 Products Home
Products Homeファイバー偏光コントローラ、電動型
- Polarization Over Full Poincaré Sphere
- Compatible with Ø900 µm Jacketed Fiber
- Operate Remotely Using Kinesis® Software via USB
Application Idea
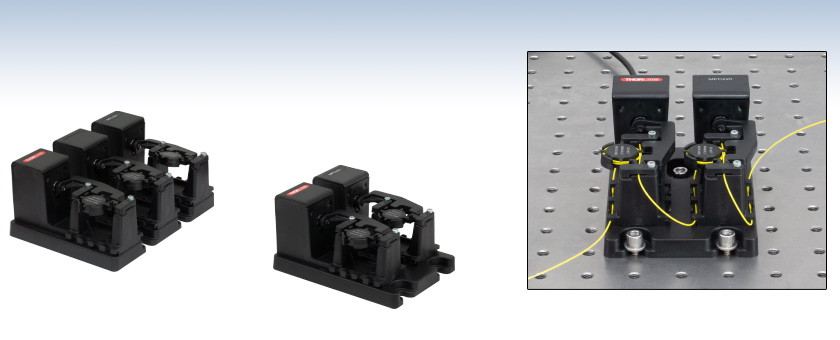
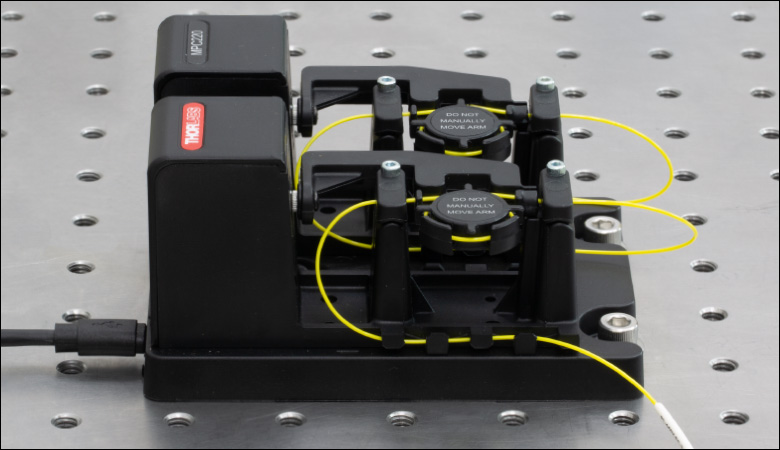
The MPC220 controller, loaded with a Ø900 µm jacketed FC/PC patch cable, is mounted to an optical table using the three mounting slots and 1/4"-20 (M6) cap screws.
MPC320
3-Paddle Controller, Ø18 mm Loops
MPC220
2-Paddle Controller, Ø18 mm Loops











Please Wait
特長
- 偏光状態(直線、円、楕円)の変換
- 電動パドルによる回転(最小ステップ:0.12°)
- ループ径18 mm、2パドル型と3パドル型をご用意
- Kinesis®ソフトウェアパッケージで操作可能
- USB接続による電源供給(USB A-Micro USB Type Bケーブルが付属)
- Ø900 µm被覆付きシングルモードファイバの取り付けが可能
- コンパクトな設置面積
当社の電動型ファイバ偏光コントローラはパドル型の偏光コントローラで、ファイバ内の応力によって誘起される複屈折性を利用して出射光の偏光状態を動的に制御することができます。コンパクトなサイズと内蔵されたDCサーボモータにより、大型の複雑なシステムにも簡単に組み込むことが可能です。各パドルは0.12°の最小ステップで160°まで回転し、ポアンカレ球全体をカバーするができます。こちらのコントローラは黒色のABS樹脂製で、ファイバは付属していません。Ø900 µm被覆付きのシングルモードファイバやファイバーパッチケーブル用に設計されています。
この電動式偏光コントローラには2パドル型と3パドル型があり、各パドルのループ径は18 mmで、それぞれ4回まで巻き付けることができます。応力誘起の複屈折はファイバを曲げることによって生成されます。ファイバが曲がると、ループ面に垂直な軸(スロー軸)とループ面にある軸(ファスト軸)の2本の主軸ができます。その結果、スプールにファイバを巻き付けると偏光状態を変化させる波長板と同じ効果が得られます。パドルを回転させると透過光の偏光に対してファイバのファスト軸の方向が変化し、偏光状態が変化します。動作原理の詳細と、特定のリターダンスを得るために推奨されるファイバの種類とループ数については、「動作」タブをご覧ください。

Click to Enlarge
パドルの番号は底部プレートに2箇所、2つの向きで刻印されています。
Click to Enlarge
Ø900 被覆付きFC/PCパッチケーブルを取り付けたコントローラMPC220。接続されたUSBケーブルは電源供給とKinesisソフトウェアとの通信に使用できます。
ファイバの取り付けとコントローラの設置
ファイバの位置を固定するためのクランプがパドルの前後に付いています。これらのクランプはM2.5ネジを2 mmの六角レンチまたはボールドライバで緩めるだけで取り外すことができ、簡単にファイバが脱着可能です。コントローラ本体とファイバースプールにもファイバを取り付けるためのガイドが付いています。底部プレートに沿ったこれらのファイバ用ガイドは、右の使用例の写真でもご覧いただけます。
2パドル型と3パドル型のどちらの電動偏光コントローラにも、底部プレートにはM6キャップスクリュに対応する貫通穴スロットが付いています。コントローラのスロットを使用して、穴間隔25 mmの光学テーブルやブレッドボード上に自由な向きで固定することができます。各パドルが識別しやすいように、底部プレートの2か所に番号が刻印されています(右端の写真参照)。
Kinesisソフトウェアによるパドルの回転
