 Products Home
Products Home電動式精密回転ステージ、DCサーボモーター付き
- Continuous 360° Motorized Rotation
- Rotational Velocity: 25 Degree/Second
- Tapped Platform for Mounting Prisms or Other Optics
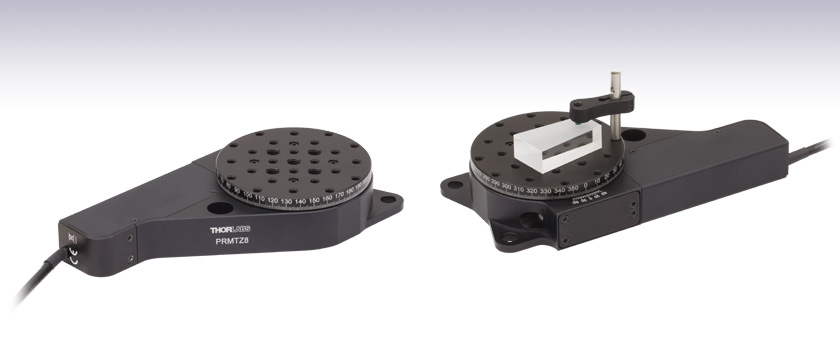
PRMTZ8
Motorized Continuous
Rotation Stage
Application Idea
PRMTZ8 with PM3 Clamping Arm
and Pellin Broca Prism










Please Wait
| Key Specificationsa | |
|---|---|
| Platform Size | Ø66.2 mm (2.61") |
| Platform Mounting Holes | Eight 6-32 (M4) Sixteen 8-32 (M4) Five 1/4"-20 (M6) |
| Bidirectional Repeatability | ±0.1° |
| Backlash | ±0.3° |
| Max Rotation Velocity | 25 deg/s |
| Horizontal On-Axis Load Capacityb | 15 N (1.5 kg, 3.4 lbs) |
| Repeatable Incremental Motion (Min) | 0.04° |
| Percentage Accuracy | 0.1% |
| Home Location Accuracy | ±0.2° |
| Range | 360° Continuous |
特長
- 回転速度:毎秒25°
- クランプアーム(下記参照)やその他のオプトメカニクス部品用取付け穴
- メインダイヤルに1°単位の目盛
- 高さが25 mmのコンパクトな設計
- 精密に0°(±0.2°以内)の位置に戻るホームリミットスイッチ
- 推奨ドライバ:DCサーボコントローラKDC101
PRMTZ8/MはコンパクトなDCサーボモータ駆動による360°回転ステージで、そのプラットフォームにはタップ穴が付いています。プラットフォームの角度測定には、回転プレートに印されている1°単位の目盛と併せてバーニヤ目盛(分解能5 arcmin)も使用可能です。こちらの回転ステージにはホームリミットスイッチも付いているため、回転位置を自動的にゼロ点に移動でき、従って角度の絶対位置の設定ができます。このリミットスイッチは、複数回の360°回転を連続的に行えるように設計されています。
別売りのDCサーボコントローラKDC101を使用すると、ソフトウェアインターフェイスを介してスムーズで連続的に動作させることが可能です。ステージとコントローラ、電源KPS101*がセットになった製品KPRMTE/Mもございます。
PRMTZ8/Mには長さ430 mmのケーブルが付属します。長さ2.5 mのエクステンションケーブル(PAA632)を別途ご購入いただくこともできます。
*こちらの電源は旧製品のため単体ではご購入いただけません。交換が必要な場合にはKPS201がご使用いただけます。
| Motor Specifications | |
|---|---|
| Motor Type | DC Servo |
| Nominal Voltage | 6 V |
| No Load Speed | 6560 rpm |
| No Load Current | 7.43 mA |
| Nominal Speed | 1050 rpm |
| Nominal Torque (Maximum Continuous Torque) | 1.26 mN•m |
| Nominal Current (Maximum Continuous Current) | 0.156 A |
| Stall Torque | 1.54 mN•m |
| Starting Current | 0.184 A |
| Maximum Efficiency | 65% |
| Terminal Resistance | 32.7 Ω |
| Terminal Inductance | 0.607 mH |
| Torque Constant | 8.38 mN•m/A |
| Speed Constant | 1140 rpm/V |
| Speed / Torque Gradient | 4450 rpm/mN•m |
| Mechanical Time Constant | 13.9 ms |
| Rotor Inertia | 0.298 g•cm2 |
| Stage Specifications | |
|---|---|
| Translation and Motion Parameters | |
| Travel Range | 360° Continuous |
| Bidirectional Repeatabilitya | ±0.1° |
| Backlashb | ±0.3° |
| Max Rotation Velocity | 25 deg/s |
| Calculated Resolution | 2 arcsec (0.0005°) |
| Horizontal On-Axis Load Capacityc | 15 N (1.5 kg, 3.4 lbs) |
| Min Repeatable Incremental Motiond | 0.04° |
| Percentage Accuracy | 0.1% |
| Home Location Accuracy | ±0.2° |
| Wobble | 200 µrad |
