 Products Home
Products Home自動ゴニオステージ、±30°回転、ステッピングモータ、コントローラ内蔵

- ±30° Pure Rotational Motion About a Fixed Axis 30 mm Above the Stage
- Integrated Stepper Motor and Controller
- Closed-Loop Operation with ±150 µrad Accuracy
GNM1
Single-Axis Motorized Goniometer,
30 mm to Point of Rotation
ORIC® PDR1 Rotation Stage Mounted on
GNM1 Stage Shown at -30° Position













Please Wait
| Key Specsa | |
|---|---|
| Distance to Axis of Rotationb | 30.00 mm (1.181") ± 0.01 mm |
| Rotation | ±30° |
| Speed | 0.005 - 25 °/s |
| Accuracy | ±150 µrad |
| Centered Load Capacity | 20 N / 2.03 kg (4.47 lbs) |
| Max Torque | 0.5 N•m |
| Moving Platform Size | 50.0 mm x 40.0 mm (1.97" x 1.57") |
| Mounting Holes & Compatible Stagesc | 4-40 - PDR1 Rotation Stage 2-56 (M2) - PDR1C Rotation Stage 8-32 (M4) - PD1 & PDX1 20 mm Stages 00-90 (M1.2) - PD2 & PDX2 5 mm Stages |
| Dimensions (W x D x H)d | 97.0 mm x 82.4 mm x 42.7 mm (3.82" x 3.24" x 1.68") |
Click for Details
可動部の取付け穴と対応ステージ
特長
- 固定された仮想軸を中心とする回転動作
- ステッピングモータとコントローラを内蔵
- Kinesisソフトウェアによるリモート制御、または側面のボタンを用いた手動制御
- 5 V TTLの入出力トリガーポート
- 側面に2°間隔の目盛付き
- コンパクトな設置面積:97.0 mm x 82.4 mm
- 手動および電動の±8°/±5°ゴニオステージもご用意
自動ゴニオステージGNM1/Mは、可動プラットフォーム表面から30 mmの高さに回転中心軸があり、その軸の周りに±30°の範囲で自由回転動作をします(左下の図参照)。マイクロステッピングモータ、光学式エンコーダ、およびリモート操作用に設計されたコントローラを内蔵し、側面には手動作動用のジョグボタンが付いています。トリガ信号の入出力機能があり、5 V TTL信号を用いて外部機器をトリガすることができます。
Click to Enlarge
自動ゴニオステージの図
このステージは当社のKinesis®ソフトウェアパッケージに対応しています(こちらからダウンロードいただけます)。詳細は「Kinesisソフトウェア」タブをご参照ください。リモート接続用の固定ネジ付きUSB Type-CケーブルCABCUL72、15 VDC電源KPS201、および2本のMMCX-BNC入出力ケーブルCA3272が付属しています。 MMCX-SMAケーブルCA3439は別売りでご用意しています。
ステージGNM1/Mには、ORICシリーズのピエゾ慣性アクチュエーター付き回転ステージや直線移動ステージ(移動量5 mm、20 mm)のほか、一般的なオプトメカニクスも取り付けられるように配列された取付け穴が開いています。それらの詳細と取付け可能なステージについては、上の図をクリックしてご覧ください。ステージのベースには、M6取付け穴が3つ付いています。可動プラットフォームとステージのベースには位置決めピン用の穴もあり、付属の位置決めピンを用いて精密な位置決めができます。
