 Products Home
Products HomeMEMS型可変形状ミラー
- Aluminum-, Protected Silver-, or Gold-Coated MEMS-Based Deformable Mirrors
- 12 x 12 Actuator Array (140 Active)
- Mirror 3 dB Bandwidth of ~3.5 kHz
DM140A-35-UM01
12 x 12 Actuator Array
Ø2" x 0.89" Housing
MEMS Deformable Mirror Schematic









Please Wait
特長
- Multi-DM:12 x 12のアクチュエーターアレイ(140アクティブ型)
- アクチュエータの最大移動量:3.5 μm
- ヒステリシス無し
- ナノメートル以下の再現性(平均ステップサイズ<1 nm)
- アクチュエータ間のクロストークが約13%と低いため、高空間分解能が実現
- ミラーは、アルミニウムコーティングまたは金コーティングでご提供可能(「グラフ」タブ参照)
- 400~1100nmの広帯域反射防止コーティング付きの6°ウェッジ保護ウィンドウ
- 提携企業であるBoston Micromachines社(BMC)を通して、1020個(Kilo-DM)のアクチュエーターモデルもご提供可能
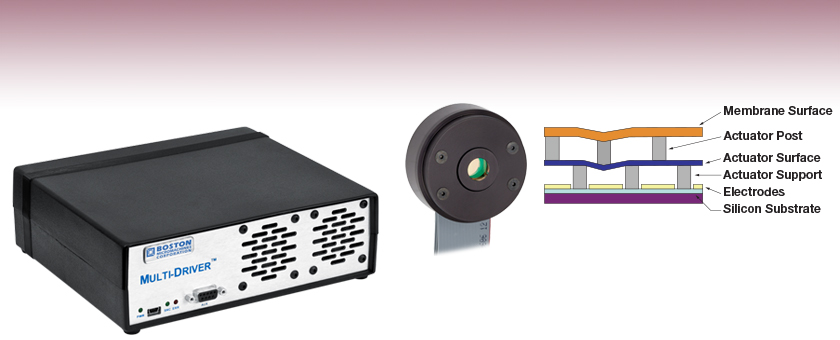
Boston Micromachines社との提携により、当社では光学制御用途に適したMulti-DMタイプのMEMS型可変形状ミラーをご提供しています。 システムへの組み込みや取り付けを容易にするために、可変形状ミラー、ドライバ、制御ソフトウェアをパッケージとしてご提供しています。 ミラーは高度な波面歪み修正を行うために変形します(可変形状ミラーが補正できる収差についての詳細は「収差の種類」タブをご参照ください)。 MEMS型の可変形状方式は、その多様性や技術の完成度および高分解な波面補償能力のため、波面成形の用途で現在最も広く使われている技術です。

当社の可変形状ミラー(DM)は、ポリシリコン基板を微細加工して製造されています。パッケージは取扱いがし易い形態となっており、精密な収差補償を可能とします。 ミラーは、それぞれ個別に制御可能な140個の静電アクチュエータ(Multi-DM:12×12のアクチュエーターアレイにおいて 四隅のアクチュエータが不活性)によって変形するミラー膜で構成されています。 これらのアクチュエータは狭い領域でも3.5 μmのストロークを実現できます。 さらに、Boston Micromachines社を通して、1020個のアクチュエータ(Kilo-DM:32×32のアクチュエータアレイにおいて、四隅のアクチュエータが不活性)を有するKilo-DMのご提供も可能です。 このKilo-DMの可変形状ミラーアクチュエータは1.5 µmのストロークが実現可能です。 ピエゾ素子付き可変形状ミラーとは異なり、静電アクチュエータを使用するこれらの可変形状ミラーはヒステリシスなしで変形できます。
Figure 1.3 可変形状ミラーの電気インターフェイス
Multi-DMおよびKilo-DMのミラーは、金またはアルミニウムコーティング付きでご提供いたします。 ミラーは、 400~1100 nmの反射防止(AR)コーティング付きの 6°ウェッジウィンドウにより保護されています。 反射防止コーティング特性の詳細については「グラフ」タブ内をご参照ください。 異なるコーティング範囲をご希望の場合は当社までお問い合わせください。 可変形状ミラーは天文学でよく使用されていますが、小型で精密波面制御可能なデバイスなので、ビーム成形、顕微鏡、レーザ通信、網膜イメージングの用途でも使用されています。
補償光学
可変形状ミラーは、補償光学(AO)システムを構成する主な3つの部品のうちの1つです。 AOシステムは光ビームの波面を修正(成形)するために使用されます。 可変形状ミラーは、波面センサや制御ソフトウェアと一緒に使用して、収差位相をリアルタイムでアクティブに修正する閉ループ制御系を構成することができます(詳細は「AOチュートリアル」タブをご参照ください)。 当社では、CMOSベースの高速シャックハルトマン波面センサをご用意しています。
これらのシステムは、従来、天文学分野や米国防総省のコミュニティで利用されてきましたが、今後は光の位相制御を必要とする幅広い分野で活用されていくと考えられています。 今日ではすでにフェムト秒パルスシェーピング、顕微鏡、レーザ通信、視力矯正、網膜イメージングなど数多くの分野で利用されています。
| Related White Papers |
|---|
| 補償光学キット | ||
|---|---|---|
 Click to Enlarge |  Click to Enlarge | |
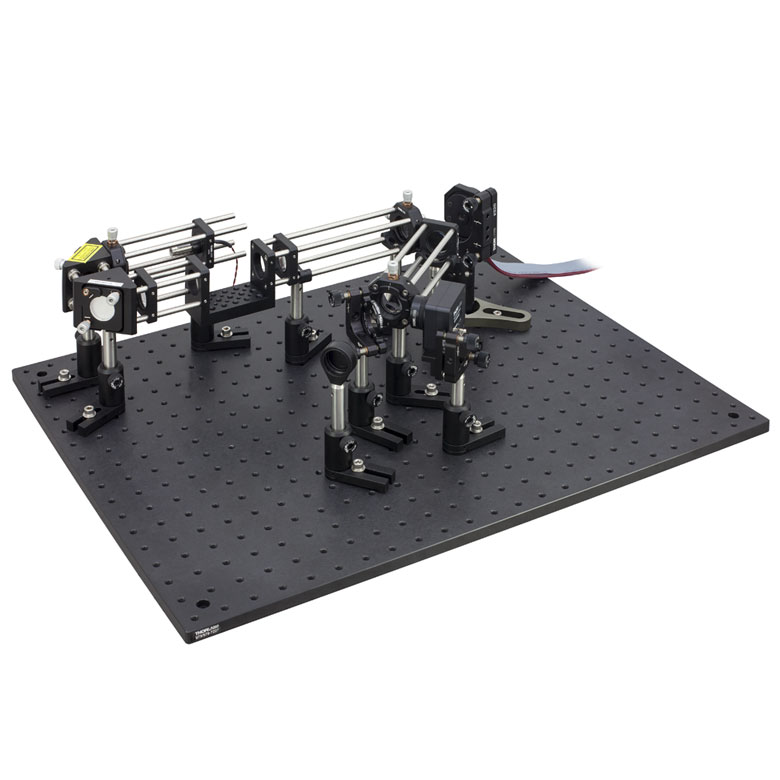
| 補償光学をさらに研究の分野で使用していただけるように、当社はBoston Micromachines Corporation (BMC)社と提携し、補償光学(AO)キットをご提供しております。 キットには全ての補償光学システムで使用される3つの主要部、MEMS可変形状ミラー、波面センサ、リアルタイム制御ソフトウェアがセットとなっております。 また、左の写真で示されている通り、キットには光源、全てのコリメート・イメージング用光学素子、ならびに必要な取付用部品が付属します(ブレッドボードは付属しておりません)。 キットは、コスト面や使い易さを追求し、短時間で組立てて研究に組み込めるよう設計されています。ウェブページのリストに掲載されている部品以外でキットをご希望の場合には当社までお問い合わせください。 | ||
{kind=link}
| Item # | DM140A-35-UP01 | DM140A-35-P01 | DM140A-35-UM01 | Kilo-3.5-DMa |
|---|---|---|---|---|
| Mirror Coating | Aluminum | Protected Silver | Gold | Aluminum, Protected Silver, or Gold |
| Actuator Array | 12 x 12 (140 Active)b | Ø34 (952 Active) | ||
| Actuator Stroke (Max)c | 3.5 µm | 3.5 µm | ||
| Actuator Pitch | 400 µm | 400 µm | ||
| Clear Aperture | 4.4 mm x 4.4 mm | Ø13.2 mm | ||
| Average Step Sized | < 1 nm | < 1 nm | ||
| Hysteresis | None | None | ||
| Fill Factore | > 99% | > 99% | ||
| Acceptance Angle | ±15° | ±45° | ||