電動偏光コントローラへの電源は、制御用のPCあるいは電源の供給されているハブとUSB接続することにより供給されます。 各コントローラにはUSB A-Micro USB Type Bケーブルが1本付属します。
パドルの回転は当社のKinesisソフトウェアによって操作できます。ホーミング、ジョグ動作、絶対位置決めなどのパドル動作はGUIパネルから手動で操作可能なため、商品到着後すぐに使用することができます。偏光パドルをユーザの操作無しでも制御できるようKinesisパッケージには、プログラミングインターフェイスが含まれており、動作シーケンスを複数の開発言語でプログラミングすることが可能です。Kinesisソフトウェアやカスタムアプリケーションについての詳細は、「Kinesisソフトウェア」および「Kinesisチュートリアル」タブをご覧ください。
| Fiber Polarization Control Selection Guide | ||||||
|---|---|---|---|---|---|---|
| Polarization Controllers | Linear Polarizers | |||||
 |  |  |  |  |  |  |
| Motorized Fiber Polarization Controllers | Manual Paddle Fiber Polarization Controllers | In-Line Manual Fiber Polarization Controller | Free-Space FiberBench | Faraday Mirrors | In-Line Fiber Polarizers | Polarizing Fiber |
| Item # | MPC220 | MPC320 |
|---|---|---|
| Paddle Specifications | ||
| Number of Paddles | 2 | 3 |
| Loop Diameter (Ø900 µm Jacketed Fiber) | 18 mm | |
| Paddle Rotation | 0 to 160° | |
| Compatible Fiber | Ø900 µm Jacket Single Mode Fibers and Patch Cables | |
| Maximum Number of Loops per Paddle | 4 | |
| Minimum Fiber Length | 75 cm for 1 Loop per Paddle 110 cm for 4 Loops per Paddle | 95 cm for 1 Loop per Paddle 155 cm for 4 Loops per Paddle |
| Minimum Step Size | 0.12° | |
| Maximum Rotation Speed | 400°/sec | |
| Bidirectional Repeatability | 2° | |
| Unit Dimensions (L x W x H) | 85.2 mm x 115.7 mm x 61.0 mm (3.35" x 4.55" x 2.40") | 143.2 mm x 101.4 mm x 61.0 mm (5.64" x 3.99" x 2.40") |
| Footprint for Full Paddle Rotation (L x W x H) | 90.1 mm x 115.7 mm x 62.0 mm (3.55" x 3.99" x 2.44") | 145.3 mm x 101.4 mm x 62.0 mm (5.72" x 3.99" x 2.44") |
| Operating Temperature | -20° to +60°C | |
| Construction Material (Controller Body) | Black Acrylonitrile Butadiene Styrene (ABS) | |
| Motor Specifications | ||
| Motor Type | DC Motor | |
| Motor Drive Voltage | 5 V | |
| CPU Connection | Micro USB Type B (Cable Included) | |
