仕様および波長に対する感度は下の表をご覧ください。
| Item # | Wavelength Range | Active Area | Fiber Input | Dark Current | Junction Capacitance |
|---|---|---|---|---|---|
| NTA009 | 320 - 1000 nm | Ø0.8 mm | FC/PC | 0.01 nA (Typ.) @ 10 V | 3.00 pF (Typ.) @ 10 V |
| NTA007 | 900 - 1700 nm | Ø0.12 mm | FC/PC | 0.05 nA (Typ.) @ 5 V | 2.0 pF (Typ.) @ 5 V |