| Physical | |
| Platform Size | Ø66.2 mm (2.61") |
| Platform Mounting Holes | Eight 6-32 (M4) Sixteen 8-32 (M4) Five 1/4"-20 (M6) |
| Dimensions | 137.4 mm x 73.3 mm x 25 mm (5.41" x 2.88" x 0.98") |
| Weight | 0.38 kg (0.84 lbs) |
| Cable Length | 430 mm (16.93") |
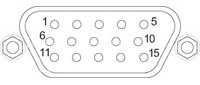
モーターコネクターピン配列

PRMTZ8/Mには長さ430 mmのケーブルが付属します。長さ2.5 mのエクステンションケーブル(PAA632)を別途ご購入いただくこともできます。
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Ground/Return | 9 | Ident Resistora |
| 2 | Reserved For Future Use | 10 | Vcc/Ident Resistor |
| 3 | Limit Switch | 11 | Encoder Channel B |
| 4 | Reserved For Future Use | 12 | Reserved For Future Use |
| 5 | Motor (+) | 13 | Encoder Channel A |
| 6 | Reserved For Future Use | 14 | Ident EEPROM |
| 7 | Motor (-) | 15 | Ident EEPROM |
| 8 | Reserved For Future Use | - | - |
Dタイプオス型
ソフトウェア
Kinesisバージョン1.14.52
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Figure 58A KinesisソフトウェアのGUI画面
当社のKinesis®ソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cube®など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
バーニヤ目盛の読み方:主目盛が直線状の場合
バーニヤ目盛は、均等に分割された標準的な目盛(当社の回転マウント、ゴニオステージ、移動マウントに付いている目盛など)に対して、精密さを向上させるために一般的に使用されている目盛です。バーニヤ目盛は多くの精密測定器に使用されていますが、中でも良く知られているのはノギスやマイクロメータです。バーニヤ目盛を使用するときは、主目盛とバーニヤ目盛の2つの目盛を並べて使用します。バーニヤ目盛は、主目盛のN - 1目盛に対してN目盛が対応するように刻まれているため、その間隔は主目盛よりも若干狭くなります。そのため、主目盛の刻線とバーニヤ目盛の刻線とは一致しません。バーニヤ目盛の刻線で主目盛の刻線と最も良く一致するのは通常1本だけですが、それがバーニヤ目盛を読む要所になります。
図1~3では、直線状のバーニヤ目盛の仕組みについて3つの例をあげて説明しています。これらの図では、左側が主目盛で右側の小さい目盛がバーニヤ目盛です。バーニヤ目盛を読むときは、まず主目盛で大まかな数値を読み取り、次にバーニヤ目盛で精密な数値を読み取ります。この仕組みで、標準的なルーラやマイクロメータが精密な測定器になります。
バーニヤ目盛の0は「ポインタ」(図1~5で赤い矢印で表示)で、主目盛での読取値を示します。図1では、ポインタは主目盛の75.6の刻線と一致しています。これ以外で主目盛の刻線と一致しているバーニヤ目盛の刻線は、10だけであることに注目してください。ポインタが主目盛の75.6と一致しているので、図1から読み取れる値は75.60になります(どのような単位での測定でも同じです)。
これがバーニヤ目盛の読み取り方の基本です。バーニヤ目盛を用いると、簡単に測定器の精度を向上させることができます。図2で更に詳しくご説明します。ここではポインタは主目盛の刻線とは一致せず、75.6よりわずかに上側ですが75.7よりも下側にあります。この場合の大まかな読取値は75.6になります。主目盛と最も良く一致するバーニヤ目盛は5で、青い矢印で示されています。バーニヤ目盛は精密に読み取れる最小桁を示し、図2では5が主目盛と一致しているので、精密な測定値は75.65になります。
バーニヤ目盛は主目盛よりも10%小さくなっているので、バーニヤ目盛を主目盛の1/10だけ動かすと、バーニヤ目盛の次の刻線が一致します。ここで、測定値が1/10の精度を与えてくれるバーニヤ目盛の間にきてしまった場合はどうするのか、という疑問が生じます。図3ではこれについて説明しています。上述の通り、ポインタの刻線は75.6と75.7の間にあるので、大まかな読取値は75.6になります。よく見ると、バーニヤ目盛の7(青い矢印で表示)が主目盛とほぼ一致しているので、精密な測定値としては75.67になります。しかし、バーニヤ目盛の7は主目盛よりもわずかに上にあり、8(7のすぐ上)は主目盛よりもわずかに下にあります。このことから、図3の目盛は75.673 ± 0.002と読み取れます。この想定器では、読取誤差を約0.002とするのは適切です。
Click to Enlarge
図1:バーニヤ目盛の読み取り方の例。赤い矢印はポインタと呼ばれています。バーニヤ目盛の10が主目盛の1本と一致しているので、このバーニヤ目盛は75.60と読み取れます(どのような単位での測定でも同じです)。
Click to Enlarge
