 Products Home
Products Homeピエゾアジャスター付きジンバル式ミラーマウント
- True Gimbal Rotation with Up to 30 mrad Angular Range
- Feedback Sensor Output Enables Closed-Loop Operation
- Angular Resolution: 0.05 μrad (Open Loop) or 0.14 μrad (Closed Loop)
- Operated via Included Controller or PC
PGM1SE
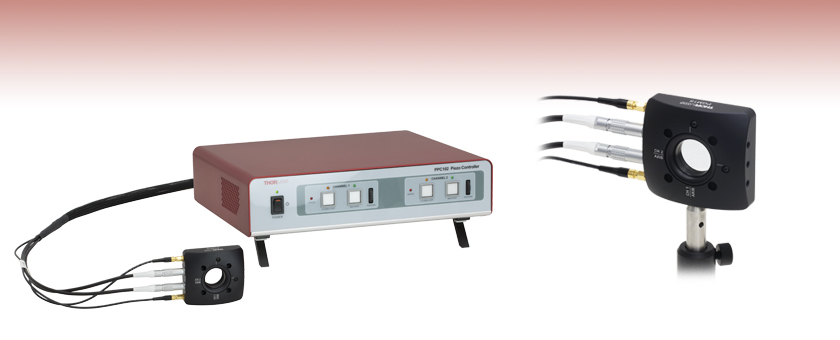
Piezoelectric Gimbal Mount with Included Controller
Piezo Gimbal Mount on Ø1/2" Post







Please Wait
| Key Specificationsa | |
|---|---|
| Piezo Specifications | |
| Piezo Angular Range | 30 mrad ± 15% (Open Loop) 20 mrad (Closed Loop) |
| Angular Resolution | 0.05 µrad (Open Loop) 0.14 µrad (Closed Loop)b |
| Piezo Control Voltage | -25 to 150 V |
| Resonant Frequency (7.0 g Load) | 360 Hz ± 15% |
| Piezo Drive Connectors | Male SMCc |
| Strain Gauge Connectors | Male 7-Pin LEMOc |
| Mechanical Specifications | |
| Optic Size | Ø1.00" (Ø25.4 mm) |
| Optic Thickness | 2 mm (0.08") Min 7.5 mm (0.30") Max |
| Post Mounting Features | 8-32 (M4) Mounting Taps |
| Cage System Compatibility | Four 4-40 Taps for 30 mm Cage Rods |
用途例
- 自動精密ビームステアリング
- レーザ走査型顕微鏡
- LiDAR
- 光学検査、センサ校正
- ターゲット捕捉&トラッキング
Click to Enlarge
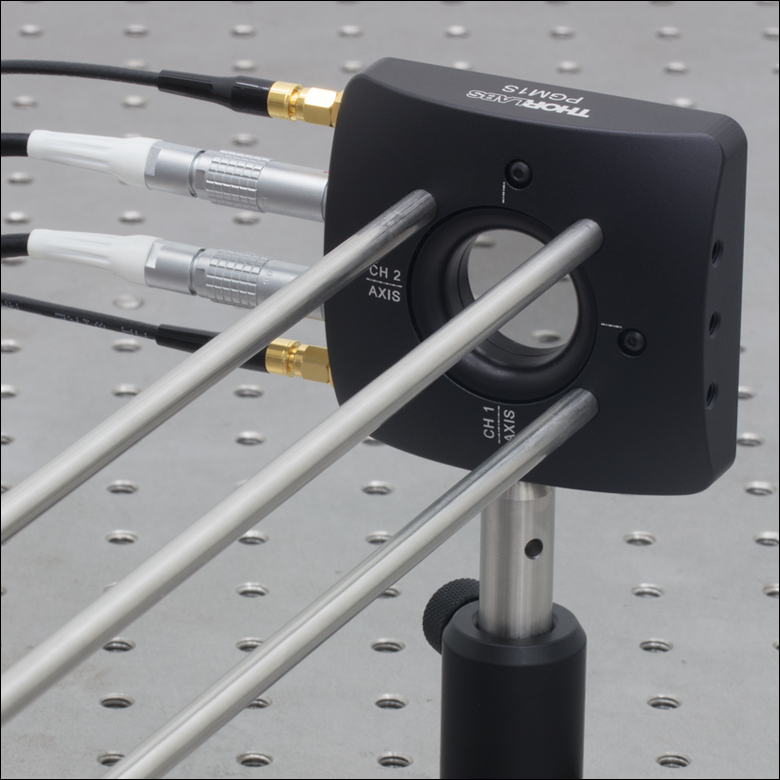
Figure 1.1 30 mmケージロッドを取り付けたピエゾアジャスタ付きジンバル式マウント
特長
- ジンバル回転により、ビーム経路長が変化しない精密な角度調整が可能
- 広い角度範囲:30 mrad(開ループ時)または20 mrad(閉ループ時)
- 角度分解能:0.05 µrad(開ループ時)または0.14 µrad(閉ループ時)
- 閉ループ動作用の歪みゲージフィードバックセンサ
- それぞれの製品ごとに校正されたコントローラが付属
- コンパクトなサイズ:65.0 mm x 81.7 mm x 21.0 mm
- Ø25 mm~Ø25.4 mm(Ø1インチ)光学素子用のSM1内ネジ付き取付け穴
- 30 mmケージシステム取付け用の#4-40貫通タップ穴
- ピエゾによる最小調整角度:0.1 arcsec(0.5 µrad)
ピエゾアジャスタ付きジンバル式マウントPGM1SE/Mは、取付けられた光学素子を、その中心位置を動かさずに2つのジンバル軸周りに回転させます。 開ループモードでは、ピエゾにより軸ごとに30 mradの広い角度範囲を0.05 µradの分解能で走査できます(閉ループモードでは、走査角度範囲は20 mrad 、分解能は0.14 µradになります)。仕様の詳細については、「仕様」タブをご参照ください。
SM1内ネジ付きの取付け穴には、Ø25 mm~Ø25.4 mm(Ø1インチ)の光学素子を付属のSM1固定リングで固定できます。厚さ2 mm~7.5 mmの光学素子を保持できますが、光学素子はマウントの背面から取り付けるため、厚さに関わらずその表面がジンバル軸と一致します。SM1内ネジにSM1レンズチューブを取り付けるとジンバル素子に過度なトルクがかかるため、お勧めいたしません。