各ステージには個別の試験報告書が付属しており、そこには測定された性能の概要が記載されています。試験報告書のサンプルはこちらからご覧いただけます。試験データは、下の製品名のリンクをクリックして移動したページで、ステージに記載されているシリアル番号を入力するとダウンロードできます。
| Item # | GNM1(/M) |
|---|---|
| Stage Specifications | |
| Distance from Top Surface to Axis of Rotation (H) | 30.00 mm (1.181") ± 0.01 mm |
| Distance from Bottom Surface to Axis of Rotation | 70.00 mm (2.756") ± 0.01 mm |
| Platform Size | 40 mm x 50 mm (1.57" x 1.97") |
| Centered Load Capacity (P) | 20 N / 2.03 kg (4.47 lbs) |
| Off-Center Load (Q) | ≤ 20 / (1 + D/40) N (D = Cantilever Dist. in mm) |
| Max Torque (My) | 0.5 N•m |
| Travel | ±30° |
| Speed Range | 0.005 - 25 °/s |
| Max Acceleration (2 kg Load) | 25 °/s2 |
| Bidirectional Repeatability | ±100 µrad |
| Home Location Repeatability | ±100 µrad |
| Min Repeatable Incremental Movementa | 90 µrad |
| Position Angle Accuracy (A) | ±150 µrad |
| Yaw Angular Deviationb | 400 µrad |
| Roll Angular Deviationc | 400 µrad |
| Radius of Confusion (R)d | < 40 µm Max |
| Motor Specifications | |
| Motor Type | Stepper with Microsteps |
| Motor Drive Voltage | ±15 V |
| Max Motor Drive Current | < 150 mA |
| Motion Control Algorithm | Exponential Approach Algorithm |
| Quadrature Encoder Resolution | 0.1 µm |
| Velocity Profile | Trapezoidal |
| Voltage | 15 V Regulated DC |
| Current | 500 mA (Peak) |
| General Specifications | |
| Dimensions (W x D x H) at Mid Travel | 97.0 mm x 82.4 mm x 42.7 mm (3.82" x 3.24" x 1.68") |
| Mass (Without Cables) | 0.45 kg (0.99 lbs) |
仕様の詳細
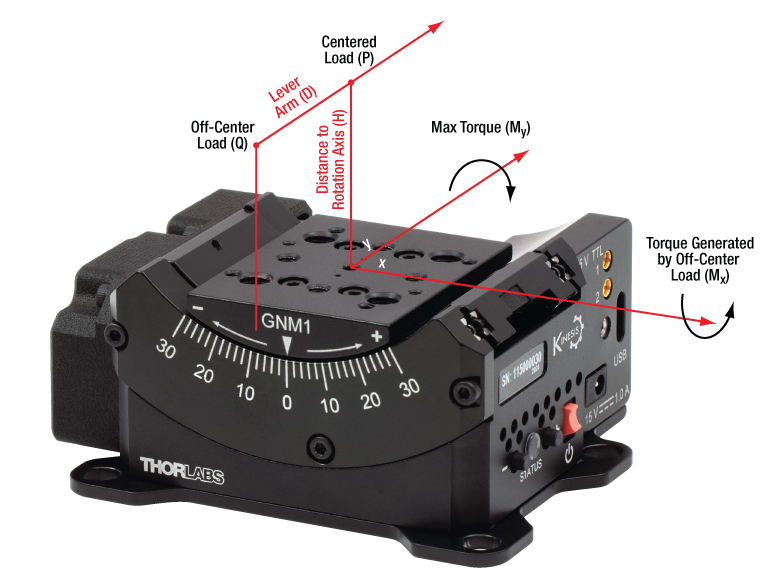
Centered Load Capacity(中心許容負荷)
- 中心許容負荷(P)は、質量中心が回転軸上に位置し、かつ上部プレートの中心の上にある場合の負荷として指定されます。