動作原理
この電動偏光コントローラは、応力で誘起される複屈折を利用してシングルモードファイバ内を伝搬する光の偏光状態を変化させます。各スプールにファイバを巻き付けることにより、2つあるいは3つの波長板(リターダ)が形成されます。ファイバで誘起される複屈折の大きさは、ファイバのクラッド径、スプール(ループ)の径(固定)、スプールごとのファイバのループ数、および光の波長の関数になります。(注:この複屈折は、パドルを捻る操作によってではなく、ファイバのループによって誘起されます)。ファイバのファスト軸、つまりファイバを曲げることによって生じる複屈折の主軸は、スプール面内にあります。パドルを回転させることで、透過光の偏光ベクトルに対するこの軸の向きが変化します。任意の偏光状態の入射光を定められた偏光状態の出射光に変換するためには、3パドル型コントローラの場合は1/4波長板、1/2波長板、1/4波長板となるように、2パドル型コントローラの場合は2つの1/4波長板となるように、それぞれのパドルに対してファイバを巻き付けなければなりません。3パドル型コントローラでは1/4波長板が2つに分かれているため、2パドル型に比べてより多くの偏光状態が得られます。各パドルのリターダンスは以下の計算式を用いて推定できます。
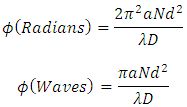
ここで、φはリターダンス、aは定数(石英ファイバは0.133)、 Nはループ数、dはファイバのクラッド径、λは波長、そしてDはループ径です。この計算式はファイバ素線用ですが、Ø900 µmの被覆付きファイバもほぼ同様なので使用することができます(つまり、Ø900 µm被覆付きファイバでN 回まで巻いても結果は変わらないということです)。
3パドル型偏光コントローラ
3パドル型偏光コントローラは1/4波長板、1/2波長板、1/4波長板の順番で並べることで、任意の光の偏光状態を別の偏光状態に変換することができます。最初の1/4波長板は入射光の偏光状態を直線偏光に変換します。次の1/2波長板は直線偏光を回転させ、最後の1/4波長板は直線偏光を定められた偏光状態に変換します。従って、偏光コントローラMPC320は、3つのパドル(ファイバーリターダ)をそれぞれ調整することによって、広い波長範囲 (300~2100 nm)にわたって出射光の偏光状態を完全に制御することができます。
2パドル型偏光コントローラ
小型の2パドル型偏光コントローラは、2つの1/4波長板を用いて任意の偏光状態を別の偏光状態に変換することができます。しかし、2パドル型の構成では偏光の調整が2つのパドル間で結合するため、特定の偏光状態を得るのが難しい場合があります。MPC220は広い波長範囲 (300~2100 nm)にわたり出射光の偏光状態を完全に制御できるように設計されています。
推奨するループ数
パドルのリターダンスは、ループ径が固定である場合はループ数とファイバのクラッド径の関数になります。図1および図2は、それぞれクラッド径Ø80 µmおよびØ125 µmのファイバについての、1パドルあたりのリターダンス(計算値)を示しています。電動偏光コントローラのMPC220とMPC320は小型であるため、各パドルの18 mmのスプールに対して巻けるループ数は最大で4回です。
Click to Enlarge
図2:クラッド径Ø125 µmの石英ファイバ素線をループ径18 mmで巻き付けた時の1パドルあたりのリターダンス
Click to Enlarge
図1:クラッド径Ø80 µmの石英ファイバ素線をループ径18 mmで巻き付けた時の1パドルあたりのリターダンス
波長毎に推奨するループ数とファイバを下表に示します。上の式または図2から得られたループ数で、1/4波長板および1/2波長板に最も近いリターダンスが得られます。
| Wavelength | # of Loops for ~1/4λ Retardationa | # of Loops for ~1/2λ Retardation | Recommended Fiber (Ø125 µm Cladding) |
|---|---|---|---|
| 480 nm | 3 Loops | 2 Loops | 460HP or SM450 |
| 630 nm | 3 Loops | 1 Loops | 630HP or S630-HP |