マウント上にはM4タップ穴が6つあり、Ø12 mm~Ø12.7 mm(Ø1/2インチ)ポストに取付け可能です。また、マウントの両側の光学素子取付け穴の周囲には、30 mmケージシステム取付け用の#4-40タップ穴が4つあります。
マウントに付属するピエゾコントローラは、それぞれのマウント用に工場で個別に校正され、-25~+150 VDCの電圧を供給します。ピエゾは付属のKinesis® GUIを介して制御できますが、ペアのコントローラを用いてローカルに行うことも、外部から制御電圧を加えて行うことも可能です。詳細については「ソフトウェア&外部制御」タブをご覧ください。コントローラにはPC制御用のUSBおよびRS-232インターフェイス、外部から駆動信号を入力するためのBNC入力端子、マウント内蔵の静電容量センサからの位置フィードバック信号またはピエゾ駆動電圧に比例する信号を出力するBNC出力端子が付いています。また、DB15コネクタからは、外部機器との同期に使用可能な信号を出力することができます。そのほか、USB 2.0(A-B)ケーブルが付属します。
| Mount Specifications | |
|---|---|
| Piezo Specifications | |
| Open Loop Angular Scanning Range | 30 mrad ±15% |
| Closed Loop Angular Scanning Range | 20 mrad |
| Bidirectional Repeatabilitya | 0.32 mrad |
| Bidirectional Accuracyb | 0.49 mrad |
| Crosstalkc | 0.56 mrad |
| Orthogonality Ch1 (X) to Ch2 (Y) | 1.85° |
| Angular Resolution | 0.05 µrad (Open Loop) 0.14 µrad (Closed Loop)d |
| Resonant Frequency (7.0 g Load) | 360 Hz ±15%e |
| Maximum Load | 50 g (0.11 lbs) |
| Maximum Recommended Operating Bandwidth | 50 Hz |
| Maximum Angle of Incidence | 55° Typicalf |
| Piezo Input Voltage | -25 to +150 V |
| Capacitance (per Axis) | 3.5 µF ±15% |
| Closed Loop Stability | ±5.0 µrad |
| Piezo Drive Connectors | Male SMCg |
| Strain Gauge Connectors | Male 7-Pin LEMOg |
| Mechanical Specifications | |
| Optic Size | Ø25.4 mm (Ø1.00") |
| Clear Aperture | Ø22.9 mm (Ø0.90") |
| Optic Thickness | 2 mm (0.08") Min 7.5 mm (0.30") Max |
| Cage System Compatibility | Four 4-40 Taps for 30 mm Cage Rods |
| Post Mounting Features | 8-32 (M4) Mounting Taps |
| Mechanical Drawing (Click to View) |  |
| Controller Specifications | |
|---|---|
| Piezoelectric Output | |
| Output Voltage | -30 to 150 VDC |
| Output Current | 150 mA |
| Voltage Stability | 100 ppm over 24 hoursa |
| Noise | <0.5 mV RMS (Bandwidth 20 Hz to 100 kHz) |
| Typical Piezo Capacitance | 1 to 10 µF |
