 Products Home
Products Home真空対応ピエゾ慣性アクチュエーター

- Vacuum-Compatible Down to 10-6 Torr
- 20 nm Typical Step Size
- 2 mm/minute Typical Speed
- 2.5 kg Max Axial Load Capacity
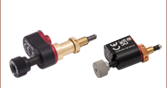
PIA13VF
13 mm Travel Range,
3/8"-40 Thread and Ø3/8" Barrel
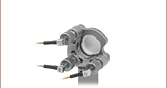
Application Idea
Three PIAK10VF Piezo Inertia Actuators can be used
in place of the 1/4"-100 adjustment screws
in our KS1TV Mirror Mount.
PIAK10VF
10 mm Travel Range,
1/4"-100 Thread and Ø3/8" Barrel








Please Wait
| Key Specificationsa | ||
|---|---|---|
| Item # | PIAK10VF | PIA13VF |
| Travel | 10 mm (0.39") | 13 mm (0.51") |
| Typical Step Sizeb,c | 20 nm | |
| Maximum Step Size | 30 nm | |
| Step Size Adjustabilityc | ≤30% | |
| Maximum Step Frequency | 2000 Hz | |
| Maximum Active Preloadd | 30 N | 25 N |
| Recommended Maximum Axial Load Capacitye | 2.5 kg (5.51 lbs) | |
| Speed (Continuous Stepping) | 2 mm/minute (Typical) < 3.5 mm/minute (Maximum) | |
| Drive Screw | 1/4"-80 Thread, Hard PVD Coated | |
| Motor Type | Piezoelectric Inertia | |
| Primary Mounting Feature | 1/4"-100 Threadf | Ø3/8" (Ø9.525 mm) Barrel |
| Vacuum Rating | 10-6 Torr | |
| Required Controllerg | KIM001 or KIM101 | |
Click for Details
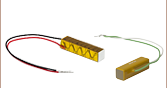
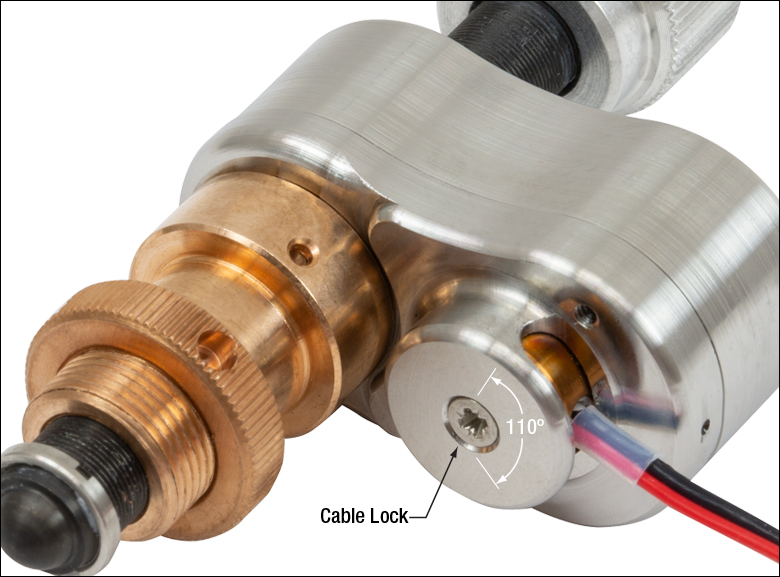
リード線の角度は最大110°まで調節可能(スペースが限られている用途で有用)。
特長
- 31.5 mm x 17.0 mm(W x H)の小型設計
- 20 nmのステップサイズ(典型値)
- アジャスターネジのノブによる手動調整が可能
- 10-6 Torrまで対応
- 最大動作電圧:125 V
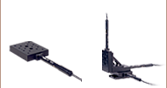
- PIAK10VF:取付け用の1/4"-80ネジでØ25.4 mm(Ø1インチ)ミラーマウントKS1TVに取付け可能
- PIA13VF:移動ステージに取付け可能なØ3/8インチ(Ø9.525 mm)バレル
- 高分解能な相対位置決めが求められる用途に適切
- 制御ケーブルの角度は、最大110°まで調節可能
真空対応ピエゾ慣性アクチュエータは、コンパクトな真空対応のパッケージで、ピエゾ制御により長い移動距離と高分解能な直線移動を行います。各アクチュエータの最大荷重は2.5 kgです。また、バックラッシュなしで20 nmの典型的なステップサイズが得られます。このステップサイズは、コントローラKIM001またはKIM101(どちらも下記にて別売り)を用いて最大30%(約30 nmまで)の調整が可能です。ただし、開ループ設計、ヒステリシス、使用条件などの影響で、システムのステップサイズは最大20%程度変動する可能性があり、また一般に再現性もありません。この変化を除去するには外部フィードバックシステムが必要です。なお真空向けではない用途には、標準のピエゾ慣性アクチュエータ もご用意しております。