図2:赤い矢印はポインタを示し、青い矢印は主目盛と一致するバーニヤ目盛の刻線を示しています。この目盛では75.65と読み取れます。

Click to Enlarge
図3:赤い矢印はポインタを示し、青い矢印は主目盛と一致するバーニヤ目盛の刻線を示しています。これは75.67と読み取れますが、より精密には75.673 ± 0.002と読むことができます。
バーニヤ目盛の読み方:主目盛が回転式の場合
バーニヤ目盛は、主目盛とバーニヤ目盛が単位を共有していない回転式の目盛でも使用できます。図4と図5では、主目盛には度(°)を単位とする刻線があり、バーニヤ目盛には5 arcmin(60 arcmin = 1°)毎の刻線がある場合について、2つの例をあげて説明しています。これらの図では、上が主目盛を表し、下の小さい目盛がバーニヤ目盛を表します。
図4では、ポインタは主目盛の341°の刻線と一致しています。これ以外に主目盛と一致しているバーニヤ目盛は±60 arcminだけであることに注目してください。バーニヤ目盛の0が主目盛の341°と一致しているので、図4から読み取れる値は341.00°になります。
バーニヤ目盛の0が主目盛の2本の刻線の間にある場合は、2通りの読み取り方ができます。1つ目の方法では、ポインタの左側で主目盛と一致しているバーニヤ目盛の刻線を読み取り、その値(単位はarcmin)をポインタのすぐ右側にある主目盛の値から引きます。例として、図5ではバーニヤ目盛のポインタは342°と343°の間にあります。バーニヤ目盛の左側の青い矢印を使用して読むと、343° - 15 arcmin = 342.75°になります。2つ目の方法は、バーニヤ目盛のポインタの右側にある青い矢印から読み取った値を、主目盛のポインタより左側の小さな値に加える方法です。図5の右側の青い矢印を使用して読むと、342° + 45 arcmin = 342.75°になります。
このように、バーニヤ目盛を用いると標準的なスケール測定の精密さを向上させることができます。慣れるまでに少々時間がかかりますが、練習すれば非常に簡単に目盛を読めるようになります。順バーニヤ、逆バーニヤ*にかかわらず、すべてのバーニヤ目盛は同様の方法で読み取ることができます。
*逆バーニヤ目盛は目盛の間隔が主目盛よりも若干広く、主目盛のN + 1目盛に対してN目盛が対応するように刻まれています。

Click to Enlarge
図4: 主目盛の単位(度)とバーニヤ目盛の単位(arcmin)が異なる例。赤い矢印はポインタを示しています。この目盛では341.00°と読み取れます。
Click to Enlarge
図5:赤い矢印はポインタを示し、青い矢印はバーニヤ目盛で読み取れる精密な数値を示します。 この目盛では342.75°と読み取れます。
| Posted Comments: | |
Flavien Beffara
(posted 2024-10-04 15:02:39.647) I am trying to control a PRMTZ8/M with a KDC101 controller using Python. I used the code provided on GitHub titled "KDC101_Power_Meter_Insight_Code.py". The code compiles fine. Unfortunately, the stage does not rotate to the defined real angle value using JogMode like in the youtube video. I do not understand why it is moving slightly and stops. If I try to increase the value in "StepSize" to Decimal(30) it reaches an error. Could you please help me figure out what is the problem with the code ?
Thank you very much in advance.
Best regards. dnewnham
(posted 2024-10-10 10:24:52.0) Thank you for your inquiry I will reach out to you directly to discuss your issue. dnewnham
(posted 2024-10-10 10:24:52.0) Thank you for your inquiry I will reach out to you directly to discuss your issue. Benquan Li
(posted 2023-06-26 12:35:24.07) hello,
We're trying to design a machine using this part.
Could you please provide a solidwork model of 2020version?
My SW cannot open a future version of this model:
https://www.thorlabs.com/thorproduct.cfm?partnumber=PRMTZ8
thank you so much
Best,
Benquan Li
Atia Vision
Campbell CA fguzman