| External Input (BNC) | |
| Input Impedance | 10 kΩ |
| Input Voltage | -10 to +10 VDC |
| Absolute Maximum Input Voltage | ±20 VDC |
| Input Voltage for Full Range | 10 VDC ±2% |
| External Output (BNC) | |
| Output Voltage Range | 0 to 10 V (Nominal for Full Range)b |
| Minimum Recommended Load Impedance | 10 kΩ |
| Protection | Protected Against Short Circuit |
| Scaling Factor (HV Monitor) | 1/15 (10 V for a Piezo Voltage of 150 V) |
| User Input/Output (D-Type 15 Pin Female) | |
| 4 Digital Inputs | TTL Levels |
| 4 Digital Outputs | Open Collector |
| Trigger Input | TTL |
| Trigger Output | TTL, 5 V Logic |
| User 5 V | 100 mA Max |
| Input Power Requirements (IEC Connector) | |
| Voltage | 24 VDC ±5% |
| Supply Current | <4 A |
| Protection | Internal Fuse, 4 A Slow Blow |
制御やコントローラPPC102のコネクタに関する詳細は、PGM1SE/MのKinesis®用マニュアルをご覧ください。
Click to Enlarge
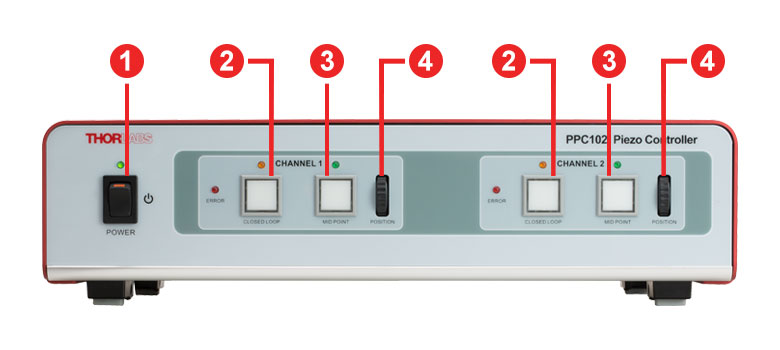
Figure 3.1 ピエゾアジャスタ付きジンバル式マウントコントローラの正面パネル

Click to Enlarge
Figure 3.2 ピエゾアジャスタ付きジンバル式マウントコントローラの背面パネル
| Front Panel Controls | ||
|---|---|---|
| Callout | Label | Description |
| 1 | Power Button and LED | Applies and Removes Power to the Controller |
| 2 | Closed Loop Button and LEDa | Switches the Unit to Closed-Loop Operation |
| 3 | Midpoint Button and LEDa | Moves the Associated Channel to its Midpoint Position Open Loop: Sets Drive Voltage to 60 V Closed Loop: Sets Angular Position to 0 mrad |
| 4 | Position Wheela | Adjusts the Drive Voltage and/or Angular Position |
| Back Panel Controls | ||
|---|---|---|
| Callout | Label | Description |
| 1 | Channel 1 / 2 | Provides the Drive Signal to the Piezo Actuator Connected to the Associated Channel |
| 2 | Monitor 1 / 2 | Used to Monitor the Piezo Actuator on an Oscilloscope or Other Device |
| 3 | Ext In 1 / 2 | Used to Control the Piezo Mount from an External Source Open Loop: -2 to +10 V gives -25 to 150 V Drive Voltage Closed Loop: 0 to +10 V gives ±10 mrad Adjustment |
