 Products Home
Products Home電動ピッチ&ヨープラットフォーム(ステージ)
- Low Profile: 25 mm (0.98") Platform Height
- ±2.5° Pitch and ±4.0° Yaw
- Load Capacity: 2.0 kg (4.4 lbs)
- DC Servo Actuators
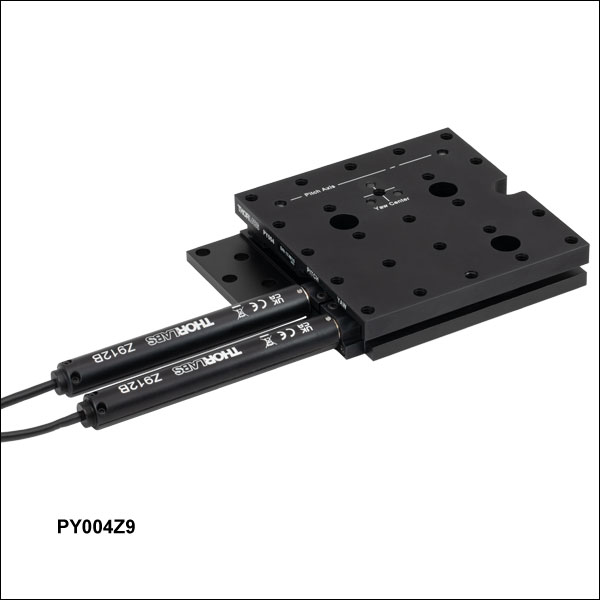
PY004Z9
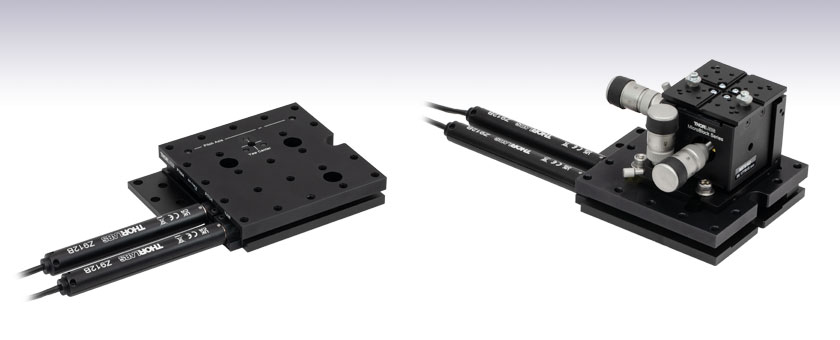
High-Load Pitch and Yaw Stage with DC Servo Actuators
Application Idea
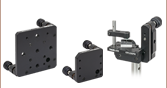
3-Axis Flexure Stage Mounted Directly to a PY004Z9 High-Load Pitch and Yaw Stage for High-Precision 5-Axis Control









Please Wait
| Key Specificationsa | ||
|---|---|---|
| Adjustment Range | Pitch: ±2.5° Yaw: ±4.0° | |
| Minimum Achievable Incremental Movement | Pitch: 7.13 arcsec Yaw: 15.71 arcsec | |
| Bidirectional Repeatability | Pitch: 27.85 arcsec Yaw: 4.75 arcsec | |
| Crosstalk | < 0.05° (3 arcmin) | |
| Maximum Horizontal Load Capacitya,b | 2.0 kg (4.4 lbs) | |
| Maximum Vertical Load Capacityc | Load Distance from Top Platform | Max Load |
| 30.0 mm (1.18") | 1.8 kg (4.0 lbs) | |
| 50.0 mm (1.97") | 1.1 kg (2.4 lbs) | |
| 80.0 mm (3.15") | 0.7 kg (1.5 lbs) | |
| Deck Height | 25.0 mm (0.98") | |
| Bushing Diameter | 9.5 mm (3/8") | |
| Included Drives | Z912Bd DC Servo Motors (Qty. 2) | |
Click to Enlarge
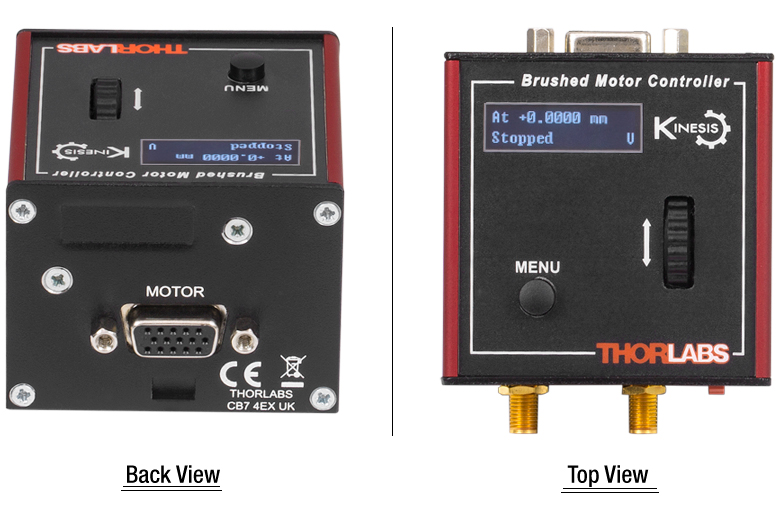
Figure 1.1 K-Cube® DCサーボモーターコントローラ(2個必要です)
特長
- 付属のDCサーボアクチュエータを介してピッチ&ヨーを電動調整
- 25.0 mm間隔のM6タップ穴24個付き
- 直線移動ステージに回転自由度を追加可能
- デッキ高:25.0 mm
- 黒色アルマイト加工
この自動ステージは、±2.5°のピッチ調整および±4.0°のヨー調整が可能です。荷重2.0 kgまでのレーザやカメラ、そして3軸ステージなどを取り付けられるよう設計されています。実際の最大耐荷重は、プラットフォームへ加わる荷重の位置によって異なります(詳細は「仕様」タブをご参照ください)。112.0 mm x 115.0 mmのトッププラットフォームには、24個のM6ネジ穴が25 mm間隔で開けられています。
ピッチ&ヨープラットフォームのベースには8つの貫通穴が開いており、光学テーブルやブレッドボードに取り付けることができます。貫通穴によりユニットのタップ穴が光学テーブルの穴または穴の中間位置と一致します。ユニットにテーブルクランプCL6(別売り)2個を使用すればどの位置にも固定可能です。
Click to Enlarge
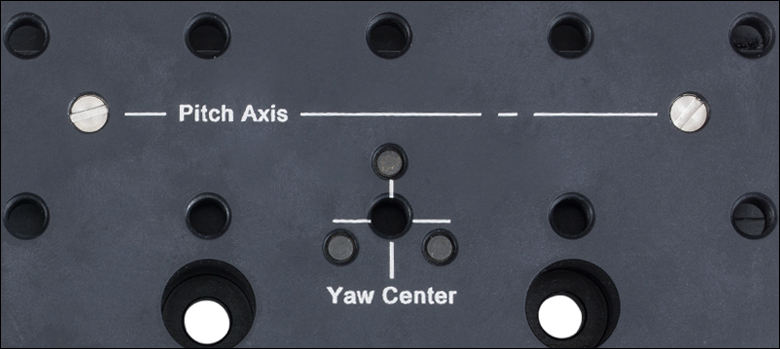
Figure 1.2 プラットフォームにはピッチ軸とヨー中心が刻印されており、クロストークを最小限に抑えるのに役立ちます。
付属のアクチュエータならびに対応可能アクチュエータ
付属する2つのDCサーボアクチュエータZ912Bのケーブルの長さは485 mmです。最小移動量はピッチで7.13 arcsec、ヨーで15.71 arcsecです。このアクチュエータは、Ø3/8インチ(Ø9.5 mm)バレルに付いたフレクシャークランプを用いることによって移動ステージに取り付けられています。必要であればZ912Bの代わりにステッピングモータ用アクチュエータや手動マイクロメータなど、Ø3/8インチ(Ø9.5 mm)バレル付きの手動または電動アクチュエータが使用可能です。
コントローラ