(posted 2023-06-28 04:06:54.0) Thanks for your enquiry. Unfortunately, it is not possible to create older versions of files, nor is it possible to roll back a version of Solidworks. We post a selection of files which can be used by almost anyone which should be appropriate in situations like this. The HTML files (eDrawings) are for customers who may not have any access to software which can open 3D model files. Step files, can be opened in older versions of Solidworks but may have graphical issues if the parts are too complex for the older SW version. I will contact you to further discuss this. user
(posted 2022-10-21 15:47:49.6) How slowly can I rotate the stage in degrees/sec with the kinesis software? jgreschler
(posted 2022-10-28 03:46:05.0) Thank you for reaching out to Thorlabs. Unfortunately we do not have a measured spec for this value currently. Additional specifications and data can be requested by emailing techsupport@thorlabs.com. Michael McGivney
(posted 2022-08-10 10:36:18.407) Hi,
Can you please provide additional details about the maximum loads the PRMTZ8 rotation stage can handle? I am currently designing a test set up and want to be sure the stage can handle the weight I need to place on top of it.
Thank you,
Michael McGivney cwright
(posted 2022-08-12 04:11:50.0) Response from Charles at Thorlabs: Thank you for your query. The load capacity of this stage is specified as 1.5 kg, which assumes the load is centred on the top plate and the stage is flat on the table. A member of technical support will reach out to you to discuss your application and position of the load. Sudhan Bhadade
(posted 2019-08-08 06:51:39.933) Hello, I am using the KDC101 cube with .NET in Labview. I have established a connection with the Kinesis interface using the .dll files. When I attempt to connect to the cube, I receive an error saying "No suitable devices found." When I use the Kinesis app, I can connect with the cube and use all the functions to power a rotational stage, but it fails to connect to my Labview VI. Can I please get some help with this? rmiron
(posted 2019-08-08 10:37:24.0) Response from Radu at Thorlabs: Hello Sudhan. Have you set the SerialNumber property node before attempting to connect? If so, have you made sure to use KDC101's serial number?(as opposed to the stage's) Unfortunately, it sometimes (rarely) happens that the number printed on the cube is different from the one programmed into the unit. That is why it might be worth checking what serial number is shown by Kinesis. I will contact you directly in case these questions are not helpful. paulbertier7
(posted 2018-04-13 14:20:09.58) Hello,
What is the minimum angle step?