| Mechanical Response Time (10% - 90%) | < 75 μs (~13.3 kHz) | < 80 μs (~12.5 kHz) | ||
| Surface Quality | < 30 nm (RMS) | < 30 nm (RMS) | ||
| Cable Length (from Mirror to Driver) | 60" | 2 m | ||
| Driver Specifications | ||||
| Frame Rate (Max) | 8 kHz | 34 kHz | ||
| Resolution | 14 Bit | 14 bit | ||
| Driver Dimensions | 9.0" x 7.0" x 2.5" (229 mm x 178 mm x 64 mm) | 19.0" x 18.5" x 5.25" (483 mm x 470 mm x 133 mm) | ||
| Computer Interface | USB 2.0 | PCIe Card | ||
コーティング特性
下のグラフは、保護ウィンドウがない場合のアルミニウムおよび金コーティングの典型的な反射率特性、ならびに6°の保護ウェッジウィンドウのARコーティング特性を示しています。 アルミニウムと金のコーティング特性は、無偏光ビームを45°で入射した場合に得られたものです。

Click to Enlarge
Figure 3.1 金属コーティング付きミラーの反射率
Click to Enlarge
Figure 3.2 ARコーティング付き6°ウェッジウィンドウの反射率
アクチュエータの変位
Figure 3.3 は、入力電圧に対するアクチュエータ単体の変位および4 x 4のアクチュエータ領域における変位の典型値を示しています。このグラフ情報は、それぞれの可変形状ミラーに付属するデータシート内に含まれています。 各点の設定には多項式フィッティングにより得られた式をベース行われ、その係数は各ミラーに付属するデータシートに記されています。 Figure 3.3は、様々なゼルニケ係数における、波面歪み振幅のPeak-to-Valley値に対するミラーの形状誤差を示しています。

Click to Enlarge
Figure 3.3 電圧に対するアクチュエータの変位および4 x 4のアクチュエータ領域における変位の典型値

Click to Enlarge
Figure 3.4 様々なゼルニケ関数における、それぞれの波面歪み振幅に対するミラーの形状の残留誤差
光学的イメージ形成システムでは、1つの点光源に対して1つの像点が生成されることが理想です。このガウシアン光学(近軸光学または1次光学ともいう)の理想形からの逸脱が収差であり、収差は大きく分けて2種類あります。1つは単色収差で、もう1つは色収差(複数の波長が存在する)です。収差が存在する場合は、ピーク強度が減少し、ターゲットに到達する画像やレーザービームにボケが生じます。下記では7種類の主な収差を説明していますが、5つは単色収差で、残りの2つは色収差です。可変形状ミラーは、波面から全ての種類の単色収差を取り除くことが可能で、回折限界性能を持つ光学素子が光学系に用いられない場合においても、理想的な回折限界の画像を生成します。
単色収差
単色収差には、主な収差が5種類があり、さらに画像を劣化させる収差(球面収差、コマ収差、非点収差)と、画像を歪ませる収差(像面湾曲と歪曲)の2つのサブグループに分類させることができます。これらの収差は、光線が主軸に対し小さな角をなすことを仮定する1次理論(sinθ≈θ)から逸脱した直接的な結果です。sinθ≈θのステートメントは近軸光学の基礎を形成するものですが、レンズ周縁部への入射光においては、このステートメントは有効ではなく、下記展開式の他の項も考慮する必要が出てきます。
5つの単色収差を最初に研究したLudwig von Seidel氏により、これらの収差をザイデル収差(Seidel Aberrations)とも呼びます。sinθの展開は、無限和であるので、収差は下記で言及されている5つの単色収差に限定されるものではなく、他にも画像劣化への影響は比較的小さいながらも、さらに高次の収差があることは念頭に置いておく必要があります。可変形状ミラーでは表面形状を変えることができるので、このような種類の単色収差には全て対応できるようになります。
入射する平行光線にとって理想的なレンズは、Figure 4.1 (a)にあるように光軸上に焦点を結ぶもので、理想的な条件下において光軸上の点光源の像は、薄い円環に囲まれ た明るい円盤状になりますFigure 4.1 (b)で図示されている像で、エアリー回折パターンと呼ばれます。しかしながら、実際には球面状の凸レンズの光軸から遠い位置で入射した光は、光軸に近い位置で入射した光と比べてレンズに近い位置で収束します(Figure 4.1 (c))。結果的に、光は単一の焦点に収束することができずに、画像はぼやけてしまい、殆どの光が中心の明るい円形の領域に集中するエアリー回折パターンは生成されず、球面収差が中心の円盤状の領域から周囲の円環へと一部の光が散らばるので(Figure 4.1 (d))、画像のコントラスト比が小さくなります。球面収差が生じる場合、非補正のレンズにとって最適な焦点は、周縁部と近軸光線の焦点面の間となります。なお、球面収差は点光源が光軸上にある状況でのみ起こる点にご留意ください。

Figure 4.1 理想的な状況と球面収差が生じた状況の比較 (a)理想的なレンズでは、全ての入射光が1点に収束されます (b)点光源に対して理想的なレンズが使用されると、エアリー回折パターンが生じて中心の明るい領域を囲むように同心円の円環が生じます(c)実際のレンズでは、レンズの周縁部の入射光は、レンズ中心部の入射光と比較して大きく屈折するので、全ての入射光が1点で収束することはありません d)球面収差は中心の明るい領域から周囲の同心円状の円環に光の一部が散らばるので、分解能が劣化します。
コマ或いはコマ収差は、点光源の像を劣化させる収差で、点光源がわずかでも光軸外にずれた時に発生します。光軸外の光がレンズに入射するとき、光のレンズ上の入射位置によって光の屈折量は異なります(Figure 4.2 (a))。結果的に各光の環帯は、像面上に少しずつ異なる高さとスポットサイズで焦点を結び(Figure 4.2 (b))、横方向への拡大倍率が異なる結果となります。点光源の像は、上のFigure 4.1 (b)のエアリー回折パターンとは大きく異なるFigure 4.2 (c)のような複雑で非対称の回折パターンとなります。この像では中心が明るく、三角形のフレアがあります。コマ収差の「コマ」は、このような長い光の尾を持った彗星(コメット)のような形状に由来しているといわれています。コマ収差がマイナスかプラスかによって、その光の尾が光軸に向かって出るか、その反対の方向に出るかが決まります。コマ収差は、像に非対称を引き起こすので、多くの場合、最も悪い種類の収差と考えられています。
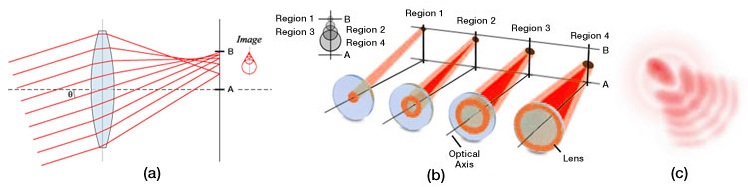
