Products Home
Products Homeラックシステム、自動アライメントモジュールNanoTrak®

- Advanced Active Alignment
- High-Voltage Piezo Output Channels for Precise Positioning
- IR (InGaAs) Detector Included
- Visible (Si) Detector Available Separately
MNA601/IR
Rack Module
Application Idea
MNA601/IR Module in MMR601 Rack (Back View)
Full Suite of Software Support Tools Included








Please Wait
用途
- ファイバ同士のアクティブアライメント
- ファイバ光学系と自由空間光学系のアクティブアライメント
- 光学装置のアライメント
- 導波路の接続
- ファイバの特性評価および試験
- アクティブ・パッシブデバイスのファイバ取り付け
- 光学系全体の高スループット維持
| Rack System Motion Control Modules |
|---|
| 2-Channel Piezo Control Module |
| 2-Channel Stepper Motor Controller Module |
| 2-Channel NanoTrak® Auto-Alignment Module |
| 2-Channel Brushless DC Motor Controller Module |
| USB Motion Control 19" Rack Chassis |
| 当社のすべてのラックシステムモジュールには APT™ラックシステムMMR601またはMMR602をお使いください。筐体外部からモジュールを独立して操作することはできません。 |
特長
- 高度な光検出アルゴリズムを用いたアクティブアライメントシステム
- トラッキング機能による適切な光透過効率の恒久的な維持
- アライメントの安定性を長期にわたって維持するためのLatchモード
- MNA601/IRモジュールは2軸制御が可能
- ラックシステムMMR601およびMMR602は最大6モジュールを保持可能
- 2つのピエゾコントローラ出力閉ループフィードバック
- 赤外域(IR)用InGaAsディテクタおよびSMBコネクタが付属
- 可視域(VIS)用Siディテクタヘッドを別売りにてご用意
- サードパーティのカスタム用途向けソフトウェアGUI制御セット
モジュール式のNanoTrak自動アライメントコントローラは、ファイバ同士または光ファイバ光学系と自由空間光学系の結合効率が最大限に得られるような自動制御システム用に設計されています。ピエゾステージによりファイバ先端を円形の走査パターンに動かすと、コントローラはピーク出力方向を決定するために勾配探索を実施し、最大のスループットを得られる位置にファイバを配置させます。2つの高電圧出力チャンネルによりピエゾアクチュエータに電圧信号が供給されるため、ピエゾドライバを外部追加する必要はありません。このファイバーアライメントコントローラは、当社の3軸NanoMaxや6軸NanoMaxステージをはじめとするピエゾ駆動の多軸ステージを組み合わせることにより、自動アライメントシステムとなります。また、プラグイン式のブラシレスモーターコントローラ、ピエゾコントローラ、ステッピングモーターコントローラで構成されたラックシステムと、こちらの自動アライメントモジュールNanoTrakに組み込み可能です。
USBプラグアンドプレイに対応しており、接続するだけで簡単にお使いいただけるPC操作が可能です。PCで使用するKinesis®ソフトウェアは新しい.NETコントロールが特長で、最新のC、C#、LabVIEW™、あるいはその他の.NETに対応する言語を使用してカスタムプログラムを作成するようなサードパーティの開発者も利用することができます。詳細は「モーションコントロールソフトウェア」、「Kinesisチュートリアル」および「APTチュートリアル」タブをご覧ください。
2つのデバイス(例:ファイバ)からの光を結合するために、最初に信号が検出されるまで、デバイスを移動しての検索します。NanoTrakのサポートソフトウェアは、この最初の光検出用に一連の検索アルゴリズムを提供します。NanoTrakは主に光ファイバや光集積装置のアライメントに使われていますが、導波路の特性解析、アクティブおよびパッシブデバイスのファイバーピグテール付け、その他多くのR&D用途のような手間のかかるアライメント作業の自動化にも適しています
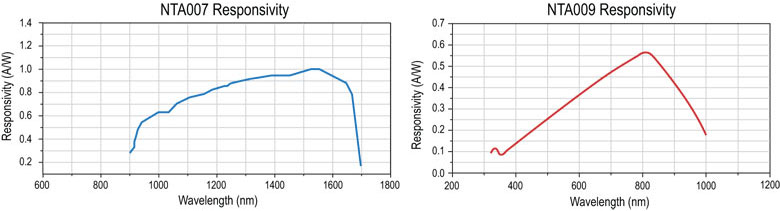
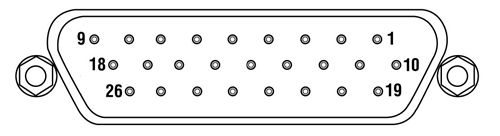
NanoTrakモジュールには、赤外(IR)波長(900~1700 nm)用のInGaAsディテクタ(型番NTA007)と、外部ディテクターヘッドとご使用いただくPINダイオードSMB入力が付属しています。可視(VIS)域波長(320~1100 nm)用のSiディテクタ(型番NTA009)は下記にて別途ご購入いただけます。
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに付属しており、コントローラには付属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。
| NanoTrak® Automated Fiber Alignment Controllers | ||
|---|---|---|
| K-Cube™ 2-Channel Controllers | Benchtop 2-Channel Controller | Modular 2-Channel Rack System Module |
モジュール仕様
| Signal Measurement | |
|---|---|
| PIN Photodiode | |
| Mechanical Connector | SMB Male |
| Photocurrent Range | 1 nA to 10 mA |
| Optical Connector | FC/PC |
| NanoTraking | |
| Circle Scanning Frequency | 1 to 300 Hz |
| Circle Position Range | < 1% to > 99% MPE |