Cheers,
Paul bhallewell
(posted 2018-04-20 09:19:03.0) Response from Ben at Thorlabs: Thank you for your feedback, Paul. We state a Minimum Repeatable Incremental Motion of 0.04 degrees in the specs table. maheshswami
(posted 2018-02-15 02:02:56.527) Does it have a through hole/clear axis if the tapped platform is removed. bhallewell
(posted 2018-02-21 03:42:21.0) Response from Ben at Thorlabs: The top plate is a feature of a single moving world assembly & so you can't remove the top plate & use the stage. This stage is designed as a rotation stage as opposed to an optics rotator. For a through hole option, I'd recommend taking a look at our PRM1Z8.
https://www.thorlabs.com/newgrouppage9.cfm?objectgroup_ID=2875
Our K10CR1 stepper actuated optics rotator with integrated controller may also be of interest to you.
https://www.thorlabs.com/newgrouppage9.cfm?objectgroup_ID=8750&pn=K10CR1 |
回転マウント&回転ステージのセレクションガイド
当社では手動式および電動式の回転マウントと回転ステージを豊富にご用意しております。回転マウントの内孔はØ12 mm~Ø12.7 mm(Ø1/2インチ)、Ø25 mm~Ø25.4 mm(Ø1インチ)、またはØ50 mm~Ø50.8 mm(Ø2インチ) の光学素子取付け用に設計されております*。また回転ステージには、様々な部品やシステムが取り付けられるようにタップ穴が配置されております。電動式は、DCサーボモータ、2相ステッピングモータ、あるいはElliptec™共振ピエゾモータにより駆動されます。いずれも360°の連続回転が可能です。
*下表のマウントは、Ø12.7 mm、Ø25.4 mm、Ø50.8 mmの光学素子に対して最適設計されています。Ø12.0 mm、Ø25.0 mm、Ø50.0 mmなどの少し小さい光学素子に対してもご使用いただけますが、光学素子の偏心が重要ではない用途でのご使用をお勧めします。
手動回転マウント
| Rotation Mounts for Ø1/2" Optics | |||||||
|---|---|---|---|---|---|---|---|
| Item # | MRM05(/M) | RSP05(/M) | CRM05 | PRM05(/M)a | SRM05 | KS05RS | CT104 |
| Click Photo to Enlarge |  |  |  |  |  |  |  |
| Features | Mini Series | Standard | External SM1 (1.035"-40) Threads | Micrometer | 16 mm Cage-Compatible | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Compatible with 30 mm Cage Translation Stages and 1/4" Translation Stagesb |
| Additional Details | |||||||
| Rotation Mounts for Ø1" Optics | ||||||||
|---|---|---|---|---|---|---|---|---|
| Item # | RSP1(/M) | LRM1 | RSP1D(/M) | DLM1(/M) | CLR1(/M) | RSP1X15(/M) | RSP1X225(/M) | PRM1(/M)a |
| Click Photo to Enlarge |  |  |  |  |  |  | |  |
| Features | Standard | External SM1 (1.035"-40) Threads | Adjustable Zero | Two Independently Rotating Carriages | Rotates Optic Within Fixed Lens Tube System | Continuous 360° Rotation or 15° Increments | Continuous 360° Rotation or 22.5° Increments | Micrometer |
