 Products Home
Products HomeブラシレスDCモーターコントローラーモジュール
- Two Motor Drive Channels
- Supports 3-Phase, Brushless DC Servo Motors (5.2 A Peak Total Output) with Encoder Feedback
- Seamless Operation with Thorlabs and 3rd Party Motors
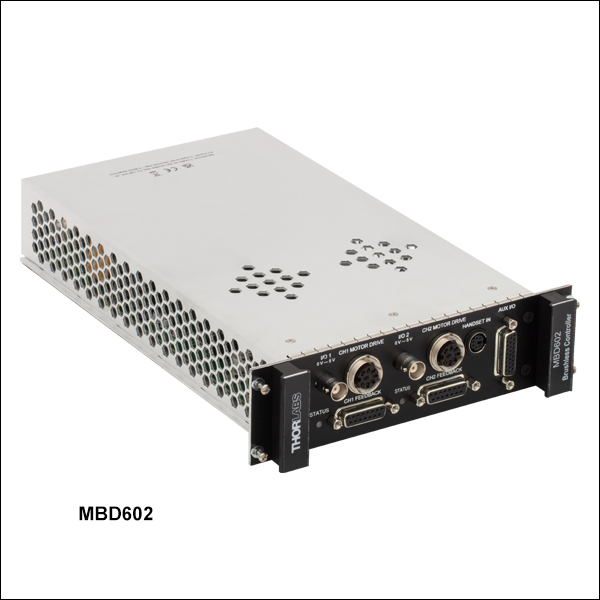
MBD602
Kinesis Software GUI









Please Wait
| Rack System Modules |
|---|
| 2-Channel Piezo Controller Module |
| 2-Channel Stepper Motor Controller Module |
| 2-Channel NanoTrak® Auto-Alignment Module |
| 2-Channel Brushless DC Motor Controller Module |
| USB Motion Control 19" Rack Chassis |
| 当社のすべてのラックシステムモジュールはラックマウントシャーシMMR601またはMMR602と共にお使いください。ラックマウントシャーシから外した状態のモジュールの個別の操作はできません。 |
特長
- 2チャンネルのブラシレスDCモータドライバ
- 当社の100 Wピークまでの3相DCブラシレスモータ製品に対応
- インクリメンタル型エンコーダによる速度と位置の閉ループ制御
- モーションコントロール用19インチラックマウントシャーシMMR601またはMMR602が別途必要
- ラックマウントシャーシを使用して多軸構築への拡張が可能なUSBプラグ・アンド・プレイ
- モータ制御用I/Oポート(ジョグ、インターロック)
- Kinesis制御用ソフトウェア一式が付属
- Kinesisがサポートする新たな機能
- 高速位置入出力トリガ
- 動作の同期
- 動的PID設定
- 直感的操作が可能なグラフィック制御パネル
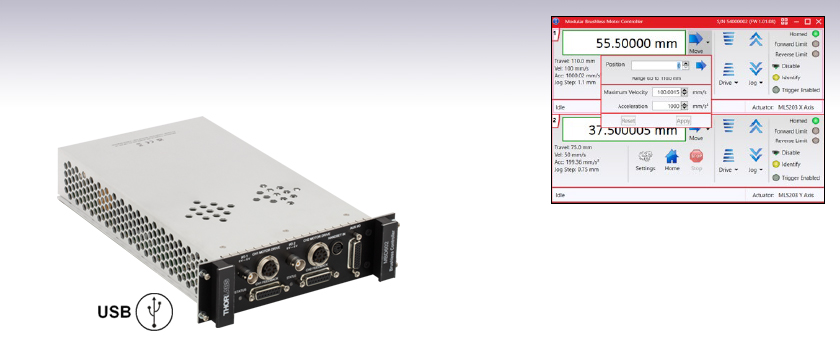
コントローラーモジュールMBD602は、モーションコントロール用の19インチラックマウントシャーシMMR601またはMMR602とご使用いただけるように設計された2チャンネル、高分解能のブラシレスDCモータードライバです。当社の100 W以下の3相ブラシレスDCサーボモータ製品の駆動用に適しています(エンコーダーフィードバック有り、または無し)。MBD602は、当社のロバストなKinesisソフトウェアパッケージを備えた高速入出力トリガにより、複雑な制御システムの汎用的な構築要素としてご使用いただけ、さまざまな用途に合わせてカスタマイズ可能です。
最大6つのモジュールMBD602をラックマウントシャーシに装備できるため、大規模な多軸モーションコントロール用途向けに拡張性の高いモーションコントロールをサポートします。スタンドアローン型のコントローラにつきましてはTable 1.1をご参照ください。ラックマウントシャーシMMR601またはMMR602内で、USB接続によるPC操作が可能となります。多軸モーションコントロール用途の場合、標準的なUSBハブを介して複数のモジュールを1台のPCへ接続することが可能です。使いやすいKinesisソフトウェアと組み合わせることにより、短時間で使用前の設定が可能です。例えばこのソフトウェアには、当社のステージおよびアクチュエータ製品用に、すべての関連動作パラメータが自動設定されています。.NET プログラミング環境を使用すれば、より高度なカスタム仕様のモーションコントロールやシーケンスも可能となります。詳細は、「Kinesisソフトウェア」および「Kinesisチュートリアル」タブをご参照ください。
トリガ機能
コントローラMBD602には、入出力位置トリガ機能が備わっています。102 µs未満の遅延時間で、ライブ位置トリガを送信する間隔をユーザ設定できるため、ライブデータのキャプチャまたはフィードバック用にエンコーダーレベルに近いトリガ位置(100~200 nmまで)を設定できます。位置トリガーエンジンは走査中に数千パルスを送信し、幅広い用途に合わせて高度にカスタマイズ可能なイメージマッピング用のさまざまなプラットフォームを提供します。Kinesisソフトウェアを使用することで、出力トリガの開始位置、パルス間隔、パルス数、パルス幅を規定できます。例えば、5 mm x 5 mmの試料をイメージングする場合、試料のエッジ部分を定義し、試料全体をシステムでラスタースキャンして任意の間隔で画像を取得できます。システムの視野に合わせたトリガ間隔により、画像をデジタル的に統合して試料全体の高倍率ビューを効率的に再構成できます。
ジョイスティック
ステージの位置決めを手動で直感的に行うことができる2軸ジョイスティック(型番MJC2)も下記にて別途ご用意しております。ジョイスティックの使用についての詳細は、赤いアイコン(![]() )からご覧いただけるマニュアルでご確認いただけます。
)からご覧いただけるマニュアルでご確認いただけます。
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに附属しており、コントローラには附属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。
| Table 1.1 Other Brushless DC Motor Controllers | |||
|---|---|---|---|
| K-Cube® Single-Channel Controller | 1-, 2-, and 3-Channel Benchtop Controller | 19" Rack-Mounted Controller | Modular 2-Channel Rack System Module |
