 Products Home
Products Homeダイレクトドライブ回転ステージ
- 180 rpm (3 Hz) Velocity
- 5 kg Load Capacity
- Max Axial Wobble 60 µrad
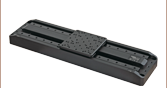
NR360SP4
Grooved Adapter Plate
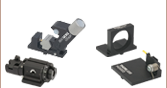
NR360SP9
Threaded Adapter Plate
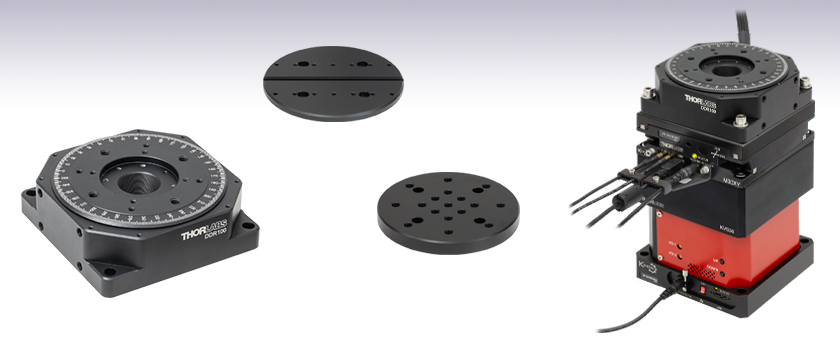
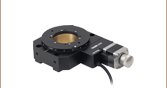
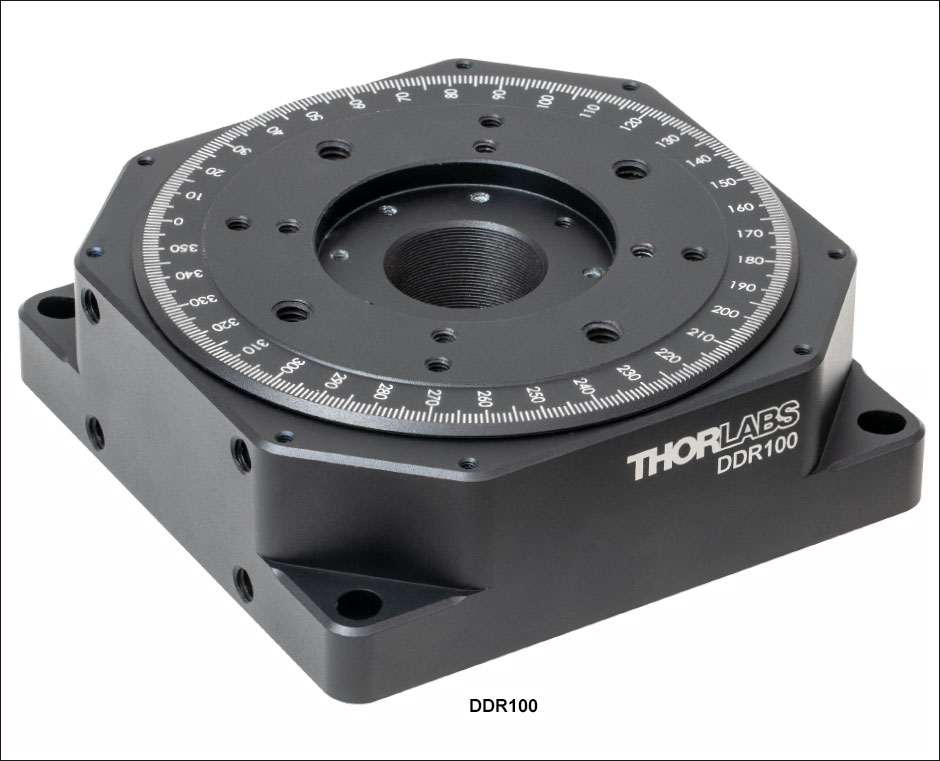
DDR100
SM1-Threaded Center Hole
Adapter Plate Included
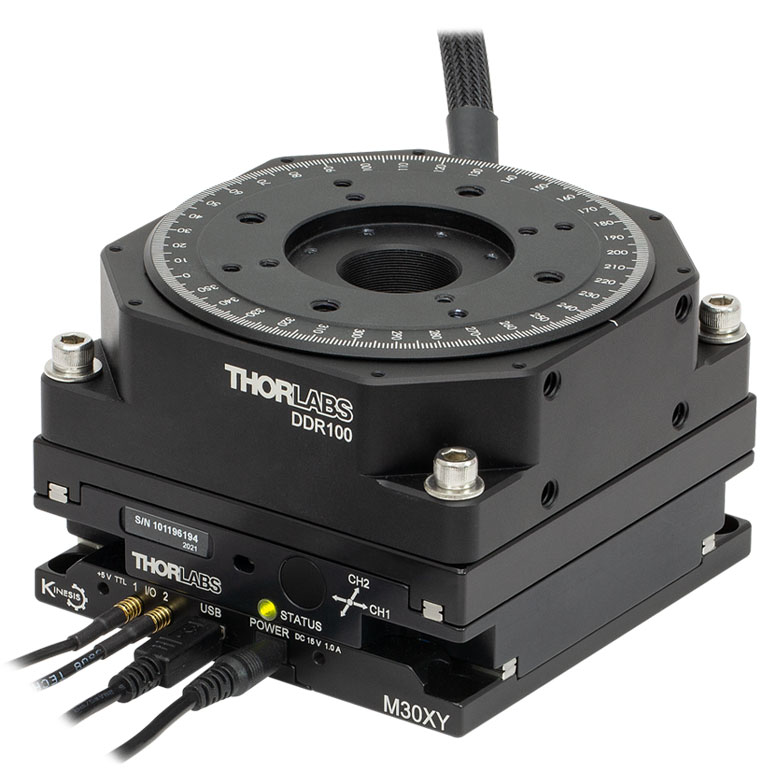
Application Idea
The DDR100 Rotation Stage can be
combined with the M30XY XY Stage and
the KVS30 30 mm Vertical Servo Stage
for an XYZ-yaw configuration.









Please Wait
| Key DDR100 Specificationsa | |
|---|---|
| Travel Range | 360° Continuous |
| Velocity (Max) | 180 rpm (3 Hz) |
| Max Wobble (Axial) | 60 µrad |
| Bidirectional Repeatability | 60 µrad |
| Horizontal Load Capacity (Max)b | 5.0 kg |
| Vertical Load Capacity (Max)b | 2.0 kg (Mounted Centrally) |
| Min Achievable Incremental Movement | 70 µrad |
| Cable Length | 3.0 m (9.8') |
| Recommended Controllera | Benchtop: BBD30x; Rackmount: RBD201, MBD602 |
| Stage Dimensions (L x W x H) | 115 mm x 115 mm x 40 mm (4.53" x 4.53" x 1.58") |
特長
- 360°連続回転
- 最大180 rpmの高速回転
- 40 mmの薄型
- ブラシレスDCサーボモーターアクチュエータ内蔵
- 高品質で精密設計のベアリング
- SM1レンズチューブや30 mmケージシステムを取り付け可能
- アダプタープレートNR360SP4/MおよびNR360SP9/Mが取り付け可能
薄型ダイレクトドライブ回転ステージDDR100/Mは、5 kgまでの荷重に対して、分解能2 µrad、最大回転速度180 rpmで連続回転を行うことができます。SM1ネジ付きの中央穴はステージ本体を貫通しており、光路として利用できます。
このステージには、3相ブラシレスDCモータが内蔵されています。これにより機械的な動力伝達機構がなく、高い再現性、剛性、信頼性が実現しています。また、磁気コギングによるトルクリップルもなくなり、低速でも安定に動作します。多数の磁極は大きなトルク(0.7 N•m)を生み出します。高分解能のエンコーダを回転ステージに直接取り付けることにより、高い精度と再現性が得られます。一方、ベアリングの精密性や製造過程における精度が高くなることにより、軸の角度偏差と偏心は非常に低くなります(それぞれ60 µrad、6 µm)。また1°単位で刻印されているバーニヤ目盛は粗動位置決めの目安となります。
ステージは作業面に対し水平に取り付けるか、Ø25 mmポストに垂直に取り付けることができます(右図参照)。また、直角ブラケットAP90RL/MまたはVB01/Mを用いて取り付けることも可能です。さらに、移動ステージDDS300/MやDDS600/Mに直接取り付けることもできます。上面プレートには、SM1ネジ付き貫通穴があり、Ø25.4 mm(Ø1インチ)の光学素子およびSM1シリーズの製品に対応しています。上面の回転面および非回転面、および背面には30 mmケージロッドを取り付けるためのタップ穴があります。
コントローラ