このアクチュエータは、システム静止時やピエゾ素子に電源が供給されていない時には自動的にロックされるので、ナノメートルレベルの分解能やアライメントの長期安定性を必要とする用途に適しています。ピエゾアクチュエータを使用してアクティブにネジを移動させていないときは、アジャスターネジのノブを用いて手動調整が可能です。ノブは2.0 mm六角レンチでも操作できます。
長さ10 mmの多段チップ型ピエゾアクチュエータで駆動することにより、これらのアクチュエータは最大速度3.5 mm/分で作動します。ピエゾモータはその伸縮に伴って送りネジを回転させる設計になっています(下記参照)。
取付け
アクチュエータPIAK10VFには1/4"-100ネジ付きバレルが付いており、ミラーマウントKS1TVなどに取付けが可能です。こちらのアクチュエータは当社のPolaris®ミラーマウントにはご使用いただけません。詳細については下記をご覧ください。
アクチュエータPIA13VFにはØ3/8インチ(Ø9.525 mm)バレルが付いているので、Ø3/8インチ(Ø9.525 mm)の取付け用クランプが付いたすべての手動式移動ステージに取り付け可能です。
アクチュエータには長さ0.75 mのリード線が付いており、そのほかに真空チャンバの外での接続用に長さ1.0 mのケーブルが付属します。このリード線とケーブルは必要に応じて切断可能ですが、真空槽の内外あわせた全長は2.0 mを超えないようにしてください。上の写真のようにアクチュエータの制御ケーブルは最大で110°まで回転するので、スペースの限られた場所でも使用できます。
必要なコントローラ
このステージの操作にはコントローラKIM001またはKIM101が別途必要です(下記参照)。ピエゾ慣性アクチュエータは一般的なピエゾコントローラでは駆動できません。このドライバには鋸歯状波形の電圧信号発生器が内蔵されており、85 V~125 Vの制御可能な振幅を有するサブミリ秒のパルス(ステップ)を出力できます。
Click to Enlarge
ピエゾ慣性アクチュエータの動作の簡略図
ピエゾ慣性「スリップスティック」モータ
送りネジの慣性と摩擦係数に基づいて設計することにより、送りネジの回転軸に対して垂直に取り付けた積層ピエゾ素子でネジを動かすことができます。分離された2本のアーム(クランプ)がピエゾ素子の両側に付いています。これらのアームは、左の図のように主送りネジの上部と底部を挟む形で伸びています。この様子は左の略図で描かれています。
ピエゾ素子は特殊な鋸歯状の電圧波形に応答して伸縮します。この波形は非対称で、ある電圧まで緩やかに上昇させた後、ナノセカンドの時間スケールでゼロまで急落させます。左の下側の図のように、電圧が緩やかに上昇している間は、アームは送りネジに押し付けられ(「スティック」)、ちょうどネジを親指と人差し指で回しているようなかたちになります。一方、ナノセカンドの時間スケールで電圧が急落すると、アームはネジの慣性と摩擦係数の変化により「スリップ」し、元の位置に戻ります。このメカニズムにより、1つのピエゾ素子で送りネジをその長さ全体にわたって動かすことができます。
使用条件やピエゾ素子のヒステリシス、コンポーネントのバラツキ、軸方向の負荷などの様々な要因によってステップサイズは変化し、また再現性もありません。この変動を除去するには、外部フィードバックシステムが必要です。また、用途によってはステッピングモーターアクチュエータでも代用可能な場合があります。
| Item #a | PIAK10VF | PIA13VF |
|---|---|---|
| Travel | 10 mm (0.39") | 13 mm (0.51") |
| Typical Step Sizeb,c | 20 nm | |
| Maximum Step Size | 30 nm | |
| Step Size Adjustabilityc | ≤30% | |
| Maximum Step Frequency | 2000 Hz | |
| Backlash | None | |
| Maximum Active Preloadd | 30 N | 25 N |
| Typical Angular Resolutione | KS1TV Ø1" Mirror Mount: 0.5 µrad | N/A |
| Recommended Maximum Active Axial Load Capacityf | 2.5 kg (5.51 lbs) | |
| Speed (Continuous Stepping) | 2 mm/minute (Typical) < 3.5 mm/minute (Maximum) | |
| Drive Screw | 1/4"-80 Thread, Hard PVD Coated | |
| Actuator Tip | Tungsten-Carbide-Coated Ball | |
| Lifetime | > 1,000,000,000 Steps | |