当社ではDCサーボコントローラKDC101(下記参照)を2個ご使用になることをお勧めします(各軸に1個ずつ)。 最新のKinesisソフトウェアはこちらからダウンロードいただけます。KDC101をプラットフォームPY004Z9/Mで使用するには、ファームウェアバージョンが2.2.8以降、およびKinesisソフトウェアバージョンが1.14.44以降であることが必要です。詳細については「Kinesis ソフトウェア」および「Kinesis チュートリアル」タブをご覧ください。
PY004Z9(/M)の仕様
| Specification | Value | |
|---|---|---|
| Pitch and Yaw Adjustment | ||
| Adjustment Range | Pitch: ±2.5° Yaw: ±4.0° | |
| Minimum Achievable Incremental Movement | Pitch: 7.13 arcsec Yaw: 15.71 arcsec | |
| Bidirectional Repeatability | Pitch: 27.85 arcsec Yaw: 4.75 arcsec | |
| Maximum Velocity | Pitch: 3600 arcsec/s Yaw: 3600 arcsec/s | |
| Maximum Acceleration | Pitch: 3600 arcsec/s2 Yaw: 3600 arcsec/s2 | |
| Crosstalk | < 0.05° (3 arcmin) | |
| Stage | ||
| Maximum Horizontal Load Capacitya,b | 2.0 kg (4.4 lbs) | |
| Maximum Vertical Load Capacityc | Load Distance from Top Platform | Max Load |
| 30.0 mm (1.18") | 1.8 kg (4.0 lbs) | |
| 50.0 mm (1.97") | 1.1 kg (2.4 lbs) | |
| 80.0 mm (3.15") | 0.7 kg (1.5 lbs) | |
| Deck Height | 25.0 mm (0.98") | |
| Bushing Diameter | 9.5 mm (3/8") | |
| Body Construction | Black-Anodized Aluminum | |
| Actuator | ||
| Included Drives | Z912Bd (Qty. 2) | |
| Motor Type | DC Servo Motor | |
| Maximum Phase to Phase Resistance | 33.0 Ω | |
| Maximum Phase to Phase Inductance | 0.6 mH | |
| Operating Temperature Range | 41° to 104° F (5° to 40° C) | |
| Cable Length | 485.0 mm (19.09") | |
| Connector | D-Type Male | |
| Compatible Controller | KDC101 | |
| Physical | ||
| Dimensions (L x W x H)e | 9.19" x 4.53" x 0.98" (233.3 mm x 115.0 mm x 25.0 mm") | |
| Weight | 0.87 kg (1.91 lbs) | |
水平面設置時許容荷重
Click to Enlarge
Figure 2.1 PY004Z9(/M)の最大耐荷重が異なる領域2か所を示しています。
Z912Bのコネクターピン配列
Dタイプオス型
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Ground (Limit and Vcc) | 9 | Resistive Identification |
| 2 | Forward Limit | 10 | +5 VDC |
| 3 | Reverse Limit | 11 | Encoder Channel A |
| 4 | Reserved for Future Use | 12 | Reserved for Future Use |
| 5 | Motor (-) | 13 | Encoder Channel B |
| 6 | Reserved for Future Use | 14 | Pin 2 Ident EEPROM |
| 7 | Motor (+) | 15 | Pin 1 Ident EEPROM |
| 8 | Reserved for Future Use |
ソフトウェア
Kinesisバージョン1.14.53
