 Products Home
Products Home電動アクチュエーター、移動量10 mm以下
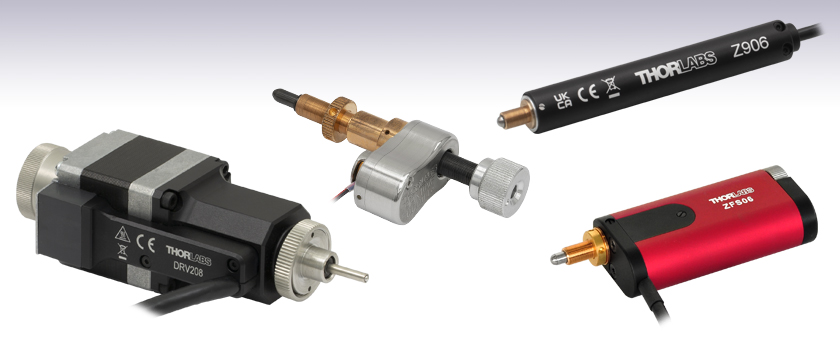
- High-Resolution Piezo Inertia, Stepper, and DC Servo Actuators
- Compatible with a Wide Range of Stages
- Velocities up to 5 mm/s
PIAK10VF
10 mm Travel
Piezo Inertia Actuator,
Vacuum Compatible
Z906
6 mm Travel, DC Actuator
DRV208
8 mm Travel,
Stepper Motor Actuator
ZFS06
6 mm Travel, Compact
Stepper Motor Actuator










Please Wait

 ズーム
ズーム
特長
- 小型パッケージ:長さ86.5 mm、完全収納式
- 後部のつまみネジによる手動調整が可能
- アクチュエータ先端は非回転式
- 1/4"-80ネジ付きのミラーマウントならびに移動ステージに対応
- 移動量13 mmならびに25 mmのタイプもラインナップ
当社の電動式アクチュエータZFS06は、完全収納時86.5 mm長のコンパクトで流線型のパッケージ内で、滑らかで精密な線形移動制御を実現します。 コンパクトな設計によってアクチュエータの端からオプトメカニクス部品までの距離が縮まり、質量の中心が上記のアクチュエータZST206よりも接触点に近い位置になります。 アクチュエータには1/4"-80ネジ付きのバレルがあり、1/4"-80ネジ付きの手動式ミラーマウントや位置決めステージに取り付けることができます。
小径で2相双極のステッピングモータ駆動により、このアクチュエータは最高速度2.0 mm/sで作動します。 アクチュエータ先端の接触点を非回転式にしたため、摩耗や摩擦が低減され、動作の滑らかさが改善されています。 アクチュエータに電源が供給されない場合、後部のつまみネジを使用して手動調整が可能です。 電源供給中につまみネジを回転させるとアクチュエータのモータが破損する恐れがありますのでご注意ください。
アクチュエータZFS06にはステッピングモータが内蔵されており、最大荷重40 Nを移動させる十分なトルクを有しています。 移動範囲全体に渡り非常に小さいステップサイズを可能にしており、また、低いバックラッシュ(<15 µm)ならびに高分解能を有しております。 減速比400:9のギアヘッド設計によりアクチュエータを49,152マイクロステップ/回転の性能を持つステッピングモータードライバKST201と組み合わせると、理論的な移動量は1マイクロステップ毎に0.46 nmとなります(詳細については「計算」タブをご覧ください)。
| Item # | ZFS06 |
|---|---|
| Travel | 6 mm (0.24") |
| Backlasha | < 15 µm |
| Bidirectional Repeatability | < 5.0 µm |
| Home Location Accuracy | < 5.0 µm |
| Maximum Load Capacity | 40 N (8.99 lbs) |
| Velocity | 2.0 mm/s (Max) |
| Acceleration | 10 mm/s2 (Max) |
| Gearbox Ratio | 400:9 (Approx. 44:1) |
| Limit Switches | Hall Effect |
| Lead Screw Pitch | 1.0 mm |
| Motor Type | 2-Phase Stepper |
| Microsteps per Revolution of the Motorb | 24 Full Steps, 2048 µsteps per Full Step 49,152 µsteps per Revolution |
| Calculated Minimum Incremental Motionc | 0.46 nm |
| Operating Temperature | 5 to 40 °C (41 to 104 °F) |
| Dimensions (L x W x H) | 86.5 mm x 35.0 mm x 19.0 mm (3.40" x 1.38" x 0.75") |
| Cable Length | 0.6 m (2 ft) |
| Connector | HDDB15 |
| Required Controller | KST201 |
ホール効果リミットスイッチは、ユニットのオーバードライブを防ぎ、5.0 μm未満の確度でホーミングが可能です。 ZFSシリーズのアクチュエータには、当社のステッピングモーターコントローラKST201に対応する15ピンDサブコネクタ付きの0.6 m長のケーブルが付属します(「ピン配列」タブをご覧ください)。1 m長の延長ケーブル(PAA614) も別売りでご用意しております。
ZFS06は、特に狭い空間で使用する1/4"-80ネジ付き移動ステージならびにミラーマウント用の手動アジャスタの代用品として設計されています。 取り付ける際には、既存の手動アジャスタをマウントから取り外し、アクチュエータZFS06をねじ込んでください。 下の写真では、2つの電動式アクチュエータZFS06が、KM100のつまみネジの代わりに付いています。

マイクロステップ毎の線形変位量の計算方法
ZFSシリーズモータの各製品の移動量は24フルステップ/回転で、ドライバKST201で駆動した場合では、移動量は2048マイクロステップ/フルステップ、よってモータ1回転の移動量は49,152 マイクロステップとなります。 モータの出力軸のギア比は400:9となっています。 これは1.0 mmピッチの送りネジを1回転させるためにモータを44.445回転させる必要があることを意味しています。 最終的に送りネジを1.0 mm移動させるときを想定します。
マイクロステップ毎の送りネジの線形変位量:
マイクロステップ数 x ギア比= 49,152 x 44.445 = 2184560.64
マイクロステップ毎の送りネジの線形変位量は、
1.0 mm / 2184560.64 = 0.46 x 10-6 mm = 0.46 nm
ピン配列
高密度 Dタイプ オス型 15ピンコネクタ
コネクタのピン配列
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Limit Ground | 8 | Reserved for Future Use |
| 2 | CCW Limit Switch | 9 | Reserved for Future Use |
| 3 | CW Limit Switch | 10 | Vcc (+5 V DC) |
| 4 | Motor Phase B- | 11 | Reserved for Future Use |
| 5 | Motor Phase B+ | 12 | Reserved for Future Use |
| 6 | Motor Phase A- | 13 | Reserved for Future Use |
| 7 | Motor Phase A+ | 14 | Reserved for Future Use |
| - | - | 15 | Ground |