| Item # | MBD602 |
|---|---|
| Number of Channels | 2 |
| Motor Drive Connector | 8-Pin DIN-Type, Female (Motor Phase Outputs, Stage ID Input) |
| Feedback Connector | 15-Pin D-Type Female |
| Brushless Continuous Current Output | 2.5 A per Channel (5.0 A Max All-Channel Output) |
| Brushless Peak Current Output | 4.0 A per Channel (5.2 A Max All-Channel Output) |
| Pulse-Width Modulation Frequency | 20 kHz |
| Operating Modes | Position and Velocity |
| Control Algorithm | 16-Bit Digital PID Servo Loop with Velocity and Acceleration Feed Forward |
| Velocity Profile | Trapezoidal |
| Position Count | 32 Bit |
| Position Feedback | Incremental Encoder |
| Encoder Bandwidth | 2.5 MHz (10 M Counts/sec) |
| Encoder Supply | 5 V |
| AUX Control Connector | 26-Way High Density D-Type Female (User Digital IO, 5 V O/P) |
| Input Power Requirements | Power: 250 VA Voltage: 100 to 240 VAC Frequency: 47 to 63 Hz |
| Dimensions | 187 mm x 286.6 mm x 50.4 mm (7.36" x 11.28" x 1.98") |
| Weight | 0.9 kg (1.98 lbs) |
| Compatible Motor Specs | 3-Phase DC Brushless Motors with Peak Power: 100 W, Coil Resistance: 0.1 to 100 Ω, Coil Inductance (Nominal): 1 to 100 mH, and Rated Phase Current (Nominal): 100 mA to 5 A |
| Item # | MMR601 & MMR602 |
|---|---|
| Enclosure | Standard 19" Rack, 4U High |
| Module Bays | 6 Modular Slots, Back Panel Access |
| Communications | USB 1.1 Interface |
| Power Input | |
| Voltage | 85 - 264 VAC |
| Frequency | 47 - 63 Hz |
| Power | 800 W |
| Fuse | 15 A |
| Dimensions (W x D x H): | 480 mm x 448 mm x 183 mm (19.0" x 17.6" x 7.0") |
| Weight | 16 kg (35.2 lbs) |
モータードライバ
8ピン、DIN型、メス
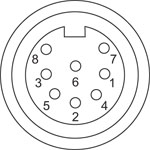
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase B | 5 | Stage ID |
| 2 | GND | 6 | Enable |
| 3a | Motor Phase D | 7 | Motor Phase C |
| 4 | Motor Phase A | 8a | +5 V |
フィードバック
15ピン、D型、メス
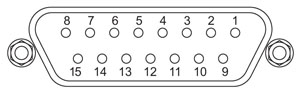
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Not Connected | 11 | Limit Switch - |
| 4 | Index - | 12 | Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7a | 5 V | 15 | Not Connected |
| 8a | 5 V |
ハンドセット
ミニDINメス型
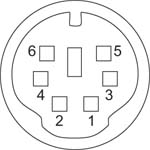
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input) | 4b | Supply Voltage for Handset 5 V |
| 2a | Ground | 5 | TX (Controller Output) |
| 3a | Ground | 6a | Ground |
AUX I/O
26方向高密度、D型、メス
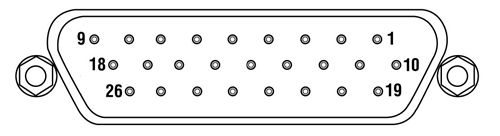
| Pin | Description | Function | Pin | Description | Function | Pin | Description | Function |
|---|---|---|---|---|---|---|---|---|
| 1a | Digital I/P 3 | - | 10a | Digital O/P 3 | - | 19c | Ground | - |