| Additional Details | ||||||||
| Rotation Mounts for Ø1" Optics | ||||||
|---|---|---|---|---|---|---|
| Item # | LM1-A & LM1-B(/M) | CRM1T(/M) | CRM1LT(/M) | CRM1PT(/M) | KS1RS | K6XS |
| Click Photo to Enlarge |   |  |  |  |  |  |
| Features | Optic Carriage Rotates Within Mounting Ring | 30 mm Cage-Compatiblea | 30 mm Cage-Compatible for Thick Opticsa | 30 mm Cage-Compatible with Micrometera | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Six-Axis Kinematic Mounta |
| Additional Details | ||||||
| Rotation Mounts for Ø2" Optics | |||||||
|---|---|---|---|---|---|---|---|
| Item # | RSP2(/M) | RSP2D(/M) | PRM2(/M) | LM2-A & LM2-B(/M) | LCRM2A(/M) | KS2RS | K6X2 |
| Click Photo to Enlarge |  |  |  |   |  |  |  |
| Features | Standard | Adjustable Zero | Micrometer | Optic Carriage Rotates Within Mounting Ring | 60 mm Cage-Compatible | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Six-Axis Kinematic Mount |
| Additional Details | |||||||
| Rotation Drive Mechanism and Adjustment Range | Manual, 360° Continuous | Coarse: Manual, 360° Continuous; Fine: ±7° Micrometer | Manual, 360° Continuous | ||||
| Optic Mounting | Internally SM2-Threaded Carriage | Internal SM2 Threads in LM2-A | Internally SM2-Threaded Carriage | ||||
| Maximum Accepted Optic Thickness | 0.51" (13 mm) | 0.54" (13.7 mm) | 0.48" (12.2 mm) | 0.46" (11.7 mm) | 0.52" (13.2 mm) | 0.47" (12 mm) | 0.53" (13.4 mm) |
| Post Mounting | 8-32 (M4) Tap | 8-32 (M4) Tap in LM2-B | 8-32 (M4) Tap | Four Counterbores for 8-32 (M4) Cap Screws | Six Counterbores for 8-32 (M4) Cap Screws | ||
| Cage System Compatibility | N/A | Four 4-40 (M3) Taps on Rotation Dial with 60 mm Spacing | N/A | Four Bores for Ø6 mm Cage Rods with 60 mm Spacing | N/A | N/A | |
手動回転ステージ
| Manual Rotation Stages | ||||||
|---|---|---|---|---|---|---|
| Item # | RP005(/M) | PR005(/M) | MSRP01(/M) | RP01(/M) | RP03(/M) | QRP02(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Features | Standard | Two Hard Stops | ||||
| Additional Details | ||||||
| Manual Rotation Stages | ||||||
|---|---|---|---|---|---|---|
| Item # | XRNR1(/M) | XRR1(/M) | PR01(/M) | CR1(/M) | XYR1(/M) | OCT-XYR1(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Features | Fine Rotation Adjuster and 2" Wide Dovetail Quick Connect | Fine Rotation Adjuster and 3" Wide Dovetail Quick Connect | Fine Rotation Adjuster and SM1-Threaded Central Aperture | Fine Pitch Worm Gear | Rotation and 1/2" Linear XY Translation | |