当社ではこのステージの駆動用に、1~3チャンネルのベンチトップ型ブラシレスDCモーターコントローラ BBD30x (別売り、下記参照)をお勧めいたします。どのコントローラもS字加減速を設定できるので、振動や衝撃の無い、高速でスムーズな位置決めが可能です。高速動作(数百mm/s)で高いエンコーダ分解能(50 nm)が求められるモーションコントロール用途に適しています。最新のデジタルとアナログ技術とともに広帯域幅およびハイパワーサーボコントロール回路を採用しています。コントローラは、既存システムに簡単に組み込むためのKinesisまたはAPTソフトウェアと共に発送されます。ブラシレスDCモーターコントローラの製品概要については下記をご覧ください。またはこちらをクリックして詳しい製品説明をご参照ください。
当社では19インチラック用のラックマウント型コントローラRBD201や、19インチラック型モーションコントロール用シャーシMMR60x用に設計されたコントローラーモジュールMBD602もご用意しております。これらのコントローラは、ダイレクトドライブ型リニア移動ステージDDR100/Mに対応しており、使用することで多軸モータ制御による複雑なシステムのカスタマイズが可能です。
アダプタープレート
アダプタープレートはステージの回転プラットフォームに固定することができます。溝付きアダプタープレートNR360SP4/Mを用いれば、ステージをファイバ入射システムシリーズの製品と一緒にお使いいただけます。ネジアダプタープレートNR360SP9/Mには、17個のM6取付け穴と4個のM4用ザグリ穴があり、さまざまなデバイスの取付が可能です。詳細については下記ご参照ください。
ジョイスティック
遠隔での位置決め制御用に、2軸ジョイスティックMJC2と3軸ジョイスティックMJC3をご用意しています。詳細は下記をご覧ください。なお2つの移動ステージを同時に制御するときには多軸のコントローラが必要です。
| Item # | DDR100(/M) |
|---|---|
| Travel Range | 360° Continuous |
| Velocity (Max) | 180 rpm (3 Hz) |
| Acceleration (Max)a | 7200°/s2 at 0.5 kg (1.1 lbs) Load 1800°/s2 at 2.0 kg (4.4 lbs) Load |
| Bidirectional Repeatability | 60 µrad |
| Backlashb | N/A |
| Encoder Resolution | 2.0 µrad (0.0001°) |
| Min Achievable Incremental Movement | 70 µrad |
| Recommended Loadc | 2 kg (4.4 lbs) |
| Horizontal Load Capacity (Max)c | 5.0 kg |
| Vertical Load Capacity (Max)c | 2.0 kg (Mounted Centrally) |
| Absolute On-Axis Accuracy | 250 µrad |
| Max Burst Torque (1 Sec) | 0.7 N•m |
| Continuous Torque | 0.5 N•m |
| Settling Time | 200 ms Typical |
| Velocity Stability | 0.5% |
| Max Wobble (Axial) | 60 µrad |
| Limit Switches | None |
| Central Aperture | SM1 Threaded (1.035"-40) |
| Adapter Plate Mounting Holes | 4-40 (8 places) |
| Operating Temperature Ranged | 5 to 40 °C (41 to 104 °F) |
| Motor Type | Brushless DC Rotary Motor |
| Cable Length | 3 m (9.8') |
| Dimensions | 115 mm x 115 mm x 40 mm (4.53" x 4.53" x 1.58") |
| Weight (Excluding Cables) | 2 kg (4.4 lbs) |
| Item # | BBD301 | BBD302 | BBD303 |
|---|---|---|---|
| Number of Channels | 1 | 2 | 3 |
| Drive Connector | 8 Pin DIN, Round, Female | ||
| Feedback Connector | 15-Pin D-Type, Female | ||
| Brushless Continuous Output | 2.5 A per Channel, 5 A Max All-Channel Total Output | ||
| Brushless Peak Output | 4.0 A per Channel, 5 A Max All-Channel Total Output | ||
| PWM Frequency | 40 kHz | ||