| Motor Type | Piezoelectric Inertia | |
| Piezo Specifications | ||
| Max Operating Voltage | 125 V | |
| Capacitance | 175 nF | |
| Resonant Frequency | 125 kHz (No Load) | |
| Physical Specifications | ||
| Dimensionsg (L x W x H) | 77.7 mm x 31.5 mm x 17.0 mm (3.06" x 1.24" x 0.67") | 59.4 mm x 31.5 mm x 17.0 mm (2.34" x 1.24" x 0.67") |
| Mounting Feature (Auxiliary) | 1/4"-100 Thread with Lock Nuth (Ø3/8" [Ø9.525 mm] Barrel) | Ø3/8" (Ø9.525 mm) Barrel (3/8"-40 Thread with Lock Nut) |
| Vacuum Rating | 10-6 Torr | |
| Operating Temperature | 5 to 130 °C (41 to 266 °F) | |
| Cable Length | 0.75 m (2.48 ft) Flying Lead for Vacuum, 1.0 m (3.3 ft) of Cored Cable for Wiring Outside Chamber | |
| Connector Type | SMC Female | |
| Cable Exit Adjustability | ±55° for Left- or Right-Hand Exit | |
| Compatible Controlleri | KIM001 or KIM101 | |
当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
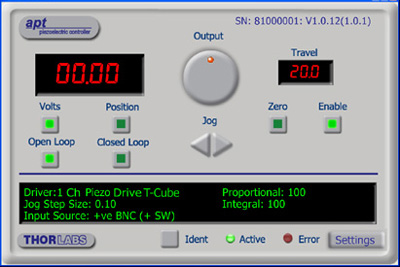
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.47
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisまたはAPTベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内KinesisまたはAPT駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
| Posted Comments: | |
| No Comments Posted |

 ズーム
ズーム- コンパクトなパッケージで高分解能な直線移動が可能なアクチュエータ
- PIAK10VF:取付け用の1/4"-80ネジでØ25.4 mm(Ø1インチ)ミラーマウントKS1TVに取付け可能
- PIA13VF:Ø3/8インチ(Ø9.525 mm)取付けバレル付きで、Ø3/8インチ(Ø9.525 mm)取付けクランプの付いた手動ステージに取付け可能
- 操作にはコントローラKIM001またはKIM101が必要(別売り、下記参照)
当社の真空対応ピエゾ慣性アクチュエータは、特にスペースが限られているときに、設置するだけで簡単に使用したいという用途に適しています。主な機能は相対位置を設定してそれを保持することです。アクチュエータへの電源供給をOffにすると、1/4"-80微細駆動ネジと同じドリフトが生じます。アクチュエータPIAK10VFはミラーマウントKS1TVに対応し、アクチュエータPIA13VFは小型の位置決めステージに対応します。どちらもナノメートルレベルの分解能とアライメントの長期安定性が得られます。ピエゾアクチュエータがアクティブにネジを移動させていないときは、アジャスターネジのノブを使用した手動調整が可能です。ノブは2.0 mm六角レンチにも対応します。真空対応のステージならびにミラーマウントをご希望の際は、当社までご相談ください。
このような「スリップスティック」特性を得るために非常に短いパルス幅を使用するので、アクチュエータを連続ステッピングすると60~70 dBレベルの可聴ノイズが発生します。
注:なお、アクチュエータPIAK10VFは、1/4"-100アジャスタ付きのPolaris®マウントには対応しませんのでご注意ください。Polarisマウントではボール接触がサファイア端の中心にくるよう、また全距離移動用に適切なネジ間隔があるよう、特定のボールサイズと先端設計のアクチュエータが必要です。アクチュエータPIAK10VFの場合、ボール先端ではなくネジの側面がサファイア端に接触するため、Polarisマウントにはご使用いただけません。