| Additional Details | ||||||
電動回転マウント&ステージ
| Motorized Rotation Mounts and Stages with Central Clear Apertures | |||||
|---|---|---|---|---|---|
| Item # | DDR25(/M) | PDR1C(/M) | PDR1(/M) | PDR1V(/M) | PDXR1(/M) |
| Click Photo to Enlarge |  |  |  |  |  |
| Features | Compatible with SM05 Lens Tubes, 16 mm Cage System, & 30 mm Cage System | Compatible with 16 mm Cage System | Compatible with SM05 Lens Tubes & 30 mm Cage System | Vacuum-Compatible; Also Compatible with SM05 Lens Tubes & 30 mm Cage System | Compatible with SM05 Lens Tubes & 30 mm Cage System |
| Additional Details | |||||
| Motorized Rotation Mounts and Stages with Central Clear Apertures | |||||||
|---|---|---|---|---|---|---|---|
| Item # | K10CR1(/M) | PRM1Z8(/M)a | DDR100(/M) | ELL16 | ELL14 | ELL21(/M) | HDR50(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |  |
| Features | Compatible with SM1 Lens Tubes & 30 mm Cage System | Compatible with SM1 Lens Tubes, 16 mm Cage System, 30 mm Cage System | Compatible with SM05 Lens Tubes, Open Frame Design for OEM Applications | Compatible with SM1 Lens Tubes, Open Frame Design for OEM Applications | Compatible with SM2 Lens Tubes, Open Frame Design for OEM Applications | Compatible with SM2 Lens Tubes | |
| Additional Details | |||||||
| Motorized Rotation Mounts and Stages with Tapped Platforms | ||
|---|---|---|
| Item # | PRMTZ8(/M)a | ELL18(/M)b |
| Click Photo to Enlarge |  |  |
| Features | Tapped Mounting Platform for Mounting Prisms or Other Optics | Tapped Mounting Platform, Open Frame Design for OEM Applications |
| Additional Details | ||

 ズーム
ズーム
Click to Enlarge
プラットフォームPRMTZ8/Mのタップ穴
Click to Enlarge
プラットフォームPRMTZ8のタップ穴
回転プラットフォームには一般的なオプトメカニクス部品の取り付け用にM6タップ穴が5個、M4穴が16個のほかに、当社のプリズムクランプアームPM3/MならびにPM4/M(下記参照)に対応するM4穴が8個付いています。
PRMTZ8/Mには長さ0.4 mのケーブルが付属します。長さ2.5 mのエクステンションケーブル(PAA632)を別途ご購入いただくこともできます。

 ズーム
ズーム
 ズーム
ズーム Click to Enlarge
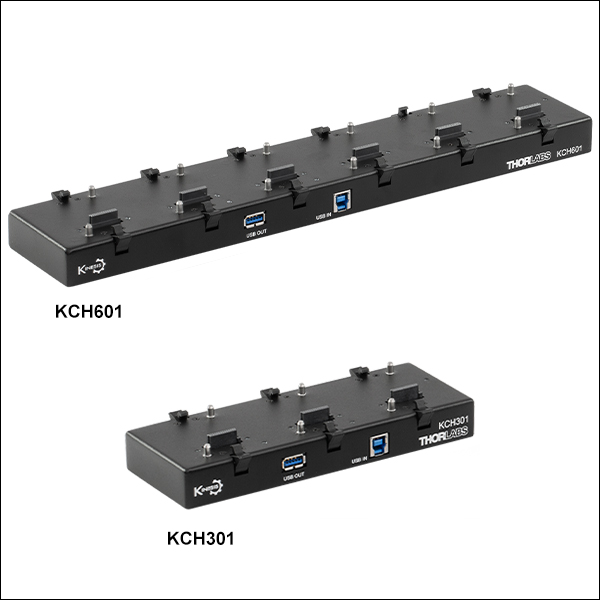
Click to EnlargeK-Cube®モジュールの取り付けられたUSBコントローラーハブKCH601(別売り)
- 上面パネルに電動ステージやアクチュエータ制御用の速度ホイールとデジタル表示器
- 2つの双方向トリガーポート(外部機器からの信号読み取りや外部機器の制御用)
- 付属のUSBケーブルでPCに接続可能
- Kinesisソフトウェアに完全対応
- コンパクトな装置サイズ: 60.0 mm x 60.0 mm x 49.2 mm
- 電源は付属しません(下記参照)