| Circle Diameter Adj. Modes | Automatic and Manual |
| Signal Phase Compensation | ±180° |
| Piezoelectric Input/Output | |
| Number of Piezo Channels | 2 |
| HV Output Connectors | |
| Connector Type | SMC Male |
| Voltage Output | 0 to 75 VDC/Channel |
| Voltage Stability | 100 ppm over 24 Hours |
| Noise | < 3 mV (RMS) |
| Output Current | 500 mA/Channel |
| Analog Output Monitors | |
| Connector Type | BNC |
| Voltage Range | 0 to 10 VDC |
| Strain Gauge Position Feedback | |
| Connector Type | 9-Pin D-Type Female |
| Feedback Type | AC |
| Other Input/Output | |
| Optical Power Monitor | |
| Connector Type | BNC |
| Voltage Range | 0 to 10 VDC |
| Ext Signal In Input | |
| Connector Type | BNC |
| Voltage Range | 0 to 10 VDC |
| User Control | |
| Connector Type | 26-Pin HD D-Type Female |
| Isolated Digital Inputs | 4 off TTL |
| Isolated Digital Outputs | 4 off TTL |
| Trigger Input | 1 off TTL |
| Trigger Output | 1 off TTL |
| Potentiometer Channel Ctrl Input | 1-10 k (Each Channel) |
| Analog Channel Output Monitors | 0 to 10 VDC (Each Channel) |
| General | |
| Dimensions (W x D x H) | 190 mm x 270 mm x 50 mm |
| Weight | 1.5 kg (3.3 lbs) |
光ディテクタ仕様
| Item # | NTA009a | NTA007a |
|---|---|---|
| Detector Type | Si | InGaAs |
| Operating Wavelength | 320 - 1000 nm | 900 - 1700 nm |
| Active Area | Ø0.8 mm | Ø0.12 mm |
| Fiber Input | FC/PC | |
| Rise Time | 100 ps @ 12 V | |
| NEP | 1.5 x 10-15 W/√Hz | 4.5 x 10-15 W/√Hz |
| Dark Current | 0.01 nA @ 10 V | 0.05 nA @ 5 V |
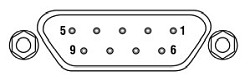
NanoTrak®コントローラ
Dサブメス型
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | DIG I/P 1a | 19 | 10 | DIG O/P 1a | 19 | 19 | Isolated Groundb | - |
| 2 | DIG I/P 2a | 19 | 11 | DIG O/P 2a | 19 | 20 | Ext Trigger I/P | 22 |
| 3 | DIG I/P 3a | 19 | 12 | DIG O/P 3a | 19 | 21 | Ext Trigger O/P | 22 |
| 4 | DIG I/P 4a | 19 | 13 | DIG O/P 4a | 19 | 22 | Ground | - |
| 5 | Channel 1 RS485 (+) | - | 14 | Channel 2 RS485 (+) | - | 23 | 5 V User O/P (Isolated) | - |
| 6 | Channel 1 RS485 (-) | - | 15 | Channel 2 RS485 (+) | - | 24 | Not Used | - |
| 7 | Not Used | - | 16 | Not Used | - | 25 | Analog Ground | - |
| 8 | Channel 2 10 V O/Pc | 25 | 17 | External Analog I/P CH2 0 - 10 V | 25 | 26 | Signal Power Outd | 25 |
| 9 | Channel 1 10 V O/Pc | 25 | 18 | External Analog I/P CH1 0 - 10 V | 25 |
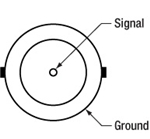
ピエゾコントローラ
Dサブ メス型
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | Wheatstone Bridge Excitation | 4 or 6 | 4 | D.C.(+) or Equipment Grounda | - | 7 | D.C.(-) or Actuator ID Signala,b | 4 or 6 |
| 2 | +15Vc | 4 or 6 | 5 | Feedback Signal In | 4 or 6 | 8 | RS485 (-) | 9 |
| 3 | -15Vc | 4 or 6 | 6 | Equiptment Ground | - | 9 | RS485 (+) | 8 |
LV Out
BNCメス型
0~+10 V。ここからの出力は、HV OUTに反映され、10 VがHV出力端子の75 Vと等しくなります。また、オシロスコープに接続できるので、ピエゾアクチュエータの駆動信号がモニタできます。
HV Out
SMC