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Figure 58A KinesisソフトウェアのGUI画面
当社のKinesisソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cube®など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークやAPIの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
Kinesisソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内Kinesis駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
| Posted Comments: | |
user
(posted 2025-01-23 09:13:29.95) Is there a possibility that the motorized pitch and yaw stage moves in degrees using the K-Cube. We are not sure how to convert the mm we see on the Kinesis GUI to angle? Could you please help with that? tschofield
(posted 2025-01-31 10:25:51.0) Thank you for reaching out. Under ‘Actuator’ in the bottom right of the red box in Kinesis GUI, you can select PY004Z9(/M) Pitch/Yaw. This will change the units in the Kinesis GUI to the more appropriate angle in degrees rather than distance in mm. Jesse Ahlquist
(posted 2022-09-02 09:52:07.84) Hi,
This product is great; however, something we came across in a recent design review for our specific application is whether the motorized actuators must mount in this specific orientation with respect to stage movement.
More specifically - our application would benefit from the pitch and raw actuators ability to mount vertically such that they are perpendicular rather than parallel with the pitch axis.
Is something like this a possibility? Perhaps there is an alternative product which satisfies this need?
Thanks!
Jesse cwright
(posted 2022-09-06 10:51:33.0) Response from Charles at Thorlabs: Thank you for contacting us. We are happy you have found the product useful and welcome the feedback. Unfortunately it is not possible to adapt this stage such that the adaptors are vertical and we do not currently have another stage which could serve as an alternative with this configuration. chf7
(posted 2018-09-18 14:17:29.77) Is this product vacuum compatible? AManickavasagam
(posted 2018-09-19 04:40:01.0) Response from Arunthathi @ Thorlabs: Thanks for your query. PY004Z8 is not vacuum compatible as the stage is made of Aluminium and it is anodised. Also, the grease used is not suitable to use in vacuum conditions. |