| Operating Modes | Position and Velocity | ||
| Control Algorithm | 16-Bit Digital PID Servo Loop with Velocity and Acceleration Feed Forward | ||
| Velocity Profile | Trapezoidal/S-Curve | ||
| Position Count | 32 Bit | ||
| Position Feedback | Incremental Encoder | ||
| Encoder Bandwidth | 2.5 MHz (10 M Counts/sec) | ||
| Encoder Supply | 5 V | ||
| AUX Control Connector | 37-Pin D-Type Female (User Digital IO, 5 V O/P) | ||
| Front Panel Display | 4.3" Full-Color LCD, 480 x 272 Pixels | ||
| Input Power Requirements | 250 VA Voltage: 100 to 240 VAC Frequency: 47 to 63 Hz Fuse: 3.15 A | ||
| Dimensions (W x D x H) | (7.87" x 9.02" x 4.28") | (9.84" x 10.99" x 4.28") | (13.78" x 10.99" x 4.28") |
| Mass (Weight) | 1.20 kg (2.65 lbs) | 1.70 kg (3.75 lbs) | 2.20 kg (4.85 lbs) |
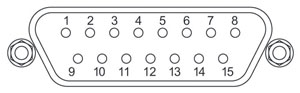
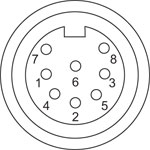
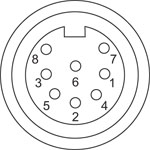
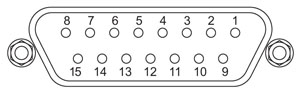
ステージDDR100/Mのピン配列
フライングリードにはオス型15ピンD型とオス型8ピン円形DINコネクタが付いております。ピンの詳細については下記をご覧ください。
フィードバックコネクタ
モータードライブコネクタ
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Used | 9 | Ground |
| 2 | Ground | 10 | Limit Switch + |
| 3 | Not Used | 11 | Limit Switch - |
| 4 | Enconder Index - | 12 | Encoder Index + |
| 5 | Encoder Phase B - | 13 | Encoder Phase B + |
| 6 | Encoder Phase A - | 14 | Encoder Phase A + |
| 7a | 5 V | 15 | Not Used |
| 8a | 5 V |
| Pin | Description |
|---|---|
| 1 | Motor Phase V |
| 2 | Ground |
| 3 | Thermistor (Not Used) |
| 4 | Motor Phase U |
| 5 | Stage ID |
| 6 | Ground |
| 7 | Motor Phase W |
| 8 | Enable |
BBD301、BBD302、BBD303のピン配列
モータードライバ
DINコネクタ、メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase V | 5 | Stage ID |
| 2 | GND | 6 | GND |
| 3 | Temp. Sensor (Not Used) | 7 | Motor Phase W |
| 4 | Motor Phase U | 8 | Enable |
フィードバック
D型コネクタ、メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Not Connected | 11 | Limit Switch - |
| 4 | Index - | 12 | Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7a | 5 V | 15 | Not Connected |
| 8a | 5 V |
ハンドセット
Mini DINコネクタ、メス
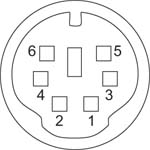
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input) | 4 | Supply Voltage for Handset 5 V |