Click to Enlarge
高密度 Dタイプ オス型 15ピンコネクタ
| Posted Comments: | |
Franklin Wei
(posted 2022-12-05 00:17:39.137) Is there an equivalent of ZFS06 which can be fitted to an SCP05 X-Y 0.5" translation mount? Our application requires a very compact actuator with 1mm of travel in X and Y for automatic confocal pinhole alignment. DJayasuriya
(posted 2022-12-05 10:59:25.0) Thank you for your inquiry. Unfortuantely we dont have cage mounts that would work with actuators yet. We have got in touch with you directly to discuss your application. |

 ズーム
ズーム特長
- アクチュエータ先端は非回転式
- 双極のステッピングモーターアクチュエータ:長さ111.0 mm
- 1/4"-80ネジ付きバレル
- 1/4"-80ネジ付きのミラーマウントならびに移動ステージに対応
- 移動量13 mmならびに25 mmのタイプもご用意しております。
当社のZSTシリーズのアクチュエータは、111.0 mm長のパッケージ内で滑らかで精密な線形移動制御を実現します。 小径で2相双極のステッピングモータ駆動により、このアクチュエータは最高速度2.0 mm/sで作動します。 アクチュエータ先端の接触点を非回転式にしたため、摩耗や摩擦が低減され、動作の滑らかさが改善されています。 アクチュエータには1/4"-80ネジ付きのバレルがあり、1/4"-80ネジ付きの手動式ミラーマウントや位置決めステージに取り付けることができます。
ZST200シリーズのアクチュエータには全てステッピングモータが内蔵されており、最大荷重40 Nを移動させる十分なトルクを有しています。 移動範囲全体に渡り非常に小さいステップサイズを可能にしており、また、低いバックラッシュ(<15 µm)ならびに高分解能を有しております。 減速比41:1のギアヘッド設計によりアクチュエータを49,152マイクロステップ/回転の性能を持つステッピングモータードライバKST201と組み合わせると、理論的な移動量は1マイクロステップ毎に0.5 nmとなります(詳細については「計算」タブをご覧ください)。
| Item # | ZST206 |
|---|---|
| Travel | 6 mm (0.24") |
| Backlasha | < 15 µm |
| Bidirectional Repeatability | < 5.0 µm |
| Home Location Accuracy | < 5.0 µm |
| Maximum Load Capacity | 40 N (8.99 lbs) |
| Velocity | 2.0 mm/s (Max) |
| Acceleration | 10 mm/s2 (Max) |
| Gearbox Ratio | 29791:729 (Approx. 41:1) |
| Limit Switches | Hall Effect |
| Lead Screw Pitch | 1.0 mm |
| Motor Type | 2-Phase Stepper |
| Microsteps per Revolution of the Motorb | 24 Full Steps, 2048 µsteps per Full Step 49,152 µsteps per Revolution |
| Calculated Minimum Incremental Motion | 0.5 nm |
| Operating Temperature | 5 to 40 °C (41 to 104 °F) |
| Dimensions (L x W) | 111.0 mm x 19.0 mm (4.37" x 0.75") |
| Cable Length | 0.6 m (2 ft) |
| Connector | HDDB15 |
| Required Controller | KST201 |
ホール効果リミットスイッチは、ユニットのオーバードライブを防ぎ、5.0 μm未満の確度でホーミングが可能です。 このアクチュエータには、当社のステッピングモーターコントローラKST201に対応する15ピンDサブコネクタ付きの0.6 m長のケーブルが付属します。1 m長の延長ケーブル(PAA614)も別売りでご用意しております。
ZST206は、特に1/4"-80ネジ付き移動ステージならびにミラーマウント用の手動アジャスタの代用品として設計されています。 取り付ける際には、既存の手動アジャスタをマウントから取り外し、アクチュエータZST206をねじ込んでください。
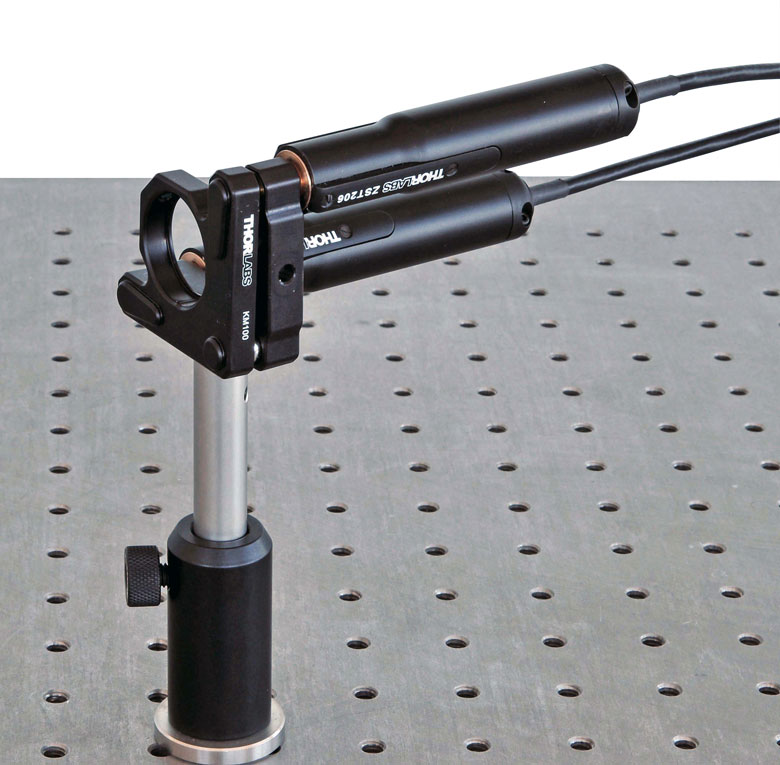
ミラーマウントKM100。ネジアジャスタが2つのアクチュエータZST206に替えられています。
Click to Enlarge
マイクロステップ毎の線形変位量の計算方法
ZST200シリーズ モータの各製品の移動量は24フルステップ/回転で、ドライバKST201で駆動した場合では、移動量は2048マイクロステップ/フルステップとなります。 よって、モータ1回転の移動量は49,152マイクロステップとなります。 モータの出力軸のギア比は40.866:1となっています。 これは1.0 mmピッチの送りネジを1回転させるためにモータを40.866回転させる必要があることを意味しています。 最終的に送りネジを1.0 mm移動させるときを想定します。 マイクロステップ毎のアクチュエータの線形変位量は以下の式を用います。
マイクロステップ毎の送りネジの線形変位量:
マイクロステップ数 x ギア比= 49,152 x 40.866 = 2,008,645.63
マイクロステップ毎の送りネジの線形変位量は、
1.0 mm / 2,008,645.63 = 0.49 x 10-6 mm = 0.5 nm
ピン配列
高密度 Dタイプ オス型 15ピンコネクタ
コネクタのピン配列
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Limit Ground | 8 | Reserved for Future Use |
| 2 | CCW Limit Switch | 9 | Reserved for Future Use |
| 3 | CW Limit Switch | 10 | Vcc (+5 V DC) |
| 4 | Motor Phase B- | 11 | Reserved for Future Use |
| 5 | Motor Phase B+ | 12 | Reserved for Future Use |
| 6 | Motor Phase A- | 13 | Reserved for Future Use |
| 7 | Motor Phase A+ | 14 | Reserved for Future Use |
| - | - | 15 | Ground |
Click to Enlarge
高密度 Dタイプ オス型 15ピンコネクタ
| Posted Comments: | |
| No Comments Posted |