0~75 V、0~500 mA。駆動信号をピエゾアクチュエータに送ります。
信号In
BNCメス型
0~10 Vで、抵抗値は100 kΩ。 外部のパワーメータから光パワー信号を受信するために使用します。
当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.47
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisまたはAPTベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内KinesisまたはAPT駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
| Posted Comments: | |
Rich Rademacher
(posted 2019-10-09 11:46:45.533) Hello,
I am working on a nanopositioning project using the MMR601 product. This project requires custom automation and so we cannot use the APT or Kinesis GUI. I do see you have the APT protocol documented and I think we can use this. However, USB is a problem for us.
I see the MMR601 has an external RS485 port on the D-sub user connector. Does this port use the same APT protocol, but obviously without the FTDI chip USB wrapper?
Thanks,
Rich cwright
(posted 2019-10-11 06:19:55.0) Hello Rich,
thank you for contacting us. Yes, the serial commands described in the communication protocol can be used to communicate with the controller over the RS484 pins. The communications protocol is identical regardless of the interface used - USB or RS485. TechnicalMarketing
(posted 2007-10-19 14:58:03.0) Thank you for taking the time to point out the typo in our price box. We appreatiate your contribution to our effort of improving the accuracy and content of Thorlabs website. cjohns
(posted 2007-10-19 14:20:35.0) MNA601/IR - Should be "InGaAs" detector? |

 ズーム
ズームラックシステムMMR601またはMMR602とご使用の際は、NanoTrak®コントローラが光学デバイスをアライメントするときの結合パワーを最適化します。ピエゾドライブからの出力信号によって、適切なスループットが得られるように入力/出力デバイスの位置決めが可能です。コントローラは、IR領域(InGaAs)用ディテクタ、PIN電流アダプタと一緒にお届けします。可視領域 (Si)用ディテクタ(NTA009)は別途お買い求めいただけます(下記参照)。

 ズーム
ズーム Click to Enlarge
Click to Enlargeディテクターヘッドの背面
こちらの赤外(IR)域波長(NTA007)用および可視(VIS)域波長(NTA009)用ディテクターヘッドは、ベンチトップ型(BNT001/IR)、T-Cube™(TNA001/IR、旧製品)、ラックマウント型(MNA601/IR)のNanoTrak®コントローラに対応しています。どちらのディテクターヘッドも背面にFC/PC光ファイバ入力ポートと、ジャックを介してベンチトップコントローラと接続するインターフェイスが付いています(右写真参照)。
| Item # | Wavelength Range | Active Area | Fiber Input | Dark Current | Junction Capacitance |
|---|---|---|---|---|---|
| NTA009 | 320 - 1000 nm | Ø 0.8 mm | FC/PC | 0.01 nA (Typ.) @ 10 V | 3.00 pF(Typ.) @ 10 V |
| NTA007 | 900 - 1700 nm | Ø 0.12 mm | FC/PC | 0.05 nA (Typ.) @ 5 V | 2.0 pF (Typ.) @ 5 V |