Figure 4.2 プラス方向のコマ収差の図解です (a)光源が軸外で、レンズの多くの部分で像面上の同1点に向けて光が屈折しない状態 (b)レンズの中心領域が円錐の頂点で点像を形成し、レンズ周縁部のより大きな円環は、光軸から遠いコマ円環として生成されます (c)コマ収差は、斑点とアークが引き伸ばされたような複雑で非対称の彗星に似た形状の回折パターンを生じさせます。なお、この回折パターンでは、球面収差の影響はないこととしています。
非点収差は、コマ収差と同様に、点光源が光軸から離れた位置にあるときに生じます。このような条件下では、光の入射円錐はレンズに斜めに入射し、2つの基本曲率で表される屈折波面により、2つの異なる集光点が生じます。Figure 4.3 (a)で見られるように、タンジェンシャル面正接面(メリディオナル子午面ともよばれます)と、サジタル面矢状面がありますが、タンジェンシャル面は主光線(点光源が発するレンズ中心を通る光線)と光軸で決定され、サジタル面は、主光線を含むタンジェンシャル面に対して垂直な面です。Figure 4.3 (a)では、主光線に加え、さらに2つの軸外の光線が図示されています。1つの光線はタンジェンシャル面を通り、もう1つの光線はサジタル面を通っています。複雑で複数の素子を含むレンズシステムの場合(顕微鏡用対物レンズやASOMシステムなど)では、タンジェンシャル面はそのシステムの端から端にわたって単一面ですが、通常はレンズシステムの中の様々な種類の部品が主光線の伝搬方向を変化させるので、サジタル面の傾きは、そのレンズシステムで変化することになります。その結果、一般的には、これらの面ごとに焦点距離が異なることとなります(Figure 4.3 (b)参照)。サジタル面の焦点とタンジェンシャル面の集光点が一致している場合においては、点光源はレンズの軸上にあり、非点収差は存在しないということになります。しかしながら、非点収差の度合いが大きい場合は、この2つの焦点間の距離は増大し、画像の輪郭がぼやけることになります。理想的には点画像が生成される場合において非点収差があると、ぼやけて複雑な一方向に伸びた回折パターンが生じて線のような像が得られることになります(Figures 4.3 (c)と 4.3 (d)参照)。
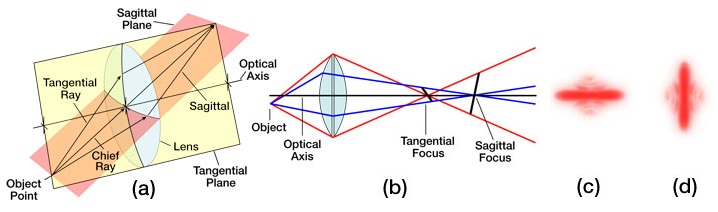
Figure 4.3 球面収差とコマ収差の影響を省いた非点収差の影響が図示されています。(a)タンジェンシャル面とサジタル面が図示されています (b)タンジェンシャル面上の光線と、サジタル面上の光線の屈折率は異なるので、2つの異なる焦点面が生成されます。それぞれタンジェンシャル焦点とサジタル焦点とよばれます (c)タンジェンシャル面での点光源のエアリー回折パターン (d)サジタル面上での点光源のエアリー回折パターン
殆どの光学システムでは、像は平面に生成される必要があります。しかし現実には、軸外収差がないレンズは、ペッツヴァル局面とよばれる曲面に結像します。ぺッツヴァル曲率とよばれるこの表面上の曲面は、レンズの半径の逆数と一致します。正レンズにおいて、曲面は光源面に向けて湾曲しており、負レンズにおいて曲面は光源面にから遠ざかるように湾曲しています。像面湾曲収差は、本来曲面上に生成されている画像を無理に平面上に映し出そうとすることが原因で生じます。像面湾曲がある場合、画像の中心と周縁部の両方においてシャープな画像を得ることは不可能です。焦点面がペッツヴァル曲線の頂点(Figure 4.4 (a)における位置A)に移動すると、画像の中心部分にピントが合って周縁部がぼけるので、外側の画像詳細の判別が不可能になります。これとは逆に、焦点面がペッツヴァル曲線の外縁部(Figure 4.4 (a)における位置B)に移動すると、反対の結果が得られます。つまり画像の周縁部にピントが合って中心部がぼけるわけです。このように極端な画像となることを避けるために最適な妥協案は、像面をペッツヴァル曲線の頂点と周縁部の中間のどこかに設定することですが、いずれの位置であっても画像が視野内全部でシャープ且つはっきりした画像を得ることはできません。

Figure 4.4 点光源が軸外にあることで発生する像面湾曲の原因は、理想的な画像が近軸面ではなく、ペッツヴァル曲面と呼ばれる放物線状の曲面に生成されるからです。 (a)光軸上のいずれかの位置に焦点面を設定することで、視野内の画像の中心部(位置Aの場合)か周縁部(位置Bの場合)のどちらかにピントを合わせることは可能ですが、両方にピントを合わせることはできません。(b)像面が位置Aにある時には、画像中心部がはっきりと見えます c)像面が位置Bにある時には、画像周縁部がはっきりと見えます。
5つめのザイデル収差が歪曲収差です。この収差には各点では焦点がきっちりと合っていても画像全体が歪むという特徴があり、他の全ての単色収差がないときに簡単に識別できる収差です。通常のレンズの異なる場所では、焦点距離や拡大率が異なりますが、歪曲収差はその影響で生じます。レンズシステムで歪曲収差が存在しない時、結像は対象物の完全な相似形となります(Figure 4.5 (b)参照)。しかしながらこの収差が生じるとき、軸外点は像側において通常より遠く又は近い距離で投影され、それぞれ糸巻型(ピンクッション型)の画像(Figure 4.5 (a)参照)、または樽型の画像になります(Figure 4.5 (c)参照)。
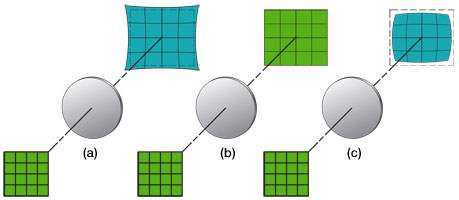
Figure 4.5 他の収差の影響を省いた、歪曲収差の影響が図示されています (a)像が伸びて糸巻型(ピンクッション型)の歪曲収差画像が生じるのは、軸方向距離が長いことに対応してレンズの横方向の拡大率が増加する時です。この時画像の各点は、放射状に中心から外側に投影される傾向があり、各点が中心から遠い距離にあるほど本来あるべき位置から最もずれることになります(b)歪曲収差が存在しない時、画像は対象物体と完全な相似性がありますc)像が縮んで樽型の歪曲収差画像が生じるのは、軸方向距離が長いことに対応してレンズの横方向の拡大率が縮小する時です。この時画像の各点は、放射状に中心に向けて内側に投影される傾向があり、糸巻型の場合と同様に、各点が中心から遠い距離にあるほど、本来あるべき位置から最もずれることになります。
色収差
上で説明した全ての単色収差は、当社の補償光学キットに含まれている可変形状ミラーを使うことで補正できます。しかしながら、広帯域光源を使用する際は、色収 差が発生する場合があります。色収差は可変形状ミラーでは補正はできないので、この収差ついては簡単な説明に留めます。色収差には2種類あり(横収差と縦収差)、これは入射光の波長によってレンズにおける屈折率が異なることが原因で起こります。青色光の方が赤色光より大きく屈折する傾向があるので、レンズは全ての色を同じ焦点に結ぶことができません。この結果、各色について画像サイズや焦点にわずかなバラツキが発生し、画像の周りにハロー(光輪)が生じます。一般的には、ヒトの目はスペクトル中の緑色光に最も敏感であるので、レンズの焦点をその領域に合わせるようにします。この条件下で像面をレンズに近づける(あるいはレンズから遠ざける)と、ぼやけた画像の周縁部は微かに赤み(あるいは青み)を帯びます。
はじめに:
補償光学(AO)は、物理学、化学、電子技術、コンピューターサイエンスなど多くの専門分野に渡って急速に発展している分野です。補償光学システムは、光線の波面を補正(整形)するために用いられます。歴史的に、これらのシステムの始まりは、国際的な天文学と米国の防衛コミュニティにあります。この領域のルーツは、天文学の研究者達が大気乱流によって引き起こされる収差を補償することができれば、高い分解能の天文画像を得ることができると気が付いたことにあります。 研究者達にとっては、画像を鮮明にすれば、今までは見過ごされてきたような暗い対象物でも見つけることができるという利点がありました。天文学の研究者が大気乱流による画像のぼけの問題を解決しようしていた一方で、軍事産業の技術者は、高出力レーザからの光子を正確に1点に集中して、戦略ターゲットを破壊する技術を追究していました。さらに近年においては、AO構成部品が高性能でシンプルになったことで、研究者達はこのシステムをフェムト秒パルス整形、顕微鏡技術、レーザ通信、視力矯正や網膜観察の分野で応用しています。これらは大きく異なる分野ですが、時間変化による望まない影響を抑制するために、AOシステムが、いずれの分野でも役立っています。
標準的な補償光学システムは、(1)波面センサ(波面の歪を測定する)(2)可変形状ミラー(形を変えられる形状変更可能なミラーで、大きな歪のある波面を補正できる)(3)リアルタイム制御用ソフトウェア(波面センサが集めたデータに基づいて、歪んだ波面の補償に必要な可変形状ミラーの変形形状を計算します)の3つの部品から構成されます。これら3つの構成部品は、閉ループ方式で作動します。これは、AOシステムによるいかなる変化も、AOシステム自身が検知できることを意味しています。この閉ループシステムは、原理的には基本的にシンプルで、位相を対象となる光波面の位置の関数として測定し、収差を検知し、補正を計算して、可変形状ミラーを変形させて、補正結果を調べます。さらに、位相収差が時間と共に変化するようであれば、必要に応じてこのプロセスは何度も繰り返されます。この手順をふむことで、補償光学システムは、投影された光の波面から収差を取り除いて、光学分解能を向上させることができます。
波面センサ:
補償光学システムにおける波面センサの役割は、実際の波面を参照波面と比較して、ズレを測定することです。波面検出には3つの基本的な方法があります。 シャックハルトマン型波面センサ、シヤリング干渉計と曲率センサです。雑音、精度、感度、そして制御用ソフトウェアや可変形状ミラーとのインターフェイスの相性など、方法によってそれぞれ利点があります。これらの中では、シャックハルトマン型波面センサが最も一般的に使用されています。
シャックハルトマン型波面センサは、マイクロレンズアレイを使って入射光を多数の小さなビームに分割します。分割後の各ビームは、マイクロレンズアレイの焦点面に位置決めされたCCDカメラ上に結像されます。均一な平面波がシャックハルトマン型波面センサに入射する時(Figure 5A参照)、焦点は各マイクロレンズの光軸上に位置することになり、焦点面上の等間隔のグリッド中に規則正しい点として並びます。しかし、歪みのある波面の場合(全ての平面ではない波面)、焦点は各マイクロレンズの光軸から外れて位置することになります。各点の中心からのズレは、各マイクロレンズの位置での波面の局所傾斜(ティルト)に比例します。したがって、波面位相は、測定して得られた点のズレの数値から(定数の範囲内で)再形成することができます(Figure 5Bを参照)。
Figure 5A 平面波がシャッ クハルトマン型波面センサのマイクロレンズアレイに入射する時、CCDセンサ上の結像スポットは、等間隔のグリッド中に規則正しい点として並びます。しかし、歪みのある波面の場合、各点は各マイクロレンズの光軸から外れて位置することになります。歪みが大きいと、結像スポットがグリッド内から外れるほどズレる場合があります。このデータで、マイクロレンズアレイに入射した波面形状を計算することが可能になります。
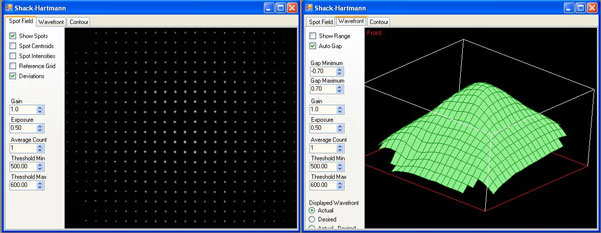
Figure 5B 2つの図はそれぞれシャックハルトマン型波面センサを用いて取得した画面です。1つはスポットフィールド(左側)で、もう1つはこのスポット位置データを計算して得られた波面(右側)です。
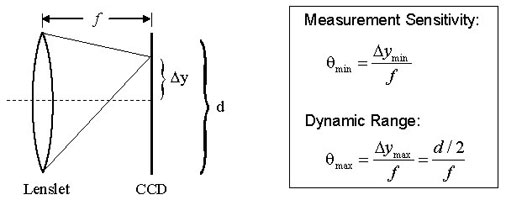
Figure 5C シャックハルトマン型波面センサにおいて、ダイナミックレンジと測定感度は競合する特性です。この数式では、fがマイクロレンズの焦点距離、 Δyがスポット変位、そして d がマイクロレンズの直径をあらわしています。測定感度θ min とダイナミックレンジθmax を表す数式は、小角度近似から得られます。θminは波面センサで測定可能な最小波面傾斜です。検出可能な最小のスポット変位がΔymin で表されており、これは、フォトディテクタのピクセルサイズ、重心アルゴリズムの精度やセンサの信号対雑音比などで決まります。θmax は最大波面傾斜ですが、波面センサで測定可能で、マイクロレンズ直径の半分に等しいΔymaxのスポット変位量に対応します。したがって、感度を上げるとダイナミックレンジが減少する、あるいはその逆となります。
シャックハルトマン型波面センサの性能に大きく影響を与える4つのパラメータは、マイクロレンズの数(または通常は約100 ~600 μm の範囲内のマイクロレンズの径)、ダイナミックレンジ、測定感度、そしてマイクロレンズアレイの焦点距離です(通常は数 mmから約30 mm)。マイクロレンズの数によって、ゼルニケ係数の最大数が決まります。ゼルニケ係数では、再構成アルゴリズムで確実に計算可能で、研究によれば元の波面を表すのに使用する係数の最大数は、おおよそマイクロレンズの数と一致します。必要となるマイクロレンズの数を決めるには、モデル化しようとしている歪みの量を考慮する必要があります(真の波面収差を効果的に表わすにはゼルニケ係数がいくつ必要か、など)。測定感度θmin とダイナミックレンジθmaxは、仕様において相反する因子です(Figure 5Cを参照)。前者は、検出可能な最小位相を決定し、後者は測定可能な最大位相を決定します。
シャックハルトマン型センサの測定精度は、焦点スポットの参照位置に対する実際の位置の変位量を測定できる精度(測定の信頼性の高い最小波面傾斜など)に依存します。なお、この参照位置は、マイクロレンズの光軸上にあります。従来のアルゴリズムでは、スポット同士が部分的に重なってしまった場合やマイクロレンズの焦点スポットがセンサの検知領域外に位置してしまった場合(スポットクロスオーバ)は、スポットの正しい中心値は計算できませんでした。このような問題を克服するために、特別なアルゴリズムを適用することはできますが、その場合、センサのダイナミックレンジを制限することになります(信頼性をもって測定できる最大波面傾斜など)。システムのダイナミックレンジは、直径の大きなマイクロレンズか焦点距離の短いマイクロレンズを使用することで、大きくできます。しかし、マイクロレンズの直径は、必要なゼルニケ係数の数に左右されるので、ダイナミックレンジを増やす他の唯一の方法は、マイクロレンズの焦点距離を短くすることになります。ただし、この場合は測定感度が低下します。適切な選択は、必要とされるダイナミックレンジと測定感度に対応した最長の焦点距離をもったレンズを選ぶことです。