 ズーム
ズーム
| Item # | Z906 |
|---|---|
| Travel Range | 6 mm (0.24") |
| Encoder Resolutiona | 34,555 counts/mm (Linear Displacement) |
| Maximum Pushing Force | 45 N |
| Homing Repeatability | ±5 µm |
| Uncompensated Backlash | 6 µm |
| Uncompensated Bidirectional Repeatability | ±3 µm |
| Residual Backlash After Compensationb | 0.1 µm |
| Compensated Bidirectional Repeatability | ±0.3 µm |
| Travel Accuracyc | 6 µm |
| Minimum Repeatable Incremental Movement | 0.2 µm |
| Maximum Speedd | 2.6 mm/s |
| Maximum Acceleration | 4 mm/s2 |
| Maximum Phase to Phase Resistance | 33.0 Ω |
| Maximum Phase to Phase Inductance | 0.6 mH |
| Tested Lifetimee | > 100,000 Cycles |
| Operating Temperature Range | 41° to 104° F (5° to 40° C) |
| Weight | 0.13 kg |
| Motor Typef | DC Servo |
| Cable Length | 485.0 mm (19.09") |
| Required Controller | KDC101 |
特長
- DCサーボアクチュエータ
- サブマイクロメートルの分解能
- 最大動作速度:2.6 mm/s
- 移動量6 mmの様々な手動アクチュエータと交換可能
- 1/4”-80の取付けネジが付いたステージやマウントに取付け可能
- リミットスイッチ付き(ゼロ点とアクチュエータ保護用)
- 移動量12 mmおよび25 mmのタイプもご用意
当社の電動アクチュエータZ906は、ミラーマウントやステージのような光学的位置決め装置と組み合わせて使用するように設計されています。これらの製品は軽量なパッケージながら高分解能であるため、光学実験を自動化する用途に適しています。
電子機械式のリミットスイッチにより、オーバードライブの防止と正確なホーミングの位置決めが可能です。内蔵されているモータは最大速度2.6 mm/sまで動作しますが、仕様に示す制御性能を得るために最大速度を2.3 mm/s以下に制限して駆動することをお勧めします。エンコーダの精度はモータ1回転あたり512カウントで、最小分解能は約29 nmになります。詳細は「計算」タブをご覧ください。
Z906は、特に1/4"-80の取付けネジを有するステージやミラーマウントに付いている手動アジャスタの交換用品として設計されています。取り付ける際は、単純に既存の手動アジャスタをマウントから取り外し、アクチュエータをねじ込んでください。下の写真は、片方のネジアジャスタをアクチュエータZ906に交換したミラーマウントKM100です。ユニットには、長さ485 mmのケーブルが付いています。 長さ2.5 mのエクステンションケーブル(PAA632)を別途ご購入いただくこともできます。
DCサーボコントローラKDC101は、Z9シリーズのアクチュエータに適したドライバです。最新のKinesisソフトウェアはこちらからダウンロードいただけます。KDC101をZ9シリーズアクチュエータと組み合わせてご使用いただくには、バージョン2.2.8以上のファームウェアが必要です(バージョン1.14.40以上のKinesisソフトウェアをダウンロードしていただくと付属しています)。旧バージョンのファームウェアでもZ9シリーズを駆動できますが、その場合、アクチュエータはZ8と呼ばれます。
より大きな移動量が必要な場合には、移動量12 mmのZ912や移動量25 mmのZ925といったアクチュエータをご検討ください。当社では10-6までの真空圧力に対応するZ906Vもご提供しています。この製品には0.5 mのリボンケーブル、IDCコネクタ、コントローラKDC101用コンバーターケーブルが付属しています。詳細は下記の製品紹介をご参照ください。

Click to Enlarge
ミラーマウントKM100。片方のネジアジャスタがアクチュエータZ906に替えられています。
ピン配列
高密度 Dタイプ オス型 15ピンコネクタ
コネクタのピン配列
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Ground (Limit and Vcc) | 9 | Resistive Identification |
| 2 | Forward Limit | 10 | +5 VDC |
| 3 | Reverse Limit | 11 | Encoder Channel A |
| 4 | Reserved for Future Use | 12 | Reserved for Future Use |
| 5 | Motor (-) | 13 | Encoder Channel B |
| 6 | Reserved for Future Use | 14 | Pin 2 Ident EEPROM |
| 7 | Motor (+) | 15 | Pin 1 Ident EEPROM |
| 8 | Reserved for Future Use |
Click to Enlarge
高密度 Dタイプ オス型 15ピンコネクタ
エンコーダーカウントごとの線形変位の計算方法
Z906には、モータ1回転につき512のエンコーダーカウントがあります。モータの出力軸のギアヘッド比は67.49:1となります。これにより、1.0 mmピッチの親ネジを1回転させるためにモータを67.49回転させます。その結果親ネジは1.0 mm前進します。
エンコーダ1回転によるアクチュエータの線形変位は、次の式で示されます。
512 x 67.49 = 34,555 親ネジ1回転につき34,555 エンコーダーカウント
エンコーダ1カウントによる親ネジの線形変位は、
1.0 mm / 34,555 counts = 2.9 x 10-5 mm (29 nm)
となります。
| Posted Comments: | |
| No Comments Posted |