| 850 nm | 3 Loops | 1 Loops | 780HP or SM800-5.6-125 |
| 980 nm | 2 Loops | 4 Loops | 980HP or HI1060-J9 |
| 1064 nm | 2 Loops | 4 Loops | 980HP or HI1060-J9 |
| 1310 nm | 3 Loops | 2 Loops | SMF-28-J9 or CCC1310-J9 |
ソフトウェア
Kinesisバージョン1.14.52
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Figure 58A KinesisソフトウェアのGUI画面
当社のKinesisソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cube®など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
Kinesisソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内Kinesis駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
Click for Details
図2:3パドル型偏光コントローラによる偏光の回転を示すポアンカレ球
Click to Enlarge
図 1:ファイバーコントローラによって生成される力
実験ファイバーパドルを用いた偏光の操作
ここでは、ファイバ偏光コントローラ(FPC)のパドルの回転が、ファイバからの出射光の偏光状態に与える影響についての測定結果を示します。このコントローラは応力で誘起される複屈折の効果を利用して、ファイバ中を伝搬する光の偏光状態を変化させます。図1のように、偏光状態はパドルの回転によって変化します[1]。各パドルにファイバを適切な回数巻きつけることによって、応力による複屈折の大きさを連続的に調整できることがわかりました。これにより、任意の入射光の偏光状態を希望する偏光状態の出射光に変換することができます。希望する偏光状態を得るために必要な手順と、そのために必要なポアンカレ球上に偏光状態の変化をプロットするステップについて説明します。
当社の実験では、ファブリペローベンチトップ型レーザ(1310 nm)S1FC1310(旧製品)を光源として使用し、それをØ900 µmタイトバッファーファイバに接続しました。このファイバをファイバ偏光コントローラFPC030に取リ付け、出力光はファイバーコリメータを用いて自由空間におけるコリメート光にしました。そのあとは偏光計で直接測定するか、またはλ/4波長計、直線偏光子およびパワーメータで構成したアナライザーアセンブリで測定しました。

図2は、ファイバ内の光の偏光を操作したときの測定結果をパドルの回転に従ってポアンカレ球上に示したものです。線の色は、図1のFPC030の3つのパドルの数字の色に対応しています。1/4波長板として機能させるにはパドルにファイバを2回巻きつける必要があり、1/2波長板とするには3回巻きつける必要があります。図2に示された結果は、巻きつける回数を2-3-2としたFPC030で得られたものです。図2のように、任意の偏光状態から開始しても、それぞれのパドルを何度か繰り返して回転させることで、希望する偏光状態に達することができます。FPCによる偏光の操作では、内部的な損失や後方反射は発生しません。応力による複屈折性はファイバ内の光の偏光を変換するメカニズムとして利用されています。 この実験に使用された装置や実験結果の詳細はこちらをクリックしてご覧ください。
[1] R. Ulrich, A. Simon, “Polarization optics of twisted single-mode fibers” Appl. Opt. 18, 2241-2251 (1979).
| Posted Comments: | |
Seungho Yoon
(posted 2025-05-01 16:02:50.86) Hi
I have bought MPC320
Can i have a Matlab example coding so I can control MPC320 through Matlab?