| 2 | Ground | 5 | TX (Controller Output) |
| 3 | Ground | 6 | Ground |
AUX I/O
D型コネクタ、メス

| Pin | Description | Pin | Description | Pin | Description | Pin | Description |
|---|---|---|---|---|---|---|---|
| 1 | RS232 TX | 11 | User Digital O/P 11+ | 21 | +5 V | 31 | User Digital O/P 4+ |
| 2 | RS232 RX | 12 | User Digital O/P 10- | 22 | User Digital I/P 3 | 32 | User Digital O/P 4- |
| 3 | Ground | 13 | User Digital O/P 10+ | 23 | User Digital I/P 2 | 33 | User Digital O/P 5+ |
| 4 | Differential I/P 2+ | 14 | User Digital O/P 9- | 24 | User Digital I/P 1 | 34 | User Digital O/P 5- |
| 5 | Differential I/P 2- | 15 | User Digital O/P 9+ | 25 | User Digital I/P 0 | 35 | User Digital O/P 6+ |
| 6 | Differential I/P 1- | 16 | User Digital O/P 8- | 26 | User Digital O/P 0 | 36 | User Digital O/P 6- |
| 7 | Differential I/P 1+ | 17 | User Digital O/P 8+ | 27 | User Digital O/P 1 | 37 | Ground |
| 8 | User Digital O/P 12- | 18 | User Digital O/P 7- | 28 | User Digital O/P 2 | - | - |
| 9 | User Digital O/P 12+ | 19 | User Digital O/P 7+ | 29 | User Digital O/P 3 | ||
| 10 | User Digital O/P 11- | 20 | +5 V | 30 | Ground |
USB
USB Type B、メス
I/O
BNCコネクタ、メス
5 V TTL
注:APTソフトウェアは現状、BBD300シリーズコントローラを使用した動作の同期およびPID設定をサポートしていません。
当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.47
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisまたはAPTベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内KinesisまたはAPT駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
| Posted Comments: | |
Klaus Bartl
(posted 2021-10-29 07:32:33.13) Ist ist also possible to drive the DDR100 by the KBD101 Servo Controller? If yes, what's the max. burst torque when using the KBD101? cwright
(posted 2021-11-04 11:09:04.0) Response from Charles at Thorlabs: Thank you for your query. The only controllers capable of driving the DDR100 are the BBD series. The KBD101 will not recognise the unit. Henrik Madsen
(posted 2020-04-03 06:21:55.75) What is the max eccentricity of the stage in terms of µm? DJayasuriya
(posted 2020-04-08 03:57:25.0) Response from Charles at Thorlabs: Thank you for your inquiry. We don't have a published spec for max eccentricity but we will get in touch with you directly to help with your application. user