 ズーム
ズーム| Item # | Z906V |
|---|---|
| Travel Range | 6 mm (0.24") |
| Encoder Resolutiona | 34,555 counts/mm (Linear Displacement) |
| Maximum Pushing Force | 45 N |
| Homing Repeatability | ±5 µm |
| Uncompensated Backlash | 6 µm |
| Uncompensated Bidirectional Repeatability | ±3 µm |
| Residual Backlash After Compensationb | 0.1 µm |
| Compensated Bidirectional Repeatability | ±0.3 µm |
| Travel Accuracyc | 6 µm |
| Minimum Repeatable Incremental Movement | 0.2 µm |
| Maximum Speedd | 2.6 mm/s |
| Maximum Acceleration | 4 mm/s2 |
| Maximum Phase to Phase Resistance | 33.0 Ω |
| Maximum Phase to Phase Inductance | 0.6 mH |
| Tested Lifetimee | >100,000 Cycles |
| Operating Temperature Range | 41° to 104° F (5° to 40° C) |
| Vacuum Rating | 10-6 Torr |
| Weight | 80 g |
| Motor Typef | DC Servo |
| Cable Length | 485.0 mm (19.09") |
| Required Controller | KDC101 |
特長
- 6 VDCサーボアクチュエータ
- サブマイクロメートルの分解能
- 最大動作速度:2.6 mm/s
- 移動量6 mmの様々な手動アクチュエータと交換可能
- 1/4"-80の取付けネジが付いたステージやマウントに取付け可能
- リミットスイッチ付き(ゼロ点とアクチュエータ保護用)
- 10-6 Torrまでの真空度に対応
- 移動量12 mmと25 mmの製品もご用意
アクチュエータZ906Vは、上記のアクチュエータZ906と同様の特長と仕様を有しますが、さらに10-6 Torrまでの真空圧力下でご使用いただくことができます。このアクチュエータには、真空対応のサーボモータ、リン青銅製の内部カップリング機構や取付けブッシュ、高真空用グリースなどが使用されています。
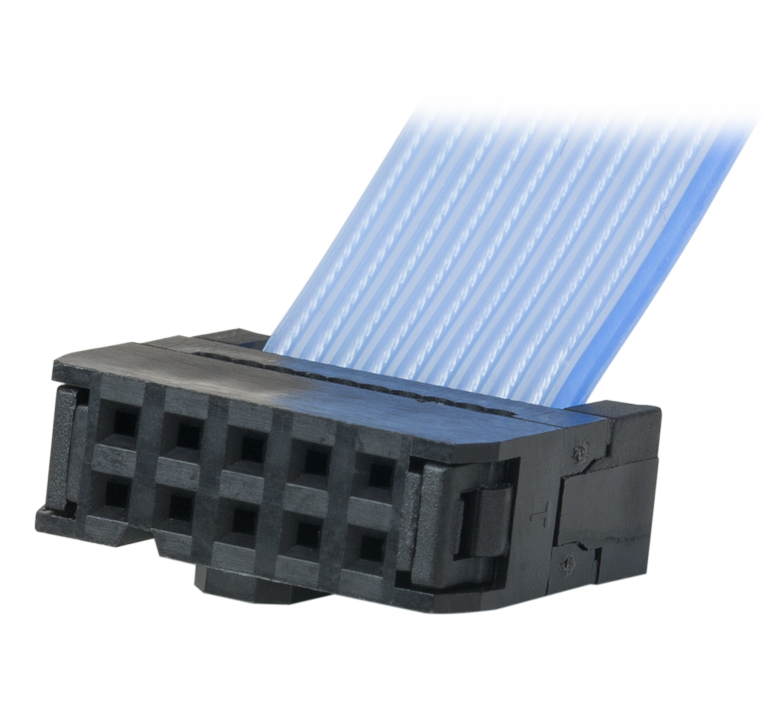
アクチュエータZ906Vには、IDCコネクタの付いた、長さ485 mmの真空対応フラットリボンケーブルが付属しています。このケーブルの導線は標準的なAWG28、ピッチは1.27 mm、絶縁体はフッ化エチレンプロピレン(FEP)です。コントローラKDC101用のコンバーターケーブルも付属していますが、真空対応ではないため、チャンバの外でのみご使用ください。
DCサーボコントローラKDC101は、Z9シリーズのアクチュエータを駆動するのに必要なドライバです。最新のKinesisソフトウェアはこちらからダウンロードいただけます。KDC101を真空対応アクチュエータZ9シリーズに使用するには、ファームウェアバージョンは2.2.8以降、Kinesisソフトウェアバージョンは1.14.44以降であることが必要です。
より長い移動量が必要な場合には、移動量12 mmのアクチュエータZ912Vや移動量25 mmのアクチュエータZ925BVをご覧ください。真空対応のステージやミラーマウントをご希望の場合は、当社 までご相談ください。
エンコーダーカウントごとの線形変位の計算方法
Z906Vには、モータ1回転につき512のエンコーダーカウントがあります。モータの出力軸のギアヘッド比は67.49:1となります。これにより、1.0 mmピッチの親ネジを1回転させるためにモータを67.49回転させます。その結果親ネジは1.0 mm前進します。
エンコーダ1回転によるアクチュエータの線形変位は、次の式で示されます。
512 x 67.49 = 34,555 親ネジ1回転につき34,555エンコーダーカウント
エンコーダ1カウントによる親ネジの線形変位は、
1.0 mm / 34,555 counts = 2.9 x 10-5 mm (29 nm)
となります。
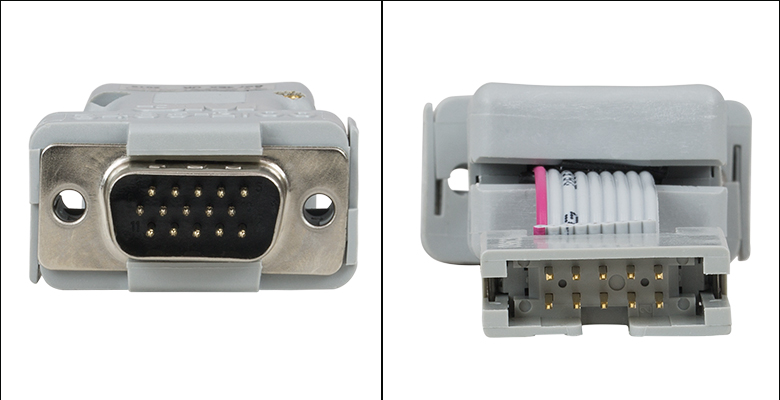
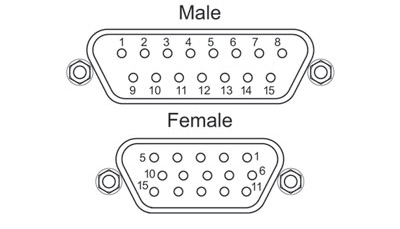
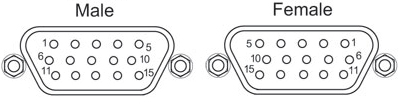
アクチュエータZ906Vに内蔵されている真空対応のケーブル端には、メス型10ピンIDCソケットコネクタが付いています。Z906Vにはこのメス型IDCソケットコネクタをDタイプオス型HD 15ピンコネクタに変換する短いコンバーターケーブルが付属しているので、推奨のコントローラKDC101にアクチュエータを容易に接続できます。このコンバーターケーブル(右の写真には終端コネクタが表示されています)は、真空対応ではありません。メス型IDCソケットとDタイプオス型HDコネクタ(メス型IDCソケットコネクタ接続時)のピン配列は下の図をご参照ください。
ピン配列
10ピン メス型 IDCソケットコネクタ
(Amphenol社製T812シリーズ、
2.54 mmピッチ)
10ピン メス型 IDCコネクタのピン配列
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor (+) | 6 | Motor (-) |
| 2 | Vcc | 7 | Limit Ground |
| 3 | Channel A | 8 | Reverse Limit |
| 4 | Channel B | 9 | Forward Limit |
| 5 | Ground | 10 | Not Connected |
ピン配列
高密度 Dタイプ オス型 15ピンコネクタ
オス型 HDDB15コネクタのピン配列
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Ground (Limit and Vcc) | 8 | Reserved For Future Use |
| 2 | Forward Limit | 9 | Ident Resistor |
| 3 | Reverse Limit | 10 | Vcc (+5 VDC) |
| 4 | Reserved For Future Use | 11 | Encoder Channel A |
| 5 | Motor (-) | 12 | Reserved for Future Use |
| 6 | Reserved for Future Use | 13 | Encoder Channel B |
| 7 | Motor (+) | 14, 15 | Reserved For Future Use |
Click to Enlarge
コネクタにコンバーターケーブルを取り付けた様子。左図は高密度 Dタイプ オス型 15ピンコネクタ、右図は10ピン オス型 IDCソケットコネクタ。
| Posted Comments: | |
| No Comments Posted |