Thank you spolineni
(posted 2025-05-01 09:35:57.0) Thank you for reaching out to us. I will contact you directly to provide further assistance with your request for MATLAB example code to control the MPC320 Motorized Fiber Polarization Controller. Sofia Mansilla
(posted 2025-02-08 18:48:53.717) Hi! I was wondering if there are any constraints with this product if we want to send it to space. spolineni
(posted 2025-02-11 05:31:45.0) Thank you for reaching out to us. I'll personally get in touch to provide further assistance with your request. Seonguk kim
(posted 2025-01-20 18:41:48.82) I have a question about this product
I would like to confirm a couple of points regarding the PC component and its compatibility with Kinesis software:
You mentioned that the PC component has its own Kinesis software. Does this mean that the PC component can be controlled using LabVIEW through integration with Kinesis software?
To use the Kinesis software, is it necessary to purchase any additional devices or components?
I appreciate your clarification on these questions.
Thank you for your assistance, and I look forward to your response. cstroud
(posted 2025-01-29 09:42:52.0) Thanks for reaching out. The Kinesis DLL's are compatible with Labview, and are located within the Kinesis install folder. I will contact you directly to help set up your application. Mareike Lach
(posted 2025-01-09 13:36:57.127) I have two MPC320 and I want to use them for application at around 1550nm. What do I need to keep in mind when using the MPC320 for the Telecom C-Band? Does the amount of loops change from 1310nm in order to achieve 1/4λ Retardation and 1/2λ Retardation? cstroud
(posted 2025-01-22 05:50:23.0) Thanks for reaching out. We would recommend the same number of loops per paddle as the 1310nm, 3 loops for ¼ wave and 2 loops for ½ wave. I will contact you directly to discuss this further. user
(posted 2024-11-18 12:59:21.947) Hi, May I know what is the typical attn for MPC320 after the installation of the fiber? We are getting about 3dB attn @1550nm. Thx dnewnham
(posted 2024-11-25 07:46:19.0) Thank you for your inquiry I will reach out to you directly to discuss this with you further. Mehmet Müftüoğlu
(posted 2024-10-30 10:48:18.3) Dear Sir or Madam, After installing MPC 320 and setting up the Kinesis software one of the three paddles didn't move regarding given commands. The other two paddles moved with respect to the given commands via Kinesis software. Which instructions should I follow to fully operationalize this device? cwright
(posted 2024-10-31 08:54:21.0) Response from Charles at Thorlabs: Thank you for your query. It could be that the motor has been disabled, in which case this is a quick fix. If the motor is greyed out in the GUI then please click the slider next to the motor to enable it. If this is not the case, and the motor does not respond to commands, then it could be that the motor has failed or seized in position. If the motor has been moved manually while powered it can also be that the gearbox has been broken. I will reach out to you directly to help troubleshoot this and to arrange a replacement if necessary. do'neill
(posted 2024-08-28 05:00:48.0) Thank you for reaching out. I will reach out to you directly to provide an example for using the MPC320. Hevin Yu
(posted 2024-08-16 21:24:24.287) We have a MPC320, and would like use it to control the polarization by wavelength 1550nm. Would you please advise which fiber model number and fiber length can use in our application. Thank you spolineni
(posted 2024-08-22 05:08:19.0) Thank you for your inquiry regarding the use of the MPC320 to control polarization at 1550 nm. For optimal performance, we recommend a Ø900 µm jacketed fiber. We offer various options based on the operational wavelength range, which you can explore and order here: https://www.thorlabs.de/newgrouppage9.cfm?objectgroup_id=949
I will personally reach out to you to discuss your application and specific requirements in more detail and to provide further assistance. user
(posted 2024-05-06 13:28:45.03) Hi,
after buying and testing the MPC320 polarization controller, we noticed that the small radius of the paddles lead to substantial loss within the fiber, rendering it useless for us. I would like to ask which fiber (preferably in a patch cable) would be able to work with the MPC320?