(posted 2019-12-16 07:12:50.777) Hi,
I have a Thorlabs DDR100/M Direct Drive Rotation Stage and a BBD202 controller. It is used at an angular velocity of 8degrees/second and every 12 months I want to make sure the angular velicity remains at this speed. How do I best calibrate the system? cwright
(posted 2019-12-17 09:49:39.0) Response from Charles at Thorlabs: Hello Daniel, the stage includes a high resolution encoder and should not require calibration. The correct speed should be maintained unless there is a fault with the stage/controller. I will reach out to you directly to discuss your concerns. benjamin.judkewitz
(posted 2017-12-30 20:53:31.697) Can you please let me know what the maximum small-angle rotation frequency is? For example, we would like to rotate +/-5 deg at up to 100 Hz sinusoidal rotation angle. rmiron
(posted 2018-01-04 09:15:08.0) Response from Radu at Thorlabs: According to the specifications we posted on the website, the maximum frequency for sinusoidal rotation over that angular range is 6Hz for a 500g load and 3Hz for a 2kg load. A lesser weight would allow for a higher frequency, but without additional test data, it is difficult to say what the absolute maximum frequency would be. I will contact you directly in order to check whether we have any stage that can address your requirements. |
回転マウント&回転ステージのセレクションガイド
当社では手動式および電動式の回転マウントと回転ステージを豊富にご用意しております。回転マウントの内孔はØ12 mm~Ø12.7 mm(Ø1/2インチ)、Ø25 mm~Ø25.4 mm(Ø1インチ)、またはØ50 mm~Ø50.8 mm(Ø2インチ) の光学素子取付け用に設計されております*。また回転ステージには、様々な部品やシステムが取り付けられるようにタップ穴が配置されております。電動式は、DCサーボモータ、2相ステッピングモータ、あるいはElliptec™共振ピエゾモータにより駆動されます。いずれも360°の連続回転が可能です。
*下表のマウントは、Ø12.7 mm、Ø25.4 mm、Ø50.8 mmの光学素子に対して最適設計されています。Ø12.0 mm、Ø25.0 mm、Ø50.0 mmなどの少し小さい光学素子に対してもご使用いただけますが、光学素子の偏心が重要ではない用途でのご使用をお勧めします。
手動回転マウント
| Rotation Mounts for Ø1/2" Optics | |||||||
|---|---|---|---|---|---|---|---|
| Item # | MRM05(/M) | RSP05(/M) | CRM05 | PRM05(/M)a | SRM05 | KS05RS | CT104 |
| Click Photo to Enlarge |  |  |  |  |  |  |  |