当社のブラシ付きDCモーターコントローラK-Cube®KDC101では、1台のモータの回転軸を手動またはPCで制御できます。上面のコントロールパネルの速度ホイールを用いて、4段階の速度での前後両方向へのジョグ動作と位置のプリセットが可能です。上面パネルのデジタル表示器のバックライトは、メニューを選択することで暗くしたり消灯したりすることができます。ユニット前面には双方向性のトリガーポートが2つあり、5 Vの外部ロジック信号を読み込んだり、5 Vロジック信号を出力して外部機器を制御したりすることができます。それらの設定は、それぞれのポートごとに独立に行うことができます。
このユニットはKinesisソフトウェアパッケージに完全対応しています。 XAソフトウェアは、コントローラKDC101に対しては完全サポートしていますが、ステージPRMTZ8/Mに対しては現時点ではサポートできていません。そのため、Kinesisソフトウェアパッケージをご使用いただく必要がありますのでご注意ください。XAがサポートしている製品の一覧はこちらからご覧いただけます。詳細は「Kinesisソフトウェア」タブをご参照ください。
このコントローラには電源が付属しませんのでご注意ください。対応する電源については下記の「電源」をご参照ください。詳細はDCサーボモーターコントローラKDC101の製品紹介ページをご覧ください。

 ズーム
ズーム
Click to Enlarge
Figure 780A 電源ユニットKPS201(日本国内向けアダプタと共に発送します)
- 電源(単体)
- KPS201: K-Cube®、T-Cubes™ 用、3.5 mmジャック付き
- 電源供給と通信機能を備えたUSBコントローラハブ
- KCH301: 3台までのK-CubeまたはT-Cube用
- KCH601: 6台までのK-CubeまたはT-Cube用
電源KPS201の出力電圧は+15 VDC、最大電流は2.66 Aで、3.5 mmジャックで1台のK-CubeまたはT-Cubeに電力を供給します。標準的な壁コンセントに接続して使用します。
USBコントローラーハブKCH301およびKCH601は次の2つの機能を有しています。1つはハブ機能で、最大3台(KCH301)または6台(KCH601)までのK-CubeまたはT-Cubeをサポートします。もう1つは電源機能で、標準的な壁コンセントに接続するだけで必要な電力の供給を行います。ただし、ハブが供給できる最大電流は10 Aです。お使いになる全Cubeの必要電流が合計で10 A以上にはならないことをお確かめください。 また、このハブに取り付けられたすべてのT-CubeやK-Cubeに対して、1本のUSBケーブルで接続することができます。
USBコントローラハブの詳細は、製品ページをご参照ください。

 ズーム
ズーム
Click for Details
Figure 756A 外形図
- プラットフォームマウント用のクランプ
- ポストの上部にネジ穴、下部にネジ付きスタッド
- ミリ規格製品はM4 x 0.7ネジ
- 保持できる光学素子の最大高さ:24.6 mm~41.8 mm
- 保持できる光学素子の高さを高くするためのエクステンションポストもご用意
- PM3SP/M + PM3/M: 高さ56.1 mmまでの光学素子を保持
- PM4SP/M + PM4/M: 高さ91.7 mmまでの光学素子を保持

Click to Enlarge
Figure 756B クランプアーム用エクステンションポスト、ミリ規格は溝付き
クランプアームは、当社のキネマティックプラットフォームマウント、ステージ、およびV字型クランプに光学素子を固定するためのクランプです。PM3/Mは高さ24.6 mmまでの光学素子を保持します。ポストと光学素子固定用のナイロン製先端付き止めネジとの中心間距離は17.5 mmです。PM4/Mは高さ40.9 mmまでの光学素子を保持でき、ポストとナイロン製先端付き止めネジとの中心間距離は29.3 mmです。クランプアームPM3/MおよびPM4/Mで保持できる光学素子の高さは、それぞれに対応するエクステンションポストPM3SP/MおよびPM4SP/Mを接続することで、さらに高くすることが可能です。これらのエクステンションポストは、クランプアームのセットに含まれているポストと同じものです。すべてのクランプアームにはM4 x 0.7ネジが付属します。
クランプアームPM5/Mはすべて熱処理済みのステンレススチールから製造されているため、温度変動を伴う環境中でも安定しており、また真空にも対応しています。このクランプアームはM4 x 0.7タップ穴が1つ以上あるすべてのプラットフォームマウントやステージにお使いいただけますが、特にPOLARIS-K1M4/Mと組み合わせて使用されることをお勧めしています。PM5/Mが保持できる光学素子の高さは最大41.8 mmまでで、ポスト中心から光学素子を保持する接触点までの距離は22.8 mmです。
クランプアームはすべてフレクシャー機構でポストに取付けられますが、その固定には2 mmのボールドライバや六角レンチを使用します。クランプアーム上部の止めネジで光学素子を固定する際も、2 mmのボールドライバまたは六角レンチを使用します。ポストには、ポストを締め付けるときにトルクを加えるために使用する貫通穴も付いています。その他の情報はFigure 756Aをご覧ください。