Best regards spolineni
(posted 2024-05-16 12:44:16.0) Thank you for your inquiry. Both the MPC320 and MPC220 controllers are designed for Single mode fibers with a Ø900 µm jacket, ensuring optimal performance and minimal loss within the fiber. I will reach out to you directly to further assist you with your requirements. gao thomas
(posted 2024-04-01 16:08:28.883) I wang use python to control MPC320, Is there a short example python script that could be provided to help with this? cstroud
(posted 2024-04-08 09:18:00.0) Thanks for reaching out. We have an example for the MPCx20 using Python on our Github, https://github.com/Thorlabs/Motion_Control_Examples/blob/main/Python/Integrated%20Stages/Polarization%20Controller/MPCx20_pythonnet.py. I will reach out directly to assist with your application. ben fernandez
(posted 2023-12-07 15:30:36.533) Hi there,
I am following your .net example to connected to the MPC220. I am able to home and jog, however I am unable to set the velocity. Could point me in the right direction? do'neill
(posted 2023-12-20 05:39:04.0) Thank you for your enquiry. The command you would need is the SetPolParams(). I will reach out to you directly to discuss your application. Able Stephensen
(posted 2023-11-16 06:56:08.87) Hi, I recently purchased a MPC320 and have been running into some issues with labview control via the included DLLs. I can't connect to the device and labview.Is there a short example labview script that could be provided to help with this? do'neill
(posted 2023-11-17 07:27:02.0) Response from Daniel at Thorlabs. We have a general LabVIEW guide for connecting to our motion control devices that can be found here - https://www.thorlabs.de/newgrouppage9.cfm?objectgroup_id=12675
I will reach out to you directly to discuss your issues and provide an example. Kis Zsolt
(posted 2023-11-13 14:32:13.33) Hi,
I would like to ask how many MPC320 devices can be controlled simultaneously with the Kinesis DLL library, through the python interface?
Best regards,
Zsolt Kis do'neill
(posted 2023-11-16 08:00:32.0) Response from Daniel at Thorlabs. There is no software theoretical limit to the number of devices that you can connect at once, you may reach a limit based on the number of USB connections you can make. user
(posted 2023-01-21 17:46:14.28) If circular polarization is obtained using MPC320, will the polarization state remain unchanged throughout the fiber? What happens to the polarization state when the light is collimated? DJayasuriya
(posted 2023-02-27 09:45:52.0) Thank you for your inquiry. After achieving the desired polarisation state, if the paddles are unchanged, the polarisation state should remain unchanged. There is no relationship between polarisation state and collimation, theoretically collimation optics should not change the polarisation change, however depending on the substrate and quality of the optic, if there is any optical birefringence this would affect the polarisation state. Hope this helps. if you have any questions please do not hesitate reach out to your local tech support team. user
(posted 2023-01-04 16:14:33.23) Hi, I recently purchased a MPC320 and have been running into some issues with python control via the included DLLs. Is there a short example python script that could be provided to help with this? JReeder
(posted 2023-01-05 09:54:39.0) Thank you for your enquiry. I have reached out to you directly to provide an example Python script for use with the MPC320 and to help troubleshoot any issues you are encountering. user
(posted 2022-11-22 15:39:35.55) Greetings,
I have the MPC 320 and I'm using the P3-SMF28Y-FC-2 cable for 1550 nm as recommended. I want the three paddles to work as QWP-HWP-QWP. So I configured the device such that the first and last paddles have 1-loop while the middle paddle has 2-loops, should this configuration give me the QWP-HWP-QWP functions? Because I'm not getting the desired response for some reason! For example when I have a polarized input and apply 45 degree rotation in the middle paddle I don't observe the output state at an orthogonal state with respect to the input? Haizhong Weng
(posted 2022-11-03 10:47:02.98) Dear Sir or Madam,
We have bought this motorized polarization controller recently. However, when we wrap the fiber patch cable with a Ø900 µm jacket (that is P3-1064Y-FC-5 from Thorlabs). It seems the insertion loss of the polarization controller is very large to 5 dB. Do you have any idea to reduce the loss?
Best wishes
Hai-ZHong Daniel Munoz
(posted 2022-11-02 11:25:27.223) Good morning,
After installing Kenesis following the instructions, I connected the polarization controller MPC320 but this is not detected and paddles are not moving to Home position. Should I update any driver? How can I check the MPC is working and current is being applied?
Thank you.