| Features | Mini Series | Standard | External SM1 (1.035"-40) Threads | Micrometer | 16 mm Cage-Compatible | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Compatible with 30 mm Cage Translation Stages and 1/4" Translation Stagesb |
| Additional Details | |||||||
| Rotation Mounts for Ø1" Optics | ||||||||
|---|---|---|---|---|---|---|---|---|
| Item # | RSP1(/M) | LRM1 | RSP1D(/M) | DLM1(/M) | CLR1(/M) | RSP1X15(/M) | RSP1X225(/M) | PRM1(/M)a |
| Click Photo to Enlarge |  |  |  |  |  |  | |  |
| Features | Standard | External SM1 (1.035"-40) Threads | Adjustable Zero | Two Independently Rotating Carriages | Rotates Optic Within Fixed Lens Tube System | Continuous 360° Rotation or 15° Increments | Continuous 360° Rotation or 22.5° Increments | Micrometer |
| Additional Details | ||||||||
| Rotation Mounts for Ø1" Optics | ||||||
|---|---|---|---|---|---|---|
| Item # | LM1-A & LM1-B(/M) | CRM1T(/M) | CRM1LT(/M) | CRM1PT(/M) | KS1RS | K6XS |
| Click Photo to Enlarge |   |  |  |  |  |  |
| Features | Optic Carriage Rotates Within Mounting Ring | 30 mm Cage-Compatiblea | 30 mm Cage-Compatible for Thick Opticsa | 30 mm Cage-Compatible with Micrometera | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Six-Axis Kinematic Mounta |
| Additional Details | ||||||
| Rotation Mounts for Ø2" Optics | |||||||
|---|---|---|---|---|---|---|---|
| Item # | RSP2(/M) | RSP2D(/M) | PRM2(/M) | LM2-A & LM2-B(/M) | LCRM2(/M) | KS2RS | K6X2 |
| Click Photo to Enlarge |  |  |  |   |  |  |  |
| Features | Standard | Adjustable Zero | Micrometer | Optic Carriage Rotates Within Mounting Ring | 60 mm Cage-Compatible | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Six-Axis Kinematic Mount |
| Additional Details | |||||||
手動回転ステージ
| Manual Rotation Stages | ||||||
|---|---|---|---|---|---|---|
| Item # | RP005(/M) | PR005(/M) | MSRP01(/M) | RP01(/M) | RP03(/M) | QRP02(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Features | Standard | Two Hard Stops | ||||
| Additional Details | ||||||
| Manual Rotation Stages | ||||||
|---|---|---|---|---|---|---|
| Item # | XRNR1(/M) | XRR1(/M) | PR01(/M) | CR1(/M) | XYR1(/M) | OCT-XYR1(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Features | Fine Rotation Adjuster and 2" Wide Dovetail Quick Connect | Fine Rotation Adjuster and 3" Wide Dovetail Quick Connect | Fine Rotation Adjuster and SM1-Threaded Central Aperture | Fine Pitch Worm Gear | Rotation and 1/2" Linear XY Translation | |