| 2a | Digital I/P 2 | - | 11a | Digital O/P 2 | - | 20e | Digital O/P 2+ | Motor #1 Encoder B+ |
| 3a | Digital I/P 1 | - | 12a | Digital O/P 1 | - | 21e | Digital O/P 2- | Motor #1 Encoder B- |
| 4a | Digital I/P 0 | - | 13a | Digital O/P 0 | - | 22e | Ground | - |
| 5e | Digital O/P 6- | Motor #2 Encoder A- | 14e | Digital O/P 4+ | Motor #2 Encoder IX+ | 23d | 5 V | - |
| 6e | Digital O/P 6+ | Motor #2 Encoder A+ | 15e | Digital O/P 4- | Motor #2 Encoder IX- | 24e | Digital O/P 1+ | Motor #1 Encoder IX+ |
| 7e | Digital O/P 5+ | Motor #2 Encoder B+ | 16e | Digital O/P 3- | Motor #1 Encoder A- | 25e | Digital O/P 1- | Motor #1 Encoder IX- |
| 8e | Digital O/P 5- | Motor #2 Encoder B- | 17e | Digital O/P 3+ | Motor #1 Encoder A+ | 26c | Ground | - |
| 9b | RS-232 RX | - | 18b | RS-232 TX | - |
ソフトウェア
Kinesisバージョン1.14.52
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Figure 58A KinesisソフトウェアのGUI画面
当社のKinesis®ソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cube®など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
Kinesisソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内Kinesis駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
| Posted Comments: | |
| No Comments Posted |

 ズーム
ズーム Click to Enlarge
Click to EnlargeFigure G1.2 モーションコントロール用19インチラックMMR601の背面。コントローラーモジュールが6つ取り付けられています。
 Click to Enlarge
Click to EnlargeFigure G1.1 モーションコントロール用19インチラックシャーシMMR601の前面
- 2チャンネル3相ブラシレスDCサーボモータ用コントローラ
- モーションコントロール用19インチラックマウントシャーシMMR601またはMMR602が別途必要
- 通信、およびプラグアンドプレイによるPC操作のためのUSBおよびAUX I/Oポート
- Kinesis®によるソフトウェア制御をサポート
ブラシレスDCモーターコントローラMBD602は、ラックシステムMMR601またはMMR602と使用して、最大100 Wまでの3相ブラシレスDCサーボモータを駆動できます。 入出力トリガにより、ほかのコントローラやデバイスとの柔軟な統合および動機が可能です。
モジュール型ラックシャーシは、一般的な19インチキャビネットに取り付け可能なカバー無しタイプ(MMR601)と、ベンチトップ型での使用向けのカバー付きタイプ(MMR602)でご用意しております。各ラックシャーシには最大6つまでのコントローラーモジュールを設置できます。

 ズーム
ズーム- USB HIDプロトコルを使用した信頼性の高いジョイスティック
- 2軸コントローラ
- 高速動作または高精度動作の2種類のモード
- 感度調整のための速度ダイヤル
- リモート手動操作が可能
- PCを用いて再プログラム可能
- 人間工学に基づいた設計
ジョイスティックMJC2は顕微鏡ユーザ向けに設計されており、ステージの位置決めを手動で直感的に行うことができます。このジョイスティックはXY制御用に2軸のジョイスティックノブが付いています。また、ジョイスティックには高速動作と高精度動作を切り替えるプッシュボタンと、速度制御を微調整するための速度ダイヤルも付いています。ほとんどの用途では、コントローラに保存されたデフォルトのパラメータ設定のままですぐにお使いいただくことができ、それ以上の設定は不要です。そのような使い方をするときはホストPCに接続する必要もなく、真のリモート操作が可能です。PCを使用してパラメータを再設定したとき、それをペアリングしたコントローラにも保存できます。そのため、PCとの接続を外してもリモート操作を継続できます。
ジョイスティックMJC2は、当社のベンチトップ型ブラシレスDCモーターコントローラ、ラックマウント型ブラシレスDCサーボコントローラ、ラックマウント型ブラシレスDCサーボコントローラーモジュール、ステッピングモーター用コントローラに対応します。これらのコントローラやUSB HIDクラスを使うセットアップと組み合わせて使用できるように、ジョイスティックにはMini-DINポートとUSB Type-Cポートの両方が付いています。また、6ピンMini-DINプラグ-プラグケーブルとUSB 3.1 Type-A - Type-Cケーブルの2本のケーブルが付属します。USB HIDを使用したジョイスティックの設定やセットアップの詳細は、型番横の赤いアイコン( )をクリックしてマニュアルをご覧ください。
)をクリックしてマニュアルをご覧ください。