| 4 | User | Contains a Number of Connections for Programmable Logic Linesa |
| 5 | RS232 | Provides Connection for Serial Port Communication |
| 6 | USB | USB Port for PC Operation |
| 7 | 24 V, 4 A | Power Supply (Included) |
ピエゾ付きマウントのピン配列
ピエゾ駆動用
SMCオス型

入力電圧:-25~+150 V
歪みゲージフィードバック用
7ピンLEMO

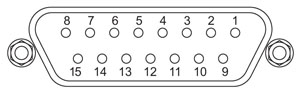
ピエゾコントローラのピン配列
チャンネル1/チャンネル2のコネクタ
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | High Voltage Ground (Return) | 8 | HV Ground (Return) |
| 2 | Not Used | 9 | Not Used |
| 3 | Not Used | 10 | Stage IDb |
| 4 | Sine Wave Excitation Output | 11 | Low Voltage Ground |
| 5 | Not Used | 12 | Low Voltage Ground |
| 6 | +15 V (Preamp Supply)a | 13 | Piezo ID (Legacy Stages)b |
| 7 | Low Voltage Ground | 14 | Position Sense Input (Strain Gauge) |
| Coaxial Male | Position Sense Input (Strain Gauge) | 15 | -15 V (Preamp Supply)a |
| Coaxial Female | HV Output |
ユーザーコネクタa
メス型DB15
| Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|
| 1 | Digital Output 1 | 5, 9, 10 | 9 | Digital Ground | - |
| 2 | Digital Output 2 | 5, 9, 10 | 10 | Digital Ground | - |
| 3 | Digital Output 3 | 5, 9, 10 | 11 | For Future Use (Trigger Out) | 5, 9, 10 |
| 4 | Digital Output 4 | 5, 9, 10 | 12 | For Future Use (Trigger In)b | 5, 9, 10 |
| 5 | Digital Ground | - | 13 | Digital Input 4 | 5, 9, 10 |
| 6 | Digital Input 1 | 5, 9, 10 | 14 | 5 V Supply Output | 5, 9, 10 |
| 7 | Digital Input 2 | 5, 9, 10 | 15 | 5 V Supply Output | 5, 9, 10 |
| 8 | Digital Input 3 | 5, 9, 10 |
RS-232を介したPC制御
オス型DB9
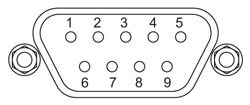
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 6 | Not Connected |
| 2 | RX (Controller Input) | 7 | Not Connected |
| 3 | TX (Controller Output) | 8 | Not Connected |
| 4 | Not Connected | 9 | Not Connected |
| 5 | Ground |
USBを介したPC制御
USB B型(メス型)
外部入力
BNCメス型