 ズーム
ズーム
| Item # | DRV208 |
|---|---|
| Travel | 8 mm (0.3") |
| Unidirectional Repeatability | 3.6 µm |
| Bidirectional Repeatability | 5.0 µm |
| Absolute Accuracy | 17.1 µm |
| Maximum Force | 180 N |
| Maximum Velocity | 5 mm/s |
| Maximum Acceleration | 5 mm/s2 |
| Full Step Angle | 1.8° |
| Feedback | None |
| Limit Switches | Hall Effect |
| Lead Screw Pitch | 0.5 mm |
| Homing Repeatability | 13.5 µm |
| Motor Type | 2-Phase Stepper |
| Microsteps per Revolution of Leadscrew | 409,600 |
| Compatible Controllers | BSC201 MST602 |
特長
- 全移動量:8 mm
- 最大発生力:180 N
- アクチュエータ先端は非回転
- 500 mmのD型コネクタ付きケーブルが付属
- 3 mのエクステンションケーブルも付属
- アダプタMCA1またはMCA2を用いて、Ø3/8インチ(Ø9.525 mm)またはØ10 mm取付けバレルに変換可能
モジュール型ステッピングモーターアクチュエータDRV208は、当社の3軸ならびに 6軸NanoMax™フレクシャーステージ用に設計されています。M22 x 0.75のねじ付きフランジにより直接NanoMaxステージに取り付けられるため、要件に応じてアクチュエータを各軸ごとにお選びいただけます。 クイック接続アダプタMCA1またはMCA2を用いることで、アクチュエータを標準的なØ3/8インチ(Ø9.525 mm)あるいはØ10 mm取付クランプ付きステージに取り付けることも可能です。さらにアクチュエータDRV208は、ピエゾアクチュエータDRV120も取付け可能で、組み合わせることにより、電子制御によるピエゾ駆動で20 µmの微動調整が可能になります。
こちらのアクチュエータの移動範囲は8 mmで、最大速度は5 mm/sです。この強力なステッピングモータードライバの最大発生力は180 Nです。
モータの後軸にあるローレット付きノブは、アクチュエータの電源がOFFの時に手動アジャスタとして使えます。 なお、開ループシステムにおいてアクチュエータの位置を手動調整した場合、アクチュエータと制御ソフトウェアの位置表示が一致しなくなります。この不一致はホーミング操作を行ってアクチュエータを元の位置(ゼロ)に戻すことで修正できます。これはアクチュエータの電源をONにした直後にも行う操作です。ノブはステッピングモータからの振動を吸収する慣性ダンパとしても機能します。
ユニットにはステッピングモータをコントローラに接続する15ピンD型コネクタ付きケーブル(長さ500 mm)が付属します。長さ3 mのエクステンションケーブル(型番 PAA613)も付属します。短いケーブルが必要な場合には、長さ1 mのケーブルPAA612を別途ご用意しています。

Click to Enlarge
DRV208は3軸NanoMaxステージに取り付けることができます。
マイクロステップごとの線形変位の計算方法
アクチュエータDRV208で使われているステッピングモータは、モータが1回転するたびに200のフルステップを行ないます。各フルステップは2048マイクロステップに分割されます。コ ントローラBSC201を使用した場合、モータの1回転ごとに409,600のマイクロステップとなります。そのため親ネジは0.5 mm前進します。マイクロステップの線形変位は、次の式で計算されます。
親ネジ1回転につき409,600マイクロステップ
親ネジ1回転ごとの線形変位は:
0.5 mm / 409,600 = 1.2 x 10-6 mm
となります。フルステップでの線形変位の計算には、409,600を200に置き換えてください。
ピン配列
高密度 Dタイプ オス型 15ピンコネクタ
コネクタのピン配列
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Limit Switch 0 V | 9 | For Future Use |
| 2 | Limit Switch 0 V | 10 | +5 V |
| 3 | CW Limit Switch | 11 | - |
| 4 | Motor Phase B -ve | 12 | - |
| 5 | Motor Phase B +ve | 13 | +5 V |
| 6 | Motor Phase A -ve | 14 | - |
| 7 | Motor Phase A +ve | 15 | Ground |
| 8 | - | - | - |
Click to Enlarge
高密度 Dタイプ オス型 15ピンコネクタ
| Posted Comments: | |
guanghai zhang
(posted 2020-05-03 09:19:19.12) Hellow, can this modtor be controler by BCS101, the last generation controlor?
Best,
Weili DJayasuriya
(posted 2020-05-05 04:39:03.0) Thank you for your inquiry. Unfortunately these new motor types are not implemented in our legacy firmware used with BCS101. Sorry alfred
(posted 2016-09-10 13:00:27.96) Dear Sir:
I come from Chroma ATE Inc.
I have some question for this apt™ Stepper Motor Controllers Type:BSC203
with Motor Type :DRV001(see on the motor's connecter)
1.I'd like to know device unit about the motor: (nm/Pulse?)
According to ThorLab official specification value:
a.Minimum Incremental Movement:60nm/pulse.Does device unit?
b.Lead Screw Pitch:0.5mm.Does express motor rotation one circle forward 0.5mm?
c.Microsteps per Revolution of Leadscrew:Does express motor rotation one circle need 409600pulse?
So (Lead Screw Pitch/Microsteps per Revolution of Leadscrew)=Minimum Incremental Movement,but 1.2nm is not equal 60nm ,why?
2.Kinesis software(Actuator set APT600L X Axis)
a.Step Size=0.5mm: motor rotation one circle forward 0.5mm? but autaul half circle I see.
b.Travel:8mm ,but I could move 12 mm (show on the current device postion).
Does I configuration error?
Thank you. bwood
(posted 2016-09-12 11:09:51.0) Response from Ben at Thorlabs: Thank you for your feedback. I believe this relates to the conversion between microsteps to real world units. For the DRV001 connected to the BSC203, 1mm equates to 819200µs. I will be in direct contact with you so I can gather more details on your system, and troubleshoot you Kinesis issue in more detail. alfred
(posted 2016-09-09 13:13:17.31) Dear Sir:
I come from Chroma ATE Inc.
I have some question for this apt™ Stepper Motor Controllers Type:BSC203
with Motor Type :8 mm Travel Stepper Motor Actuator
As I use Win32 development(refernece ThorLab exmaple code),set velocity=3838090,position=1715200,Acceleration=2253,Motor vibration occurs,(unit:device unit)
but use Kinesis's APP(Version:1.7.0.0),set velocity=2.5,position=10,Acceleration=2,Motor move smooth,(unit:mm)
1.I'd say that this is not the exact setting we wanted on Win32 code.
2.What number is the Minimum Incremental Movement?
Thank you. bwood
(posted 2016-09-12 08:36:18.0) Response from Ben at Thorlabs: Thank you for your feedback. The answers to these questions will depend on the specific method you are using to control your BSC203, and the system you are trying to build. We will be in direct contact to get further details on your setup and to discuss how to control the BSC203. jjurado
(posted 2011-03-22 09:46:00.0) Response from Javier at Thorlabs to benju: Thank you for contacting us with your request. The DRV001 actuators are not compatible with the T-Cube controllers, as they require a higher current input in order to be operated. I will contact you directly for further support. benju
(posted 2011-03-22 01:53:48.0) can this be operated with a t-cube stepper controller as well? klee
(posted 2009-09-24 10:02:13.0) A response from Ken at Thorlabs to jean-thomas.landry: No, the drawing is not showing it at maximum extension. The minimum length is 134mm and the maximum length is 142mm. jean-thomas.landry
(posted 2009-09-23 11:18:40.0) good morning,
Is the pdf drawing of drv001 showing it at maximum extension?
regards, |