| Additional Details | ||||||
電動回転マウント&ステージ
| Motorized Rotation Mounts and Stages with Central Clear Apertures | |||||
|---|---|---|---|---|---|
| Item # | DDR25(/M) | PDR1C(/M) | PDR1(/M) | PDR1V(/M) | PDXR1(/M) |
| Click Photo to Enlarge |  |  |  |  |  |
| Features | Compatible with SM05 Lens Tubes, 16 mm Cage System, & 30 mm Cage System | Compatible with 16 mm Cage System | Compatible with SM05 Lens Tubes & 30 mm Cage System | Vacuum-Compatible; Also Compatible with SM05 Lens Tubes & 30 mm Cage System | Compatible with SM05 Lens Tubes & 30 mm Cage System |
| Additional Details | |||||
| Motorized Rotation Mounts and Stages with Central Clear Apertures | |||||
|---|---|---|---|---|---|
| Item # | K10CR1(/M) | PRM1Z8(/M)a | DDR100(/M) | ELL14 | HDR50(/M) |
| Click Photo to Enlarge |  |  | 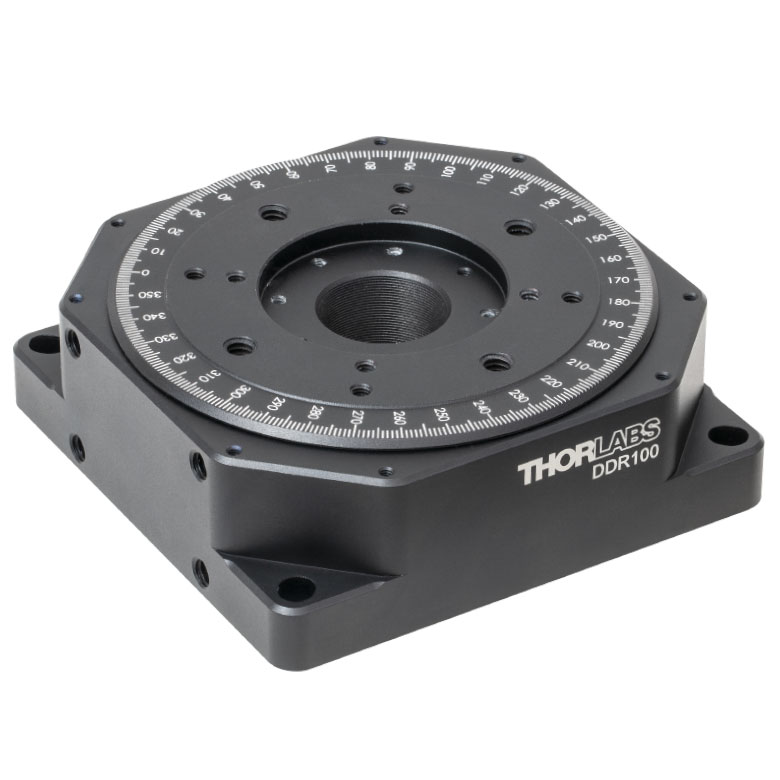 |  |  |
| Features | Compatible with SM1 Lens Tubes & 30 mm Cage System | Compatible with SM1 Lens Tubes, 16 mm Cage System, 30 mm Cage System | Compatible with SM1 Lens Tubes, Open Frame Design for OEM Applications | Compatible with SM2 Lens Tubes | |
| Additional Details | |||||
| Motorized Rotation Mounts and Stages with Tapped Platforms | ||
|---|---|---|
| Item # | PRMTZ8(/M)a | ELL18(/M)b |
| Click Photo to Enlarge |  |  |
| Features | Tapped Mounting Platform for Mounting Prisms or Other Optics | Tapped Mounting Platform, Open Frame Design for OEM Applications |
| Additional Details | ||

 ズーム
ズームステージDDR100/Mは、高速回転と高い位置精度が特長で、部品をケージ内やスキャニング、表面マッピング、レーザ溶接などのシステム内で高速回転させる必要がある用途に適しています。安定した閉ループ型制御システムとBBDシリーズのコントローラを、別売りのジョイスティック(下記参照)と併せて使用することで、正確で微細な位置決めと制御が簡単にできるようになります。
DDR100/Mには上部プレート(Central Insert)が付属します。上部プレートを取り付けると、回転ステージのSM1ネジ付き穴が塞がれてしまいますが、プレート自体にはケージロッド取り付け用のタップ穴が8個あるため、16 mmケージシステムや30 mmケージシステムを取り付けることができます。

 ズーム
ズーム- アクセサリ取付用のアダプタープレート
- キー溝付きまたはタップ穴付きから選択
- NR360SP9/M:オプトメカニクスアクセサリ用のM6タップ穴が17個
- NR360SP4/M:フレクシャーステージ用アクセサリに適合した3 mmキー溝付き
- DDR100/Mに取り付けるためのM4キャップスクリュが付属