シャックハルトマン型波面センサを用いれば、計算した波面と同時に、強度分布の情報も得ることができます。この2つのデータは、混同しないように留意してください。Figure 5Dの左側の図が強度分布のサンプルで、右側の図がそれに対応した波面プロファイルです。様々な波形の関数の分布から、同じ強度プロファイルが得られる場合があります。
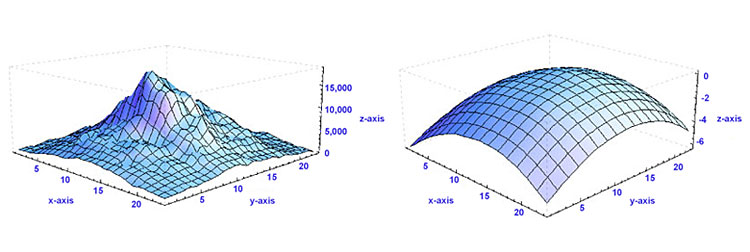
Figure 5D シャックハルトマン型波面センサでは、各マイクロレンズでのパワーや計算によって得られる波面分布など、いくつかの情報が得られます。左の図はサンプルの強度分布で、右の図はそれに対応した波面です。
可変形状ミラー:
可変形状ミラー(DM)は、シャックハルトマン型波面センサで測定された収差を補償するために出される位置コマンドに対応して、形状を変化させます(DMが補正できる収差については、「収差」のタブ内をご覧ください)。適切なのは、ミラーが収差プロファイル(Figure 5E参照)と対になる表面形状となることです。多くの場合、表面プロファイルは、印加電圧の入出力で動作するミラー表面下のアクチュエーターアレイによって制御されます。可変形状ミラーにはいろいろな方式がありますが、一般的なのは2種類で、セグメント型と連続型があります(Figure 5Fを参照)。セグメント型ミラーは、独立したフラットなセグメントで構成されていて、上下に限定して動くタイプ(各セグメントが1つのアクチュエータで制御されている場合)と、あおり調整(チップ&チルト)、または上下運動をするタイプ(各セグメントが3つのアクチュエータで制御されている場合)があります。 これらのミラーは、通常ホログラフや空間光変調器で使われています。この構成の長所としては、セグメントを厳密な精度要件に対応して製造できること、各セグメントが独立して動くので、隣接したセグメント同士のカプリングが起こらないこと、そしてセグメント毎に自由な角度で動く点などが挙げられます。一方で、セグメント間の均等なスペースは、回折パターンのような機能を果たすので、光線に回折モードの影響が出てしまいます。さらにセグメント型ミラーで歪んだ波面を補償する場合では、連続型ミラーより多くのアクチュエータが必要になります。セグメント型DMの光学的な問題を解決するために、連続的なフェイスプレート型のDMが製造されました(当社のAOキットに含まれているのはこの種類です)。この型の方が、セグメント型よりフィルファクタ(実際に反射するミラーの面積率)が高くなります。この型の難点は、アクチュエータが機械的にカプリングされていることで、1つのアクチュエータが動くとミラー表面全体にいくらかの影響が生じることです。1つのアクチュエータの位置を動かすことで、表面に形成される2次元の形状は、そのアクチュエータの影響関数と呼ばれています。連続型で隣接するアクチュエータの変位量は、通常、作動高さの10~20%で、この数値はアクチュエーターカプリングと呼ばれています。セグメント型DMではカプリングはゼロですが、これは必ずしも望ましい状態とは言えない点にご留意ください。

Figure 5E フラットなミラーとMEMS可変形状ミラーの補償効果を図示しています。(a)収差のない波面がフラットなミラー表面に入射すると、反射後も波面には収差が生じません。(b) フラットなミラーでは、波面の変形を全く補正できないので、入射した光の収差が大きい場合、反射後も収差が生じた状態です。(c) MEMS可変形状ミラーは収差を補償するために表面を変形させることができます。DMは収差に対応した適切な形状に変化し、収差の大きい入射光の波面を補正できるので、反射後の光線には収差がありません。

Figure 5F BMCの連続型(左)とセグメント型(右)のMEMS可変形状ミラーの断面図で、主な構成部品を図示しています。
特定の可変形状ミラー(DM)で修正できる波面範囲は、アクチュエータのストロークと分解能(アクチュエータの数と分布)、そしてDMに適した制御信号の決定に用いられるモデルで決定します。はじめの2つの条件は、DM自体の物理的条件ですが、最後の条件は制御ソフトウェアに起因する条件です。アクチュエーターストロークは、DMアクチュエータのダイナミックレンジ(最大変位量)と言い換えられ、通常はμm単位で表記されます。アクチュエーターストロークが不適切な場合、性能が低下し、制御ループの収束を妨げる場合があります。 ミラー補正の自由度は、アクチュエータの数によって決まります。正方形、三角形、六角形等、様々なアクチュエーターアレイ形状が提唱されてきましたが、殆どのDMには正方形のアクチュエーターアレイが使われています。これは、直交直線座標上で位置決めが容易で、波面センサの正方形の検出アレイと対応させやすいからです。なお正方形のアレイを円形の開口部にあわせる為に、四隅のアクチュエータを取り外す場合があります。他の構成を用いれば、規定面積に対してさらに多い数のアクチュエータを配置することはできますが、製造工程が複雑になるので、通常はこのようなアクチュエータの追加は実施されません。
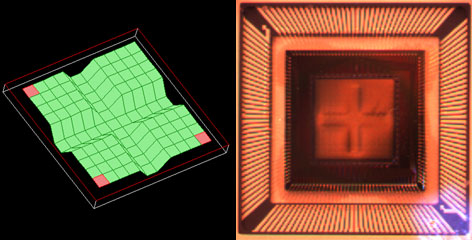
Figure 5G DMの表面上に十字型のパターンがあります。これはこのアレイの真ん中を上下に走る2列と左右に走る2列のアクチュエータ(計44個)を最大限にたわませるのに必要な電圧を印加してつくられました。 左側の画像は、AOキットソフトウェアの画面でDM表面を画像化したものです。一方で右側の画像は、準暗視野照明で得られたもので、前述の設定がプログラミングされた時の実際のDMの表面です。なお、写真の右下角にあるのは、照明用の白色光です。
Figure 5G(左の枠内)にあるのは、補償光学キットに含まれる可変形状ミラーの12 x 12のアクチュエーターアレイが形作っている十字形です。このような形になっているのは、ミラーメンブレン上に完全なたわみが生じるように、中央に位置している横2列、縦2列のアクチュエータに電圧が印加されているからです。DM表面を示すソフトウェアが生成した画像に加えて、同じプログラム条件で、準暗視野照明を使用して、実際の可変形状ミラー表面を撮影した写真が右側にあります(Figure 5G)。
制御用ソフトウェア:
補償光学の系では、制御ソフトウェアが波面センサと可変形状ミラーの間をつなぐ重要な役割を果たします。このソフトウェアは、波面傾斜に比例する波面センサの電子信号を補償電圧コマンドに変換して、DMの各アクチュエータに送ります。補償光学システムの閉ループの帯域幅は、計算実行の速度と精度に直結します。しかし、通常においては、これらの計算は収差の変化より短い時間で実行されなければなりません。