 ズーム
ズーム
コントローラ:
KIM001またはKIM101
- KIM001:シングルチャンネル出力
- KIM101::4チャンネル出力、多チャンネルの操作が可能
- 上面パネルによる単体での操作、またはUSB接続によるPC制御が可能
- 出力電圧:85 V~125 V

Click for Details
スペースが限られている用途向けに制御用ケーブルの角度を最大110°まで調節可能
特長
- 31.5 mm x 17.0 mm(W x H)の小型設計
- 20 nmのステップサイズ(典型値)
- アジャスターネジのノブで手動調整が可能
- 最大動作電圧:125 V
- 1/4"-80の取付けネジでミラーマウントに取付け可能
- 移動ステージ用に移動量13 mm、25 mmおよび50 mmのタイプもご用意
- 高分解能な相対位置決めが求められる用途に適切
当社のピエゾ慣性アクチュエータPIAK10は、コンパクトなパッケージで、ピエゾ制御でも長い移動範囲を有しており、高分解能の直線移動を可能にします。最大荷重は2.5 kgまで、最大プリロードは30 Nまでの範囲で20 nmの典型的なステップサイズが得られ、またバックラッシュも生じません。このステップサイズは、コントローラKIM101やKinesis®ソフトウェアを用いて最大30%(約30 nmまで)の調整が可能です。しかし開ループであるため、ヒステリシスや動作方向などの使用条件によって、システムのステップサイズは最大20%程度変化する可能性があり、また一般に再現性もありません。この変動を除去するには外部フィードバックシステムが必要です。
このアクチュエータには1/4"-80ネジ付きバレルがあり、1/4"-80ネジ付きの手動式ミラーマウントや位置決めステージに取り付けることができます。このアクチュエータは、システム静止時やピエゾ素子に電源が供給されていない時には自動的にロックされるので、ナノメートルレベルの分解能や長期にわたるアライメントの安定性を必要とする用途に適しています。ピエゾアクチュエータを使用してアクティブにネジを移動させていないときは、アジャスターネジのノブを用いて手動調整が可能です。ノブは2.0 mm六角レンチでも操作できます。
長さ10 mmの多段チップ型ピエゾアクチュエータにより、このアクチュエータは最大速度3.5 mm/minで動作します。このピエゾモータは、移動中は送りジの先端を回転させるように設計されています。ピエゾ慣性アクチュエータにおける「スリップスティック」モータの設計に関する情報はこちらからご覧いただけます。
| Item # | PIAK10 | |||
|---|---|---|---|---|
| Travel | 10 mm (0.39") | |||
| Typical Step Sizea | 20 nm | |||
| Maximum Step Sizeb | < 30 nm | |||
| Step Size Adjustabilityc | ≤30% | |||
| Maximum Step Frequencyd | 2000 Hz | |||
| Backlash | None | |||
| Maximum Active Preloade | 30 N | |||
| Typical Angular Resolutionf | Ø1" Mirror Mounts: 0.5 μrad Ø2" Mirror Mounts: 0.3 μrad | |||
| Recommended Maximum Axial Load Capacityg | 2.5 kg (5.51 lbs) | |||
| Speed (Continuous Stepping) | 2 mm/minute (Typical) < 3.5 mm/minute (Maximum) | |||
| Drive Screw | 1/4"-80 Thread, Hard PVD Coated | |||
| Motor Type | Piezoelectric Inertia | |||
| Mounting Feature (Auxiliary) | 1/4"-80 Thread with Lock Nut (Ø3/8" [Ø9.525 mm] Barrel) | |||
| Operating Temperature | 10 to 40 °C (50 to 104 °F) | |||
| Dimensions | 72.9 mm x 31.5 mm x 17.0 mm (2.87" x 1.24" x 0.67”) | |||
| Cable Length | 1.0 m (3.28 ft) | |||
| Connector | SMC, Female | |||
| Required Controllerh | KIM001 or KIM101 | |||
必要なコントローラ
当社のピエゾ慣性アクチュエータPIAK10を駆動するには、コントローラKIM001またはKIM101が必要です。標準的なピエゾコントローラでは、このアクチュエータを駆動することはできません。このドライバには鋸歯状波形の電圧信号発生器が内蔵されており、85 V~125 Vの範囲で振幅調整の可能なサブミリ秒のパルス(ステップ)を出力できます。
詳細については、 製品紹介ページをご参照ください。