Daniel M. DJayasuriya
(posted 2022-11-03 09:58:36.0) Thank you for your inquiry. We have reached out directly to trouble shoot your issue. user
(posted 2022-10-27 13:35:12.487) Hi, I'm having trouble trying to control this device with python and the C DLL from kinesis. Do you know where I could fin an example of code using this method ? cwright
(posted 2022-10-28 05:34:05.0) Response from Charles at Thorlabs: Thank you for your query. A member of technical support will reach out to you to help with this. user
(posted 2022-08-12 10:30:27.877) Hi, I was wondering if there was an easy way to control the MPC220 using python. cwright
(posted 2022-08-15 10:56:36.0) Response from Charles at Thorlabs: Thank you for your query. The MPC can be programmed using Python with our Kinesis C DLLs and ctypes. I will send you a short example. Jianing Cao
(posted 2022-07-20 14:34:05.32) 请问能否不通过PC以及软件来控制呢,比如可以利用FPGA直接控制 cwright
(posted 2022-07-20 08:31:01.0) Response from Charles at Thorlabs: Thank you for contacting us. This device can only be controlled over the USB port using either our software or the serial commands documented in the serial command protocol: https://www.thorlabs.com/Software/Motion%20Control/APT_Communications_Protocol.pdf. RuiMing Chua
(posted 2022-05-20 22:00:01.95) Hi, the motorized fiber polarization controller works well on Kinesis. It is compact and lightweight which is great too, though I'm curious why the bend radius of the fiber is kept so small, which could induce greater loss through the fiber.
I would love to be able to control it myself on Python but so far I have not had any luck with that. If you could point me in the right direction or provide the required resources to do so, I would very much appreciate it. Thank you! DJayasuriya
(posted 2022-05-23 07:26:45.0) Thank you for your inquiry. We will get in touch with you directly to help with your request. Mengzhe Lian
(posted 2022-04-09 19:52:41.423) Hi, I would like to connect the MPC320 to a PC using MATLAB codes. Could you please give me some example codes? I can't find any explanations or sample MATLAB codes on websites. I really looking forward to your responses. Thank you. DJayasuriya
(posted 2022-04-11 10:34:03.0) Thank you for your inquiry. We have got in touch with you directly to help. José de-Oliva-Rubio
(posted 2021-11-24 16:01:42.91) Dear Sir or Madam,
We have recently purchased two MPC320, which we have loaded with respective P3-SMF28Y-FC-2 patch cables, as recommended in the controller web page.
We intend to use the MPC320 to substitute two bulkier and more cumbersome FPC562.
First time I have used the MPC320s I have found to my surprise that the total insertion loss for each one is more or less 4 dB (@1550 nm), which render them useless for my experiment, for I can not afford to loose more than 3/4 of the excitation laser even before it hits the DUT.
I have found data of the bend losses of the fiber in the Corning web page, which given the number of loops of each paddle are consistent with my measurements. So, my conclusion is that this level of losses in the controllers is normal given the radius of the paddles (which would have been nice to be warned about before purchasing the controllers).
My question is if I could load the paddles with patches of CCC1310-J9 - 1260 - 1625 nm Low Bend Loss Fiber with Ø900 µm Jacket, Ø125 µm Cladding, which bend losses are much lower than those of the SMF28 Ultra patches.
Also, if I may make you a suggestion, you should include in the specifications of the controllers data about the total insertion losses once they are loaded with the suggested fiber patches, in order to save your customers from nasty surprises.
Best regards,
José de-Oliva-Rubio
Photonics & RF Research Lab (University of Málaga)
Dpto. Ingeniería de Comunicaciones
ETS Ingeniería de Telecomunicación
Universidad de Málaga
Tel: +34952137183
Campus de Teatinos
Bulevar Louis Pasteur nº 35
E29010, Málaga
BIONAND. Andalusian Centre for Nanomedicine and Biotechnology
Centro Andaluz de Nanomedicina y Biotecnología.