制御ソフトウェアは、基本的にはスポットフィールドの変位を利用して光線の位相を再構成し(この場合はゼルニケ多項式を用います)、それに対応したコマンドをDMに送出します。有効なゼルニケ多項式のデータを出力するために、最小二乗法による近似が適用されています。これが唯一の方法ではありませんが、ゼルニケ多項式は光線の位相を表現する便利な方法です。これらの多項式は、単位円上に焦点、ティルト、非点収差やコマ収差などを表す異なる光の直交基底を構成します。多項式は正規化されるので、各項の最大値(ピストンの項は除く)は+1、最小値は-1となり、表面全体の平均値は常にゼロとなります。また、2つの異なる収差が組み合わさって新しい収差が生じることは決してないので、存在する収差がどの種類であるかは常に明らかです。
| Posted Comments: | |
user
(posted 2024-02-21 18:18:39.57) We need a mirror file named "BMC Multi DM v4.mir" for a multi DM bought in 2015. Please sent it to us. ksosnowski
(posted 2024-02-22 04:27:16.0) Thank you for requesting this file from us. The necessity of this stems from using new AOkit software with an old device (2015). Rather than this approach, we have sent you the old software for your 2015 AOkit. Because of this approach, the file you request here was not required, and your system has been confirmed to be working. For newer mirrors, BMC has recently started a database for the modern formats of mirror files which can be accessed here for use with our current AOkit software: https://bostonmicromachines.com/customer-files/ user
(posted 2023-11-08 17:10:07.873) Hello, I am using this multi-driver with deformable mirror, and the input range of this DM is from 0 to 1 in the software. I could connet this DM and control it using Matlab. If I provide a command greater than 1, like 1.5 or 2, what would happen to DM? Is it still safe? or does it damage the DM? cdolbashian
(posted 2023-11-15 03:57:19.0) Thank you for reaching out to us with this inquiry. Looking into the documentation within the manual, we see that the 0 and 1 correspond to the minimum and maximum stroke respectively. Increasing the value beyond this will not increase the actuator's stroke. I have contacted you directly to inquire after your application and the need for such an input. USER A
(posted 2023-07-18 12:32:24.85) hi, I wonder which parameter determines the accuracy of modifying the wavefront? Is the Surface Quality? cdolbashian
(posted 2023-08-04 12:27:18.0) Thank you for reaching out to us with this inquiry. Surface quality surely contributes, but accuracy of piezo-electric actuator position is also a key factor, as this is what distorts/corrects the wavefront. I have reached out to you directly to discuss your application. For all other performance specs, please see the "specs" tab above. marcotronixs
(posted 2016-04-01 17:24:02.623) hello good afternoon, just to see if they could send me a copy of a DM software kit that makes adaptive optics buy time with you. The UM01 AOKI kt is the name of the Autonomous University of Puebla Mexico City besembeson
(posted 2016-04-05 09:09:57.0) Response from Bweh at Thorlabs USA: Yes we can send the software to you. I will contact you. ilitivn
(posted 2015-12-14 04:59:50.34) Good day.
Can you send me a price for your Deformable Mirrors?
Thanks.
Igor. jlow
(posted 2015-12-14 11:14:47.0) Response from Jeremy at Thorlabs: The latest price is listed on the website for the deformable mirror system. To request a quote, you can contact us directly at sales@thorlabs.com. rscholl