タップ穴付きアダプタープレートNR360SP9/Mと、溝付きアダプタープレートNR360SP4/Mは、回転ステージDDR100/Mの機能を拡張できるように設計されています。NR360SP9/Mにはオプトメカニクスのセットアップを固定するためのM6タップ穴が17個あります。NR360SP4/Mには幅3 mmのキー溝が付いており、ファイバへの光結合やその他のフレクシャーステージ用アクセサリに対応できて便利です。どちらのアダプタにもM4ザグリ穴が4個あり、DDR100/Mに取り付けることができます。

 ズーム
ズーム当社では、上記のステージの制御用として、BBDシリーズブラシレスDCサーボモーターコントローラをお勧めします。コントローラはチャンネル数に応じて選択できます。単独のステージを使用する場合は、BBD301をご使用いただけます。ジョイスティックMJC2も使用する場合はBBD302をお勧めします。そのほかのアクセサリも使用する場合は、3チャンネルコントローラBBD303をお使いいただけます。3チャンネルのすべてを、ジョイスティックMJC3を介して制御できます。
S字加減速が自由に設定できるため、振動や衝撃の無い、スムーズな高速位置決めが可能です。したがって、これらのコントローラは、高速動作(数100mm/s)と高いエンコーダ分解能を必要とするモーションコントロールに適しています。このBBDシリーズコントローラは、最新のデジタルおよびアナログ技術と、高帯域で高パワーのサーボコントロール回路を使用しており、ブラシレスDCサーボモータを最大連続出力電流2.5 A (型番BBD301)または5 A (型番BBD302とBBD303)で駆動できるように設計されています。
これらのDCサーボコントローラでは、当社のKinesis®およびAPTによるコントロール&プログラミングインターフェイスをご利用いただくことができますので、自動モーションコントロールのアプリケーションに簡単に組み込むことができます。PCとのインターフェイスとして、柔軟性を高めるためにUSBとRS232の両方を備えており、付属のソフトウェア開発キット(SDK)を用いてステージのPC自動制御が可能です。SDKはWindowsで動作する全ての主要な開発言語をサポートしており、ActiveXライブラリまたは従来のダイナミックリンクライブラリ(DLL)の形式で提供されます。
USB接続のプラグアンドプレイによって簡単にPCでの操作が可能になります。多軸のモーションコントロールを行う場合でも、標準的なUSBハブを介して複数のユニットを1台のPCに接続できます。この機能と使いやすいソフトウェアを組み合わせることで、複雑な動作シーケンスを短時間でプログラムして実行することができます。詳細は、ブラシレスDCサーボモーターコントローラの製品紹介ページをご参照下さい。

 ズーム
ズーム- USB HIDプロトコルを使用した信頼性の高いジョイスティック
- ジョイスティックノブによる2軸または3軸制御
- 高速または高精度の移動を実現する2種類のモード
- 感度調整のための速度ダイヤル
- リモート手動操作が可能
- PCを用いて再プログラム可能
- 人間工学に基づいた設計
ジョイスティックMJC2およびMJC3は顕微鏡ユーザ向けに設計されており、ステージの位置決めを手動で直感的に行うことができます。MJC2にはXY制御用に2軸のジョイスティックノブ、MJC3にはXYZ制御用に3軸のジョイスティックノブが付いています。どちらのジョイスティックノブも上下左右に動かすことができますが、MJC3のジョイスティックノブでは第3軸の制御機能として時計回りまたは反時計回りにひねることができます。また、ジョイスティックには高速移動と高精度移動を切り替えるプッシュボタンと、速度制御を微調整するためのスピードダイヤルも付いています。ほとんどの用途では、コントローラに保存されたデフォルトのパラメータ設定のままですぐにお使いいただくことができ、それ以上の設定は不要です。そのような使い方をするときはホストPCに接続する必要もなく、真のリモート操作が可能です。PCを使用してパラメータを再設定したとき、それをペアリングしたコントローラにも保存できます。そのため、PCとの接続を外してもリモート操作を継続できます。
ジョイスティックMJC2およびMJC3は、当社のベンチトップ型ブラシレスDCモーターコントローラ、ラックマウント型ブラシレスDCサーボコントローラ、ラックマウント型ブラシレスDCモーターコントローラーモジュール、ステッピングモーター用コントローラに対応します。これらのコントローラやUSB HIDクラスを使うセットアップと組み合わせて使用できるように、ジョイスティックにはMini-DINポートとUSB Type-Cポートの両方が付いています。また、6ピンMini-DINプラグ-プラグケーブルとUSB 3.1 Type-A - Type-Cケーブルの2本のケーブルが付属します。USB HIDを介したジョイスティックの構成やセットアップについての詳細は、型番横の赤いアイコン( )をクリックしてマニュアルをご覧ください。
)をクリックしてマニュアルをご覧ください。