Parque Tecnológico de Andalucía, C/ Severo Ochoa, 35
E29590 Campanillas, Málaga. Spain cwright
(posted 2021-12-06 10:38:25.0) Response from Charles at Thorlabs: Thank you for your feedback. I'm sorry to hear this particular fibre has not worked for you. I will pass this feedbacl on to our internal forums for our teams to discuss and consider whether adding expected losses for various fibre types can be added. In regards to the CCC1310-J9 fibre, this is possible to use. It has the same cladding diameter as the SMF28 Ultra and is a recommended fibre for these controllers: https://www.thorlabs.de/newgrouppage9.cfm?objectgroup_id=12896&tabname=Operation Levi Hogan
(posted 2021-11-02 16:26:04.29) I'm getting the following error when trying to insert the "PolarizerControl" control (under the assembly Thorlabs.MotionControl.Controls) in a .NET Container in LabVIEW 2019 (32-bit). Starting partway through the error text:
"System.IO.FileNotFoundException: Could not load file or assembly 'Thorlabs.MotionControl.PolarizerCLI.dll' or one of its dependencies. The specified module could not be found."
I also tried directly selecting as.NET control Thorlabs.MotionControl.PolarizerCLI and .PolarizerUI and neither gives any controls to load. The .Polarizer dll gave a different error.
I was hoping there would be an example VI in the Kinesis examples download but it looks like there isn't one named for polarization control.
The Kinesis GUI itself is able to control the paddles just fine, but I need LabVIEW control for my custom applications. Thank you for your assistance! DJayasuriya
(posted 2021-11-09 10:19:35.0) Thank you for your inquiery. We will get in touch with you directly to resolve your issue. Joonam Park
(posted 2021-11-01 00:20:21.977) I need SCPI commands set for the MPC220. cwright
(posted 2021-11-02 09:26:24.0) Response from Charles at Thorlabs: Thank you for your query. The device can be controlled using the serial commands listed in the APT command protocol documentation: https://www.thorlabs.com/Software/Motion%20Control/APT_Communications_Protocol.pdf li jin
(posted 2021-10-14 14:24:37.553) Can MPC320 be driven by FPGA? cwright
(posted 2021-10-15 04:40:04.0) Response from Charles at Thorlabs: Thank you for your query. If your controller can communicate using serial commands with the following parameters (115200 bits/sec, 8 data bits, 1 stop bit, No parity. RTS/CTS Handshake) then you can use the commands in the APT command protocol to communicate with the device: https://www.thorlabs.com/Software/Motion%20Control/APT_Communications_Protocol.pdf Tangla Kongnyuy
(posted 2021-06-17 16:38:46.447) Hello,
Is there a minimum number of loops required? We have both MPC320 and MPC220
We are working at 1550nm wavelength and also at 900nm wavelength. cdolbashian
(posted 2021-07-12 09:35:55.0) Thank you for contacting Thorlabs with your inquiry. All information regarding polarization data, loops, and wavelength-dependent performance can be found in the product manual where we have explicit test data and setup instructions. I have contacted you directly to discuss your specific application. user
(posted 2020-08-26 11:53:29.243) I am trying to write my own Matlab code for controlling the MPC320. When I try to add .NET library I get the following error:
'Could not load file or assembly "file:///C:\Program Files\Thorlabs\Kinesis\Thorlabs.MotionControl.Polarizer.dll" or one of its dependencies. The module was expected to contain an assembly manifest. Source: mscorlib'
At the same time, other devices, for example K-Cube, can be easily accessed by using .NET lib and I don't get any errors.
What could be the problem? cwright
(posted 2020-08-27 10:53:35.0) Response from Charles at Thorlabs: Thank you for your query. From the error you are getting it appears you are trying to call the native C dll instead of the .NET dll. Only .NET assemblies can be loaded using the “Net.addAssembly” command in MATLAB.
It is the ThorLabs.MotionControl.PolarizerCLI.dll which you require. We will reach out to you by email to see if you need any additional support. Chao Li
(posted 2019-11-20 07:27:51.21) How to realize custom control of MPC320? I did not see the .NET controller after installing the Kinesis® software. AManickavasagam
(posted 2019-12-02 07:22:32.0) Response from Arunthathi at Thorlabs: Thanks for your query. I have contacted you directly for further information which will help troubleshoot. |