(posted 2013-01-03 14:31:00.0) Response from Ryan at Thorlabs: We do not believe our deformable mirror is fast enough to provide the spatial incoherence required by your application. Other things you might consider could be: (1) guiding the light through a multimode fiber resting on a vibrating surface, (2) a second diffuser rotating in the opposite direction of the first, or (3) an integrating sphere with an input and output port following your rotating diffuser. I also contacted you by email. madhavi.krishnan
(posted 2012-11-25 10:28:09.293) Hello, I am interested in distorting a planar wavefront at > 10 kHz in order to destroy the spatial coherence in the beam for an interferometric application. I was looking at the SLMs here as a way of doing that, but the less expensive 6x6 may not be fast enough for what we want to do. The faster one may be an overkill since we do not need a programmable distortion. Could you suggest another optical component, perhaps electro-optic or acousto-optic that might deliver spatial distortion of the wavefront at high speeds. Essentially I am looking for the same effect on the beam as that produced by a rotating ground glass diffuser, just orders of magnitude faster than the mechanical. Any input would be highly appreciated.
Thanks and best wishes, Madhavi jlow
(posted 2012-09-26 14:57:00.0) Response from Jeremy at Thorlabs: The actuator stroke is the maximum displacement of the DM actuators. user
(posted 2012-09-26 12:58:07.0) Hello, can you tell me what in your description "stroke" of the DM means...is it the stroke between 2 adjacent actuators or for the whole DM area? Sincerely Yours, Thomas tcohen
(posted 2012-04-13 11:20:00.0) Response from Tim at Thorlabs: Peak power for a CW beam is about 200W/cm^2. Note that this is based off of measurements taken at 1550nm. As for the Shack-Hartmann Wavefront Sensor, the max power will depend on the wavefront curvature. The flatter the wavefront, the smaller the focus size of the spots on the camera, and thus the higher the power density on those spots. Typically a power of a few 10's µW spread over the whole sensor area will give you a good SNR. For a flat wavefront, 1mW will already saturate the sensor. Lehmann
(posted 2012-04-12 19:07:34.0) I would like to know the maximum power at 1.06 um I can put on your deformable mirrors. I would also like to know how much power I would have to put into the Shack-Hartman Wavefront sensor. If I purchase a pair user
(posted 2010-08-17 06:25:36.0) Please, put "mirror, driver and software included" down by the price box.
From Alex user
(posted 2010-06-02 23:14:46.0) Response from Javier at Thorlabs to nssycit: we can send you the manual for the AO Kit, which contains useful information regarding setup, alignment, and software (It is also available here: http://www.thorlabs.com/NewGroupPage9.cfm?ObjectGroup_ID=3208). We can gladly assist you if you have particular questions. nssycit
(posted 2010-06-02 21:11:09.0) Hello
I have downloaded the wavefront sensor control softwear, and I want to kown more about AO systems and deformable mirrors softwares, but your company doesnt have these for downloading. So I want to kown how I can get these control softwares befor I purchase these products. thanks much.