| Posted Comments: | |
Filip Munz
(posted 2019-08-20 00:43:57.353) Is this Piezo Inertia Actuator (PIAK10) suitable for high vacuum (cca 0.5 mtorr)? Or can we use rather integrated optic mount like KC1-P? The purpose is a sample adjustment in the chamber.
Can you provide also a suitable feedthrough (ideally with KF40 dimensions)? rmiron
(posted 2019-08-20 05:31:14.0) Response from Radu at Thorlabs: Hello Filip. Unfortunately, PIAK10 is completely unsuitable for vacuum applications. However, we are very seriously looking into expanding our range of vacuum-compatible products. I will relay your feedback internally in the hope that it will accelerate the process. In the meantime, you could use POLARIS-K1S2P or POLARIS-K1S3P which are piezo-driven, vacuum compatible, 1" mounts. The Polaris line also contains vacuum-compatible posts. If longer travel ranges are required, you could use our Z812V or Z812BV vacuum-compatible actuators.
With regards to feedthroughs, we only offer KF16 & KF25 ones on our website (https://www.thorlabs.com/newgrouppage9.cfm?objectgroup_id=12861). However, we could offer KF40 ones as a custom item. If you would like to order such custom feedthroughs, please contact your local technical support team. Jin Ic Kim
(posted 2019-03-28 23:06:49.767) When I use two PIAK10 in KM100 mirror mount, contact point of one out of two hole is not surface, so there is damage occurs at the tip of actuator as the tip rotates.
The other comment is that the actuator seems not return its position when I start at 0 to 20000, then send signal to return 0, sometimes big deviation I have. I'm doing wrong? user
(posted 2019-04-03 07:31:30.0) Response from Arunthathi at Thorlabs: Thanks for your query. I have contacted you directly requesting for further information to troubleshoot the issue |

 ズーム
ズームコントローラ:
KIM001またはKIM101
- KIM001:シングルチャンネル出力
- KIM101:4チャンネル出力、多チャンネルの操作が可能
- 上面パネルによる単体での操作、またはUSB接続によるPC制御が可能
- 出力電圧:85 V~125 V
Click for Details
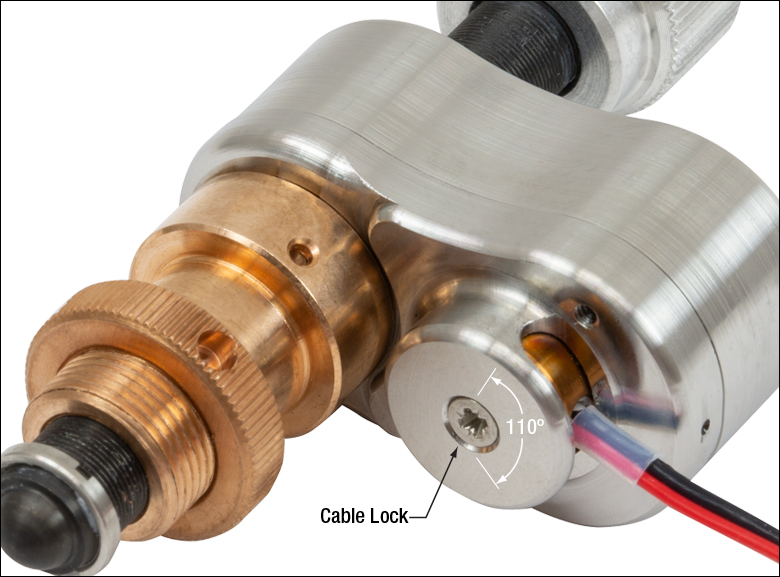
リード線の角度は最大110°まで調節可能(スペースが限られている用途向け)
特長
- 31.5 mm x 17.0 mm(W x H)の小型設計
- 20 nmのステップサイズ(典型値)
- アジャスターネジのノブで手動調整が可能
- 10-6Torrまで対応
- 最大動作電圧:125 V
- KS1TVの取付けネジでØ25.4 mm(Ø1インチ)ミラーマウントKS1TVに取付け可能
- 高分解能な相対位置決めが求められる用途に適切
- 移動ステージ用真空対応ピエゾ慣性アクチュエータPIA13VFもご用意
当社の真空対応ピエゾ慣性アクチュエータPIAK10VFは10-6 Torrまで使用可能で、またコンパクトなパッケージながらピエゾ制御により長い距離を高分解能で直線移動することができます。最大荷重は2.5 kgまで、最大プリロードは30 Nまでの範囲で20 nmの典型的なステップサイズが得られ、またバックラッシュも生じません。このステップサイズは、対応するコントローラやKinesis®ソフトウェアを用いて最大30%(約30 nmまで)の調整が可能です。しかし開ループであるため、ヒステリシスや動作方向などの使用条件によって、システムのステップサイズは最大20%程度変化する可能性があり、また一般に再現性もありません。この変動を除去するには外部フィードバックシステムが必要です。
このアクチュエータは、システム静止時やピエゾ素子に電源が供給されていない時には自動的にロックされるので、ナノメートルレベルの分解能やアライメントの長期安定性を必要とする用途に適しています。ピエゾアクチュエータを使用してアクティブにネジを移動させていないときは、アジャスターネジのノブを用いて手動調整が可能です。ノブは2.0 mm六角レンチでも操作できます。
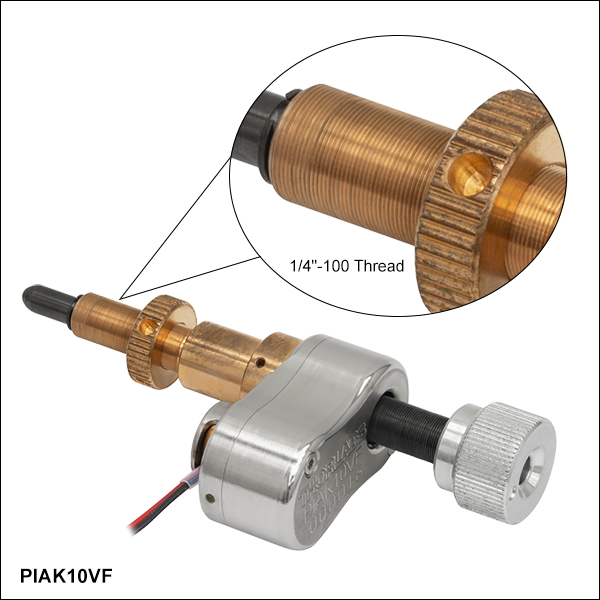
こちらのアクチュエータには1/4"-100ネジ付きバレルが付いており、ミラーマウントKS1TVなどに取付けが可能です。なお、アクチュエータPIAK10VFは、1/4"-100アジャスタ付きPolaris®マウントには対応しませんのでご注意ください。Polarisマウントでは、ボールがサファイア製受け石の中心に接触し、また全移動範囲でネジに適切なクリアランスが得られるよう、特定のボールサイズと特別に設計された先端を有するアクチュエータを必要とします。アクチュエータPIAK10VFの場合、ボール先端の問題ではなく、ネジの側面がサファイア製受け石に接触するために、Polarisマウントにはご使用いただけません。
アクチュエータには長さ0.75 mのリード線が付いており、そのほかに真空チャンバの外での接続用に長さ1.0 mのケーブルが付属します。このリード線とケーブルは必要に応じて切断可能ですが、真空槽の内外あわせた全長は2.0 mを超えないようにしてください。上の写真のようにアクチュエータのリード線は最大110°まで回転できます。これはスペースの限られた場所で有用です。
長さ10 mmの多段チップ型ピエゾアクチュエータにより、このアクチュエータは最大速度3.5 mm/minで動作します。このピエゾモータは、移動中は送りジの先端を回転させるように設計されています。ピエゾ慣性アクチュエータにおける「スリップスティック」モータの設計に関する情報はこちらからご覧いただけます。
| Item #a | PIAK10VF | |||
|---|---|---|---|---|
| Travel | 10 mm (0.39") | |||
| Typical Step Sizeb,c | 20 nm | |||
| Maximum Step Size | 30 nm | |||
| Step Size Adjustabilityc | ≤30% | |||
| Maximum Step Frequency | 2000 Hz | |||
| Backlash | None | |||
| Maximum Active Preloadd | 30 N | |||
| Typical Angular Resolution | KS1TV Ø1" Mirror Mount: 0.5 μrad | |||
| Recommended Maximum Axial Load Capacitye | 2.5 kg (5.51 lbs) | |||
| Speed (Continuous Stepping) | 2 mm/minute (Typical) < 3.5 mm/minute (Maximum) | |||
| Drive Screw | 1/4"-80 Thread, Hard PVD Coated | |||
| Motor Type | Piezoelectric Inertia | |||
| Mounting Feature (Auxiliary) | 1/4"-100 Thread with Lock Nutf (Ø3/8" [Ø9.525 mm] Barrel) | |||
| Operating Temperature | 5 to 130 °C (41 to 266 °F) | |||
| Dimensions | 77.7 mm x 31.5 mm x 17.0 mm (3.06" x 1.24" x 0.67") | |||
| Cable Length | 0.75 m (2.48 ft) Flying Lead for Vacuum, 1.0 m (3.3 ft) of Cored Cable for Wiring Outside Chamber | |||
| Connector | SMC, Female | |||
| Vacuum Rating | 10-6 Torr | |||
| Required Controllerg | KIM001 or KIM101 | |||
必要なコントローラ
当社のピエゾ慣性アクチュエータPIAK10VFを駆動するには、コントローラKIM001またはKIM101が必要です。標準的なピエゾコントローラでは、このアクチュエータを駆動することはできません。このドライバには鋸歯状波形の電圧信号発生器が内蔵されており、85 V~125 Vの範囲で振幅調整の可能なサブミリ秒のパルス(ステップ)を出力できます。
詳細については、製品紹介ページをご参照ください。