 ズーム
ズーム| Key Specificationsa | ||
|---|---|---|
| Item # | KIM001 | KIM101 |
| Piezoelectric Outputs (SMC Male) | One | Four |
| Piezo Output Voltage | 85 to 125 VDC | 85 to 125 VDC per Channel |
| Top Panel Controls | Scroll Wheel | Dual-Axis Joystick |
| External Input (SMA Female) | ±10 V ± 2% | |
| Input Power | +15 VDC @ 2 A | |
| Housing Dimensionsb | 60.0 mm x 60.0 mm x 47.0 mm (2.36" x 2.36" x 1.85") | 121.0 mm x 60.0 mm x 47.0 mm (4.76" x 2.36" x 1.85") |
| Compatible Software | Kinesis | Kinesis & Legacy APT |
- 詳細な仕様については下の赤いアイコン(
 )をクリックしてマニュアルをご覧ください。
)をクリックしてマニュアルをご覧ください。 - 取付けプレートは含みません。
- コンパクトな設置サイズ
- 出力電圧の調整範囲:85 V~125 V
- 1チャンネルおよび4チャンネルのタイプをご用意
- 上面のコントロールパネルとディスプレイ画面による単体での操作、またはUSB接続によるPC制御が可能
こちらのコンパクトなK-Cubeコントローラを用いると、当社のピエゾ慣性ステージ、ピエゾ慣性アクチュエータ、ピエゾ慣性アジャスタ付き光学マウントなどに対して、簡単なマニュアルやPC制御が可能になります。出力電圧の調整範囲は85 V~125 Vです。上面パネルのディスプレイ画面を使用すれば、PCに接続しなくても、ユニットの電源をONにするだけですぐに操作を開始できます。またどちらのコントローラもUSB接続が可能で、当社のKinesis®ソフトウェアパッケージ(付属します)を用いて接続するだけでお使いいただけるPC制御が可能になります。コントローラKIM101は、当社の従来のAPT™ソフトウェアパッケージを使用して操作することもできます。
サイズは小型で、ベースプレートのM6ザグリ穴スロットを使用すれば光学テーブルに直接取り付けることができます。コントローラは小型であるため電動システムの近くに設置することもでき、これは上面パネルのコントロールを用いてモータの位置を手動で調整する際には便利です。また、テーブル上で操作することで駆動ケーブルの長さが短くなり、ケーブルの管理も楽になります。
これらのコントローラには電源が付属しませんのでご注意ください。対応可能な電源は下記でご紹介しています。
シングルチャンネルコントローラKIM001
シングルチャンネルピエゾ慣性コントローラは、1台のピエゾ慣性ステージまたはピエゾ慣性アクチュエータに対して電圧を供給できます。上面パネルにはバネ付きのスクロールホイールがあり、これを用いてステージやアクチュエータを操作したりメニューを選択したりできます。
4チャンネルコントローラKIM101
4チャンネルコントローラには、ピエゾ慣性デバイスを駆動するためのSMC出力端子が4つ付いています。これらのチャンネルは、上面パネルの2軸ジョイスティックを使用してそれぞれ単独あるいはペアで操作できます。コントローラは、最大4台までのPDシリーズピエゾ慣性ステージまたはPIAシリーズピエゾ慣性アクチュエータ、あるいは2台までのPIMシリーズピエゾ慣性光学マウントを操作するように設定できます。1台のKIM101では、コントローラのメニュー選択において同じ「Select Stage」を選択するデバイス以外は、同時に駆動することはできません(詳細はマニュアルに記載されています)。
詳しい内容については、製品紹介ページをご参照ください。
電源
モーターコントローラKIM001およびKIM101には、電源は付属していません。対応する電源KPS201(下記参照)を別途ご提供しています。
注:設計上の特性、および非線形の高周波スイッチング技術を使用していることにより、KIM001およびKIM101はUSBコントローラハブ&電源KCH301およびKCH601には対応していません。ご使用いただける電源はKPS201のみです。

 ズーム
ズーム- モーターコントローラKIM001およびKIM101に対応
- 日本国内向けのアダプタープラグが付属
電源KPS201の出力電圧は+15 VDC、最大電流は2.66 Aで、3.5 mmジャックで1台のK-CubeまたはT-Cubeに電力を供給します。標準的な壁コンセントに接続して使用します。