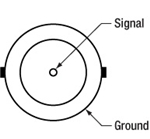
入力電圧:-10 V~+10 V
入力インピーダンス:10 kΩ
外部出力
BNCメス型
出力電圧:0 V~+10 V
出力インピーダンス: 100 Ω
推奨される最小
負荷インピーダンス: 10 kΩ
ソフトウェア
Kinesisバージョン1.14.52
このKinesisソフトウェアパッケージには、対物レンズ用ピエゾスキャナを制御するためのGUIが付属しています。
下記もご用意しております
- 通信プロトコル

Click to Enlarge
Figure 5.2 Kinesis® GUIのピエゾ制御画面
ジンバル式マウントは付属のKinesis® GUI、または外部から供給する制御電圧により駆動できます。制御についての詳細は、Kinesisマニュアル(PDFのリンク)ご参照ください。
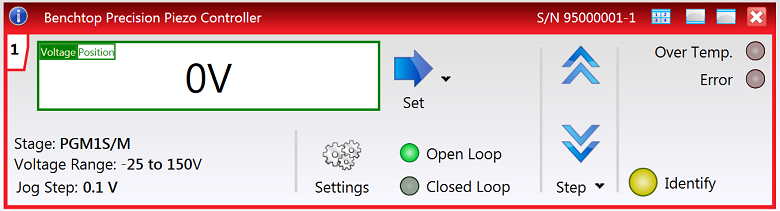
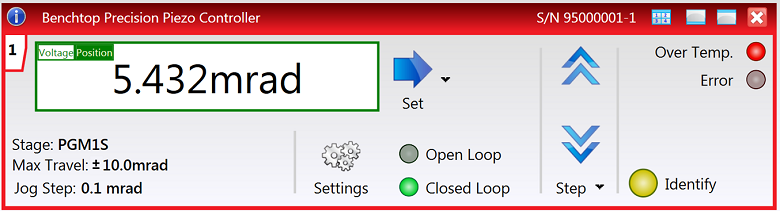
開ループ動作と閉ループ動作
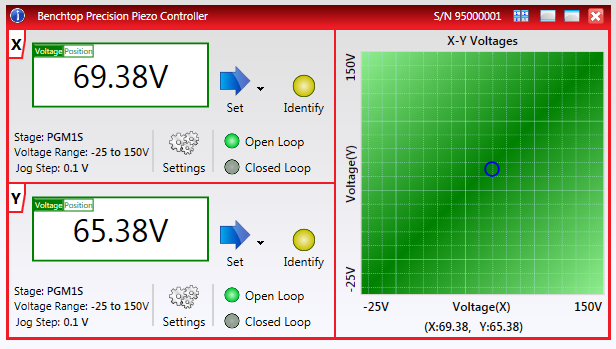
このマウントには開ループと閉ループの2種類の動作モードがあります。開ループ動作では、ピエゾの駆動電圧を調整することで、30 mrad ± 15%の範囲で調整ができます。印加される駆動電圧は角度の調整量に対応します。ピエゾ素子の変位量は印加電圧に対して直線的には変化せず、非線形性とヒステリシスを示します。従って、印加電圧を調整することで単純にマウントの調整をすることはできません。この開ループ動作では、内蔵の静電容量式フィードバックセンサにより角度位置を0.05 µradの分解能で測定できます。
閉ループ動作では、マウントの角度位置(mrad)は20 mradの範囲で直接制御されます。内蔵の静電容量式フィードバックセンサは変位量を0.14 µradの分解能で測定し、閉ループ動作によって駆動電圧を自動的に調整して誤差を補正します。
Kinesis GUI
Kinesis GUIは、開ループおよび閉ループの両方の動作をサポートします。ピエゾ駆動電圧または角度位置を直接入力したり、ユーザが定義した固定量だけ増減することができます。
Click to Enlarge
Figure 5.1 開ループ動作時のKinesis® GUIパネル
Click to Enlarge
Figure 5.3 閉ループ動作時のKinesis® GUIパネル
また、GUIではソフトウェアによるPIDループの調整も可能です。初期設定ではほとんどの用途において安定に動作するように設定されていますが、マウントに取り付けられた特定の光学素子を考慮してPIDループを微調整することで、設定した角度位置に対するオーバーシュートやリンギングを低減することができます。
外部からの制御電圧
コントローラの外部入力用BNCコネクタを用いて外部電圧を加えることができます。開ループ動作においては、-2 V~+10 Vの入力電圧は-25 V~+150 Vの駆動電圧に対応します。これに対し、閉ループ動作においては、0 V~+10 Vの入力電圧は±10 mradの角度調整に対応します。
DB15コネクタ
コントローラ上のDB15コネクタでは複数の電気信号の入出力が可能で、ピエゾステージの動作と他の装置の動作とを同期させるのに使用することができます。このコネクタの詳細は、Kinesis用マニュアル(PDFのリンク)のAppendix A.2に記載されています。
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内Kinesis駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |

Click to Enlarge
PGM1SE(/M)に付属するアイテム(写真には北米対応の電源コードが表示されています)
PGM1SE(/M)には以下のアイテムが含まれます。
- ピエゾアジャスタ付きジンバル式マウントPGM1S/M
- ピエゾコントローラPPC102
- 2チャンネルのピエゾ駆動用および歪みゲージフィードバック用のケーブル束
- USB 2.0(A-B)ケーブル
- 電源と電源ケーブル(日本国内用)
| Posted Comments: | |
| No Comments Posted |