- 負荷のかかる位置が回転軸に沿ってずれている場合はトルクMxが発生し、許容負荷はQ≤P/(1+D/k)(単位:N)の式に従って減少します。Pはステージの中心にかけられる最大許容負荷を単位N(ニュートン)で表した値で、Dはレバーアームの距離を単位mmで表した値です。係数kはステージのサイズに依存します。ステージGNM1(/M)の場合は、負荷は20/(1+D/40) N以下でなければなりません。
- 負荷が回転軸から外れるとトルクMyが発生しますが、この値はパラメータMax Torqueにより制限されます。トルクMyは全移動範囲においてMax Torqueを超えません。
Click to Enlarge
許容負荷を示す図
ヨー&ロール偏差
Click to Enlarge
ヨー&ロール偏差の測定値(サンプル)

Click to Enlarge
ヨー&ロール偏差を示す図
- Z軸は上部プレートの中心を通り、回転軸に垂直な線として指定されます。
- ヨーは上部プレートのZ軸まわりの回転角度で、ホーミング位置ではゼロと仮定しています。
- ロールは上部プレートのX軸まわりの回転角度で、ホーミング位置ではゼロと仮定しています。
- ヨーとロールの偏差は、最大値と最小値の差として計算されます。
正確さ
- 正確さは最大の位置決め誤差を表します。
- 位置角度は、現在位置とホーミング位置における上部プレート表面の法線ベクトルをXZ平面に投影し、それらの2つの投影像間の角度を計算することで得られます。
Click to Enlarge
正確さの測定値(サンプル)
錯乱半径(Radius of Confusion : R)
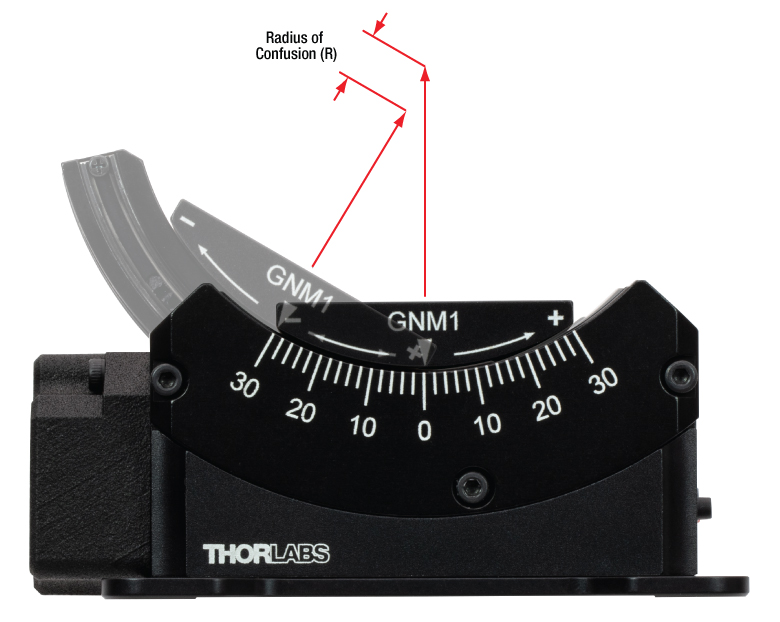
Click to Enlarge
錯乱半径(Radius of Confusion)を示す図
- 錯乱半径(Radius of Confusion)は、中央ホーミング位置に置かれた上部プレートの中心上方における回転軸上の点を、上部プレートにしっかりと固定し、回転軸の周りに回転したときに生じるその点の偏差の大きさを表します。
- 回転したときの点の位置(計算値)とホーミング位置にあるときの点の位置との最大距離で与えられます。
Click to Enlarge
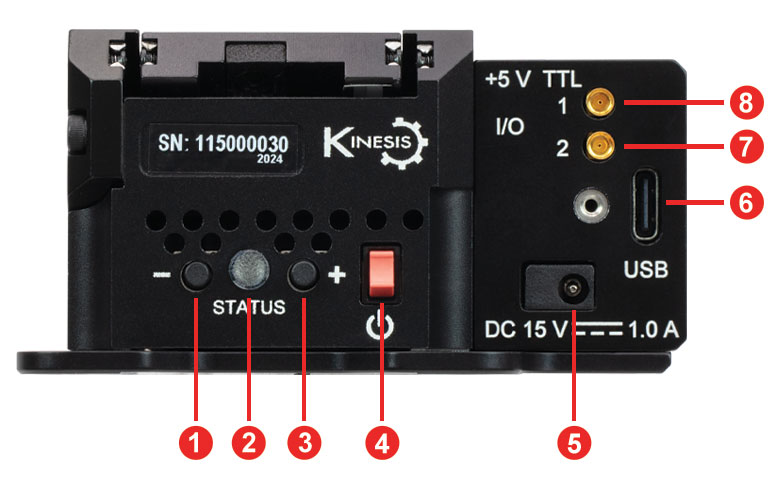
GNM1(/M)の側面パネル
| Side Panel | |
|---|---|
| Callout | Description |
| 1 | Reverse Jog Button |
| 2 | Status LED |
| 3 | Forward Jog Button |
| 4 | Power Switch |
| 5 | Power Supply Connector |
| 6 | USB Type-C Connectora |
| 7 | Input Connector, MMCX Socket, 5 V TTLb |
| 8 | Output Connector, MMCX Socket, 5 V TTLb |

Click to Enlarge
ステージGNM1/Mに含まれるコンポーネント
発送品リスト
ソフトウェア
Kinesisバージョン1.14.53
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Figure 58A KinesisソフトウェアのGUI画面
当社のKinesis®ソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cube®など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークやAPIの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内Kinesis駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
| Posted Comments: | |
| No Comments Posted |