| Posted Comments: | |
| No Comments Posted |

 ズーム
ズーム特長
- 1.5 cc 注入器入りのApiezon100グリース
- 便利でムダのない低価格パッケージ
- アクチュエータの寿命を延長
- 使い易いスポイト入り
- 10-9 Torrまでの真空に対応
このApiezonグリースは、優れた焼き付き防止特性を備えています。潤滑性を高めるためのPTFEが含まれ、当社のZST、ZFS、Z9シリーズのアクチュエータの親ネジを再潤滑するのに適しています。この製品は使いやすい注入器入りで、汎用および10-9 Torrまでの真空用途の両方にお使いいただけます。適する動作温度は10~30°Cです。
注:アクチュエータZ9、ZFSおよびZSTの送りネジとエンドボールには、10,000サイクルごと、または動作中にきしみ音が聞こえたら潤滑油を差すことをお勧めします。
| Posted Comments: | |
| No Comments Posted |
DRV、ZSTおよびZFSシリーズのステッピングモーターアクチュエータと、Z9シリーズのDCサーボモーターアクチュエータには、コントローラへの接続用ケーブルが付属しています。当社では、エクステンション用としてご使用いただけるケーブルも別途ご用意しています。
ステッピングモータ用ケーブル
当社では様々なステッピングモーターアクチュエータとコントローラの接続にお使いいただけるケーブルをご用意しております。ZST、ZFSおよびDRVシリーズのステッピングモーターアクチュエータと、BSCシリーズのベンチトップ型コントローラ、K-Cube™コントローラKST201、およびラック型制御モジュールMST602との間の接続をサポートしています。ステッピングモータとコントローラの組み合わせに対して使用可能なケーブルは、下の表をご参照ください。各ケーブルのピン配列は「ピン配列」タブに記載されています。これらのケーブルはコネクタが同じであっても、ピン配列が適合しないモータとコントローラにはお使いいただけませんのでご注意ください。
DCモータ用ケーブル
PAA632(2.5 m)は、Z9シリーズのDCモーターアクチュエータ用ケーブルです。このケーブルはK-Cube DCサーボモーターコントローラKDC101との接続用に作られています。ケーブルのピン配列は「ピン配列」タブに記載されています。 15ピンコネクタを使っていますが、当社のステッピングモータには対応していません。

 |
|








ステッピングモータ用ケーブルPAA612とPAA613
DA15 オス D型 - DE15 メス D型
| DA15 Male Pin | DE15 Female Pin | Description |
|---|---|---|
| 11 and 12 | 1 | Limit Switch Ground |
| 10 | 2 | Reverse Limit Switch |
| 9 | 3 | Forward Limit Switch |
| 7 | 4 | Motor Phase B - |
| 14 | 5 | Motor Phase B + |
| 8 | 6 | Motor Phase A - |
| 15 | 7 | Motor Phase A + |
| 6 | 9 | Reserved for Future Use |
| 5 | 13 | 5 V |
ステッピングモータ用ケーブルPAA632
DE15 オス D型 - DE15 メス D型
| DE15 Male Pin | DE15 Female Pin | Description |
|---|---|---|
| 1 | 1 | Ground |
| 2 | 2 | Forward Limit Switch |
| 3 | 3 | Reverse Limit Switch |
| 5 | 5 | Motor - |
| 7 | 7 | Motor + |
| 10 | 10 | 5 V Encoder Supply |
| 11 | 11 | Encoder Channel A |
| 13 | 13 | Encoder Channel B |
ステッピングモータ用ケーブルPAA614
DE15 オス D型 - DE15 メス D型
| DE15 Male Pin | DE15 Female Pin | Description |
|---|---|---|
| 1 | 1 | Ground |
| 2 | 2 | CCW Limit Switch |
| 3 | 3 | CW Limit Switch |
| 4 | 4 | Motor Phase B - |
| 5 | 5 | Motor Phase B + |
| 6 | 6 | Motor Phase A - |
| 7 | 7 | Motor Phase A + |
| 10 | 10 | +5 VDC |
| 15 | 15 | Ground |
| Posted Comments: | |
| No Comments Posted |