")
 ズーム
ズーム
Click to Enlarge
Figure G1.1 3軸ポジショナをプラットフォームPY004Z9(/M)に取り付けることで精密な5軸制御が可能になるため、ファイバーアライメントをはじめとするさまざまな用途にご使用いただけます。
- DCサーボアクチュエータによる大きな調整幅
- ピッチ: ±2.5°
- ヨー: ±4.0°
- 最大耐荷重: 2.0 kg
- コントローラならびに電源は別売
当社の自動ステージ、ピッチ&ヨープラットフォームPY004Z9/Mは、±2.5°のピッチ調整および±4.0°のヨー調整が可能です。24個のM6タップ穴が並んでいるので、様々なオプトメカニクス系に簡単に組み込むことができます。最大耐荷重は2.0 kgで、レーザやカメラ、そして3軸プラットフォームとの使用に適しています。このステージの操作にはコントローラが2個と電源が必要です。当社ではKinesis®DCサーボモーターコントローラKDC101と電源KPS201のご使用をお勧めいたします。詳細については下記をご覧ください。

 ズーム
ズーム Click to Enlarge
Click to EnlargeK-Cube®モジュールの取り付けられたUSBコントローラーハブKCH601(別売り)
- 上面パネルに電動ステージやアクチュエータ制御用の速度ホイールとデジタル表示器
- 2つの双方向トリガーポート(外部機器からの信号読み取りや外部機器の制御用)
- 付属のUSBケーブルでPCに接続可能
- Kinesisソフトウェアに完全対応
- コンパクトな装置サイズ: 60.0 mm x 60.0 mm x 49.2 mm
- 電源は付属しません(下記参照)
当社のブラシ付きDCモーターコントローラK-Cube®KDC101では、1台のモータの回転軸を手動またはPCで制御できます。上面のコントロールパネルの速度ホイールを用いて、4段階の速度での前後両方向へのジョグ動作と位置のプリセットが可能です。上面パネルのデジタル表示器のバックライトは、メニューを選択することで暗くしたり消灯したりすることができます。ユニット前面には双方向性のトリガーポートが2つあり、5 Vの外部ロジック信号を読み込んだり、5 Vロジック信号を出力して外部機器を制御したりすることができます。それらの設定は、それぞれのポートごとに独立に行うことができます。
このユニットはKinesisソフトウェアパッケージに完全対応しています。 XAソフトウェアは、コントローラKDC101に対しては完全サポートしていますが、ステージPY004Z9/Mに対しては現時点ではサポートできていません。そのため、Kinesisソフトウェアパッケージをご使用いただく必要がありますのでご注意ください。XAがサポートしている製品の一覧はこちらからご覧いただけます。詳細は「Kinesisソフトウェア」タブをご参照ください。
このコントローラには電源が付属しませんのでご注意ください。対応する電源については下記の「電源」をご参照ください。詳細はDCサーボモーターコントローラKDC101の製品紹介ページをご覧ください。

 ズーム
ズーム
Click to Enlarge
Figure 780A 電源ユニットKPS201(日本国内向けアダプタと共に発送します)
- 電源(単体)
- KPS201: K-Cube®、T-Cubes™ 用、3.5 mmジャック付き
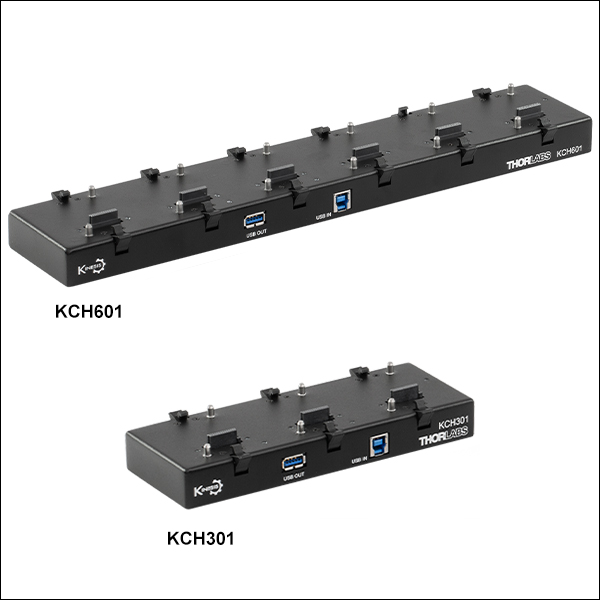
- 電源供給と通信機能を備えたUSBコントローラハブ
- KCH301: 3台までのK-CubeまたはT-Cube用
- KCH601: 6台までのK-CubeまたはT-Cube用
電源KPS201の出力電圧は+15 VDC、最大電流は2.66 Aで、3.5 mmジャックで1台のK-CubeまたはT-Cubeに電力を供給します。標準的な壁コンセントに接続して使用します。
USBコントローラーハブKCH301およびKCH601は次の2つの機能を有しています。1つはハブ機能で、最大3台(KCH301)または6台(KCH601)までのK-CubeまたはT-Cubeをサポートします。もう1つは電源機能で、標準的な壁コンセントに接続するだけで必要な電力の供給を行います。ただし、ハブが供給できる最大電流は10 Aです。お使いになる全Cubeの必要電流が合計で10 A以上にはならないことをお確かめください。 また、このハブに取り付けられたすべてのT-CubeやK-Cubeに対して、1本のUSBケーブルで接続することができます。
USBコントローラハブの詳細は、製品ページをご参照ください。

 ズーム
ズーム{kind=link}
延長ケーブルPAA632の長さは2.5 mで、コネクタは当社の電動式アクチュエータ製品すべてに使用できる15ピンD‑サブコネクタです。 オス型のケーブル端はコントローラに、メス型はモータに接続します。