Best wishes! jjurado
(posted 2010-06-01 21:06:58.0) Response from Javier at Thorlabs to nssycit: AR stands for anti-reflective. The protective window use in the deformable mirrors is coated with a broadband anti-reflective coating with low reflectivity in the 400-1100 range (see Graphs tab). nssycit
(posted 2010-06-01 17:24:32.0) in “Products Home >> Adaptive Optics >> Deformable Mirrors>> overview >> features >> Protective Window with 6o Wedge and Broadband AR Coating (400 - 1100 nm)" what does the iterm AR stand for? |
Figure 7.1 可変形状ミラーの電気インターフェイス
選択する際の検討事項
収差を補正して、平坦な波面を実現するためには、可変形状ミラーの表面形状が収差プロファイルにフィットし、また、収差振幅の半分であるのが適切です。 ただし、以下の要因により、可変形状ミラーが実際に補正できる波面の範囲は制限されます。
- アクチュエータのストロークは、ダイナミックレンジ(つまり、アクチュエータの最大変位)と同じ意味で、通常ミクロン単位で測定されます。 アクチュエータのストロークが不十分な場合、補正できる収差振幅は制限され、制御ループは収束せずに、性能は下がってしまいます。
- アクチュエータの数は、波面制御システムの自由度、すなわちミラーが修正できる波面の複雑性を制限します。
- 急速に変化する波面を修正するには、可変形状ミラーのスピードは重要です。ヒステリシスを示すミラーの場合、電圧の変化を正しく計算して任意の変位量を得るためには制御ソフトウェアが必要ですが、これによりミラーのスピードは遅くなります。
- 対応する光パワーもミラーのコーティングやアクチュエータの設計により異なります。当社のミラーでは、ピエゾ素子型可変形状ミラーはMEMSシステムに比べて対応する光パワーが大幅に高くなります[銀コーティング付きのタイプでは最大1 J/cm²(1064 nm、10 ns、10 Hz、Ø10 mm)]。カスタムコーティングを施し、レーザ共振器内で動作させることも可能です(詳細は当社までお問い合わせください)。
- ピエゾ素子型可変形状ミラーにおけるヒステリシスとは、任意の電圧値におけるミラーセグメントの変位量が、高い電圧値から近づけた場合と低い電圧値から近づけた場合で異なることを意味しています。 ピエゾ素子型可変形状ミラーではヒステリシスが大きくなるのに対し、MEMS型可変形状ミラーでは本質的にヒステリシスはありません。
上記の要因のうちの初めの3つは可変形状ミラー自体の物理的な制限によるものですが、最後の要因であるスピードについては、制御ソフトウェアとミラー自体の物理的な制限の両方またはそのどちらかによるものです。 また、可変形状ミラーコーティングとミラーヘッドに取り付けられた保護ウィンドウの波長範囲は、用途に適している必要があります。
比較
当社のピエゾ素子型可変形状ミラーはストロークが大きいため、MEMS型可変形状ミラーと比べてより大きい波面偏差を修正可能です。 しかし、ミラー内のアクチュエータの密度が下記掲載のMEMS型のMulti-DM(可変形状ミラー)より低いため、Multi-DMほどの細かな空間スケールの波面偏差を補正することはできません。
大きな振幅と小さな空間スケールの波面歪みの両方を補正する場合には、ピエゾ素子型とMEMS型を連携させて使用することをご検討ください。これは 論文で ウーファーツイータ構成として一般的です。 ピエゾ素子型可変形状ミラーは、チップ、チルト、ならびに低次(低空間周波数)の 波面歪みを補正し、MEMS型可変形状ミラーは、高次(高空間周波数)の波面歪みを補正します。 一般的に、低次の波面歪みの大きさは高次の波面歪みよりも大きくなっています。 したがって、アクチュエータ数が少なく変位量の大きいピエゾ素子型可変形状ミラーと、アクチュエータ数が多く変位量の小さいMEMS型可変形状ミラーの組合せは、ウーファーツイータ構成への利用に適しています。
| Deformable Mirror Comparison | |||||||
|---|---|---|---|---|---|---|---|
| Deformable Mirror Type | MEMS-Based from Boston Micromachines | Piezoelectric | |||||
| Item # | DM140A-35-UP01 | DM140A-35-P01 | DM140A-35-UM01 | DMP40-F01 DMP40/M-F01 | DMP40-P01 DMP40/M-P01 | DMH40-F01 DMH40/M-F01 | DMH40-P01 DMH40/M-P01 |
| Actuator Array | 140 Actuators in a 12 x 12 Array | 40 Piezoceramic Disk Segments in a Circular Keystone Array (Elements 1 - 24 Inside Pupil Diameter, Elements 25 - 40 Outside Pupil Diameter) | |||||
| Actuator Stroke | 3.5 µm per Actuator | Defocusa: ±6.5 µm Astigmatisma: ±6.8 µm Comaa: ±2.5 µm Trefoila: ±2.4 µm Tetrafoila: ±2.1 µm Secondary Astigmatisma: ±1.1 µm Third Order Spherical Aberrationa: ±1.0 µm | Defocusa: ±17.6 µm Astigmatisma: ±18.4 µm Comaa: ±6.8 µm Trefoila: ±6.5 µm Tetrafoila: ±5.7 µm Secondary Astigmatisma: ±3.0 µm Third Order Spherical Aberrationa: ±2.7 µm | ||||
| Tip/Tilt | N/A | 3 Spiral Arms for ±2.0 mrad of Tip/Tilt | N/A | ||||
| Pupil Dimensions | 4.4 mm x 4.4 mm | Ø10.0 mm | Ø14.0 mm | ||||
| Mirror Coating (Click for Plot) | Aluminum | Protected Silver | Gold | UV-Enhanced Aluminum | Protected Silver | UV-Enhanced Aluminum | Protected Silver |
| Mirror Wavelength Range | 400 - 1100 nm | 400 - 1100 nm | 600 - 1100 nm | 250 - 450 nm (Ravg > 89%) | 450 nm - 2 µm (Ravg > 97.5%), 2 - 20 µm (Ravg > 96%) | 250 - 450 nm (Ravg > 89%) | 450 nm - 2 µm (Ravg > 97.5%), 2 - 20 µm (Ravg > 96%) |
| Hysteresis | None | 15% Typical, 25% Max | 20% Typical, 25% Max | ||||
| Response Time | < 100 µs (~3.5 kHz) Mechanical Response Time (10% - 90%) | 0.5 ms (Full Stroke) Mirror Response Time 5 ms (Full Stroke) Tip/Tilt Response Time | 0.5 ms (Full Stroke) Mirror Response Time | ||||
| Frame Rate (Max) | 8 kHz (34 kHz Bursts) | 4 kHz via USB 2.0 (Over Entire Voltage Range) | |||||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}